基于MEMS陀螺仪进行系统应用设计是一个涉及硬件选型、电路设计、信号处理、算法开发和系统集成的综合过程。以下是实现系统应用设计的关键步骤和要点,以中文阐述:
一、 理解应用需求与选型
-
定义核心参数:
- 量程: 系统预期测量的最大角速度是多少?(例如:±250 dps, ±2000 dps)。
- 带宽: 需要响应的角速度变化有多快?这将影响传感器带宽、采样率和算法设计。(例如:手势识别需要高带宽 >100Hz,航姿参考系统可能需要平衡带宽和噪声)。
- 分辨率/噪声密度: 系统需要检测的最小角速度变化是多少?这决定了陀螺仪的噪声性能要求。(例如:高精度稳定平台需要很低的噪声密度,如 <0.005 dps/√Hz)。
- 精度与稳定性:
- 零偏: 零点偏移大小及其随温度、时间的变化 (零偏稳定性,零偏重复性) 是关键指标。
- 比例因子: 标度因子的精度及其稳定性。
- 非线性度: 输出与输入角速度的非线性程度。
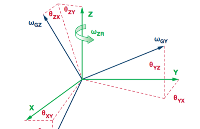
- 轴间敏感度/串扰: 一个轴的运动对另一个轴输出的影响程度。
- 环境要求: 工作温度范围、抗冲击/振动能力、功耗限制。
- 接口: 模拟输出还是数字输出?数字接口类型?(SPI, I2C, UART)。
- 尺寸、成本和功耗: 嵌入式设备或穿戴设备通常对这三项要求严格。
-
选择合适的MEMS陀螺仪芯片:
- 根据上述需求筛选市场上的陀螺仪芯片。
- 仔细阅读和理解选定芯片的数据手册,重点关注性能参数、接口协议、工作模式、寄存器映射、校准信息和典型应用电路。
- 常见供应商:Bosch Sensortec (BMI系列), STMicroelectronics (I3G, LSM系列), TDK InvenSense (ICM, MPU系列), Analog Devices (ADIS, ADXRS系列 - 注意ADXRS多为模拟输出), 美新半导体等。
二、 硬件设计
- 电源电路设计:
- 提供稳定、低噪声的电源电压 (通常1.8V或3.3V)。
- 使用高质量的低压差线性稳压器和必要的去耦电容 (通常要求一个10µF的钽电容或陶瓷电容和几个0.1µF / 0.01µF的陶瓷电容靠近芯片电源引脚)。 电源噪声是MEMS陀螺噪声的主要来源之一!
- 遵循数据手册的推荐值进行电容选择和布局。
- 接口电路设计:
- 数字接口 (SPI/I2C): 正确连接时钟线、数据线、片选线。注意上拉电阻是否需要及其阻值选择。确保主控制器端的引脚电压匹配陀螺仪的接口电压。
- 模拟接口: 需要精密的高分辨率ADC进行采样。关注ADC的参考电压稳定性、采样率、输入阻抗匹配。考虑设计抗混叠滤波器和运放缓冲电路。
- 机械安装与PCB布局:
- 将陀螺仪牢固地安装在PCB或机械结构上,确保其轴线与应用坐标轴精确对准,减少安装误差。
- PCB布局极其关键!
- 将陀螺仪芯片放置在相对稳定、远离振动和热源的位置。
- 电源和地去耦电容必须尽可能靠近陀螺仪的电源引脚和接地引脚。
- 模拟输出走线或数字高速信号走线要短、直,避免长距离并行以减少串扰和EMI。
- 对敏感的模拟部分实施良好的接地策略,如使用接地层。尽量避免数字和模拟地产生压差。
- 考虑使用沉金/化金等表面处理工艺以减少接触电阻的影响。
- 避免将陀螺仪放在有剧烈弯曲或应力集中的区域。
三、 软件与信号处理
- 驱动与数据采集:
- 编写底层驱动程序,实现与陀螺仪的通信(配置寄存器、读取原始数据)。遵循芯片手册的通信协议和时序要求。
- 以足够高的速率(大于奈奎斯特频率,通常至少是目标带宽的2倍以上)稳定可靠地读取原始传感器数据。
- 原始数据处理:
- 校准: 这是获得精确角速度测量的基础!
- 零偏校准: 在静止状态下(零输入角速度)多次采样取平均,估计零偏值,后续数据减去此零偏。通常需要在不同温度点进行补偿。
- 比例因子校准: 施加已知大小的角速度(例如使用精密转台),计算输出值与实际角速度的比例关系。
- 非正交校准: 补偿各个敏感轴未能精确正交的误差(轴间串扰补偿)。通过旋转测试找出敏感矩阵。
- 温度补偿: 零偏和比例因子通常随温度变化显著。需要测量温度(芯片内部集成或外部温度传感器),并建立补偿模型(查找表、多项式拟合、神经网络等)。这是长期稳定性的关键!
- 单位转换: 将原始计数值转换为角速度单位 (dps 或 rad/s)。
- 校准: 这是获得精确角速度测量的基础!
- 滤波:
- 低通滤波: 抑制高频噪声。选择截止频率在应用带宽之外。可使用:
- 软件实现:移动平均、FIR滤波器(线性相位)、IIR滤波器(Butterworth, Chebyshev - 注意相位延迟)。
- 硬件实现:如果使用模拟输出,可在ADC前加入RC滤波器进行抗混叠。
- 高通滤波/零偏跟踪: 用于滤除非常缓慢变化的漂移或零偏波动,但需要小心使用,以免滤除真正的低频信号。
- 动态补偿: 在一些应用中(如强振动环境),需要额外滤波或算法处理振动引起的噪声。
- 低通滤波: 抑制高频噪声。选择截止频率在应用带宽之外。可使用:
- 高级算法与应用处理 (取决于具体应用):
- 积分: 对角速度进行积分得到角度变化量 (姿态角、航向角增量)。但积分会累积零偏误差,导致角度漂移。
- 姿态估计 (Sensor Fusion):
- 通常需要结合 加速度计和磁力计 数据进行互补滤波或卡尔曼滤波。
- 加速度计提供重力方向(俯仰、横滚),磁力计提供绝对航向(偏航)。陀螺仪提供高动态的姿态变化信息。
- 融合算法(如卡尔曼滤波、互补滤波、梯度下降、Madgwick/Mahony滤波器)利用各自优势,克服单一传感器的缺点(陀螺漂移、加速度计动态响应慢、磁力计受干扰)。
- 常用姿态表示法:欧拉角、旋转矩阵、四元数(计算效率高,无万向节死锁)。
- 运动跟踪: 在VR手柄等应用中,结合积分和位置估计算法(通常需要其他传感器辅助)。
- 图像/平台稳定: 检测相机的微小抖动角速度,并实时驱动光学组件或电子稳像算法进行补偿。
- 导航与航位推算: 在GNSS信号失效时(隧道、室内),结合加速度计、轮速传感器等进行短期航位推算(误差会快速累积)。
- 振动分析与健康监测: 测量旋转机械的角速度变化,分析其频谱特征。
四、 系统集成与测试
- 与主控系统集成:
- 将处理后的角速度数据或高级信息(如姿态角)提供给主控制器(MCU,MPU等)。
- 设计通信接口和协议。
- 故障检测与处理:
- 实现传感器状态监控(如读取内置自检结果或数据有效性标志)。
- 设计超量程检测和处理机制。
- 进行数据合理性检查。
- 标定流程:
- 设计自动或半自动的标定程序(包括零偏标定、比例因子标定、正交校准、温补数据采集)。通常需要专用的标定夹具或转台。
- 系统测试与验证:
- 静态测试: 长时间静止测试,评估零偏稳定性和漂移。
- 动态测试: 使用精密转台施加精确控制的角速度,测试比例因子、线性度、带宽、延迟。
- 温度测试: 在温箱中测试器件在整个工作温度范围内的性能,评估温补效果。
- 振动测试: 评估陀螺仪在振动环境下的性能及其对系统的影响。
- 应用场景测试: 在目标应用环境中进行现场测试,验证最终性能指标是否满足要求。
- 功耗测试: 评估系统在不同工作模式下的功耗。
五、 优化与量产考虑
- 性能优化: 优化算法参数(滤波截止频率、融合算法权重)、优化校准模型、改进机械安装。
- 成本优化: 选择性价比高的传感器、简化设计、优化生产流程。
- 功耗优化: 利用传感器的低功耗模式、调整采样率、优化算法效率。
- 软件维护: 代码结构清晰,易于维护和升级。
- 生产测试: 设计高效的生产测试流程,确保每个出厂的系统都满足基本性能要求(如关键参数的测试)。
总结
MEMS陀螺仪的系统应用设计是一个系统工程,需要综合考虑传感器物理特性、电子电路、信号处理算法和最终应用场景。硬件的稳定性(电源、布局)是基础,精确的校准(尤其是温补)是实现精度的关键,合适的滤波和融合算法是提升性能和稳健性的核心。在整个设计过程中,严格遵循芯片手册、进行充分的测试验证和不断的优化迭代是确保系统达到设计目标的必要步骤。
什么是MEMS陀螺仪?
Ericco的MEMS陀螺仪根据轴数分为单轴、双轴和三轴。它分为工业级、战术级(ER-MG-056、ER-MG-067)和导航级(ER-MG2-50/100、ER-MG2-300/400)。战术
2023-07-07 10:16:47
MEMS陀螺仪正在取代光纤陀螺仪?
一、微型科技巨匠:MEMS陀螺仪揭秘 何谓MEMS? MEMS(微机电系统)是融合了微电子与微机械的神奇技术。它能在指甲盖大小的硅芯片上集成复杂的传感器、执行器和处理电路,实现微观世界的数据感知
2025-07-08 16:45:36
利用陶瓷基板实现小型化MEMS陀螺仪
摘要:MEMS(微机电系统)陀螺仪在惯性导航、姿态控制和运动测量等领域中具有重要应用。然而,传统MEMS陀螺仪在尺寸和性能方面存在一定的限制。本文介绍了一种基于陶瓷基板的技术芯片实现了小型化MEMS
2023-07-10 15:03:37
MEMS陀螺仪系统的精确导航
,随着MEMS陀螺仪的兴起,在车辆导航、机械控制等领域,精确导航的竞争一直在对峙。 导航核心——陀螺惯性测量单元 在高精度的捷联惯导系统中,陀螺惯性测量单元是绝对的核心。很长一段时间以来,激光陀螺仪都是中高精度惯导系统
2023-10-24 01:11:00
MEMS陀螺仪如何实现高精度寻北?
MEMS陀螺仪的寻北功能,其核心在于精确测量地球自转角速度的分量。通过解算这些分量,即可确定地理北向。得益于MEMS技术的持续发展,此类陀螺仪在精度与稳定性方面已实现显著跃升。
2025-07-29 18:00:47
MEMS陀螺仪的寻北原理是什么?精度如何?

MEMS陀螺仪的寻北技术核心原理基于地球自转特性,通过测量角速度分量解算出地理北向。随着MEMS技术的不断进步,MEMS陀螺仪性能也在不断提升,已经具备了较高的测量精度和稳定性。
2025-06-04 17:50:04
MEMS陀螺仪用在哪里?
。它在陀螺仪市场占有重要地位,率先在汽车和消费电子领域得到大量应用。随着性能的进一步提高,MEMS陀螺仪的应用也已扩展到工业、航空航天等领域,使其在惯性系统应用领域得到极大拓展。
2023-07-10 14:13:18
MEMS陀螺仪的工作原理及采用差分及四核的设计结构的原因
MEMS 陀螺仪的基本工作原理是通过科里奥利力来实现的,演示文稿中利用生动的动画讲述了这一原理,并介绍了为什么工业级的陀螺仪要采用差分甚至是四核的设计结构。当然,MEMS 陀螺仪的设计架构中还用到了MEMS加速度计的基本设计单元。
2019-07-31 06:18:00
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

在现代无人机技术中,三轴MEMS陀螺仪扮演着至关重要的角色。作为飞行控制系统的核心传感器,它通过实时测量飞行器的角速度变化,为稳定飞行提供关键数据支持。以ER-3MG-063 MEMS陀螺仪为例,让我们深入了解三轴MEMS陀螺仪核心优势和应用价值。
2025-08-07 17:37:05
常见的七大陀螺仪
摆式罗盘。21世纪发展为利用自动控制系统代替重力摆的电控陀螺罗盘,并创造出能同时指示水平面和子午面的平台罗盘。 速率陀螺仪。用以直接测定运载器角速率的二自由度陀螺装置。把均衡陀螺仪的外环固定在运载器上
![]() wayaj
2020-09-06 07:49:27
wayaj
2020-09-06 07:49:27
ADI公司新款MEMS陀螺仪的特性分析
本视频是ADI公司MEMS陀螺仪和同类陀螺仪产品的对比演示,比较两者对错误输出激励的响应。可以看出,我们的结果新款陀螺仪具有高抗振动、抗冲击性和抗线性加速度特性。
2019-07-16 06:12:00
MEMS加速度计和MEMS陀螺仪的区别
MEMS加速度计和MEMS陀螺仪的区别 1、MEMS陀螺仪测角速度的 2、MEMS加速度是测线性加速度的 MEMS陀螺仪MEMS陀螺仪利用科里奥利力旋转物体在有径向运动时所受到的切向力。假设旋转物
2020-04-16 15:10:42
MEMS IMU/陀螺仪对准基础
简介对于在反馈环路中采用MEMS惯性测量单元(IMU) 的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。对于IMU中的陀螺仪,传感器对准误差描述各陀螺仪的旋转轴与系统定义的"
![]() 雪大大11
2019-10-16 08:00:00
雪大大11
2019-10-16 08:00:00
Pinpoint系列MEMS陀螺仪的构造和性能
Mark Marshall博士将探讨这款MEMS陀螺仪的工作原理,并详细介绍其性能规格和Pinpoint结构,包括MEMS振动环的设计与制造。
2023-03-20 09:43:47
MEMS IMU/陀螺仪对准的基础知识

传感器未对准通常是在其反馈回路中使用MEMS惯性测量单元(IMU)的高性能运动控制系统的关键考虑因素。对于IMU中的陀螺仪,传感器未对准描述了每个陀螺仪的旋转轴与系统定义的惯性参考系(也称为全局系)之间的角度差。
2023-01-08 20:05:19
MEMS加速度计和MEMS陀螺仪的区别是什么
MEMS加速度计和MEMS陀螺仪的区别 1、MEMS陀螺仪测角速度的 2、MEMS加速度是测线性加速度的 MEMS陀螺仪MEMS陀螺仪利用科里奥利力旋转物体在有径向运动时所受到的切向力。假设旋转物
2020-06-08 17:01:25
两款同类MEMS陀螺仪产品的性能分析
本陀螺仪演示视频介绍2个ADI MEMS陀螺仪(ADXRS800、ADXRS450)和2个同类陀螺仪产品。可以看到每个陀螺仪对施加的旋转速率所做出的响应。同时还展示了ADI公司陀螺仪出色的冲击和振动抑制性能。
2019-07-16 06:15:00

MEMS陀螺仪如何成为动态世界的“定盘星”?

的姿态与方位变化,是实现定位、导航、制导与控制的基石。而随着任务环境日趋复杂与动态,传统陀螺仪已难堪重负,新一代导航级MEMS陀螺仪正成为关键突破口。
2026-02-10 17:10:23
MEMS陀螺仪有多精确?
ER-MG2 -50/100高性能寻北MEMS陀螺仪的零偏稳定性可达0.1°/hr,零偏重复性为0.1°/hr,可见其测量精度非常高。
2023-07-13 09:32:22
什么是陀螺仪
是世界上第一款集成 6 轴MotionTracking设备。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器 DMP( DigitalMotion Proce...
![]() 香脆面
2022-02-10 07:24:32
香脆面
2022-02-10 07:24:32
陀螺仪的应用
`陀螺仪在航天航空中的应用 陀螺仪器最早是用于航海导航,但随着科学技术的发展,它在航空和航天事业中也得到广泛的应用。 陀螺仪器不仅可以作为指示仪表,而更重要的是它可以作为自动控制系统中的一个敏感
![]() wayaj
2020-09-04 07:52:53
wayaj
2020-09-04 07:52:53
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用 陀螺仪和重力传感器有什么区别呢? 陀螺仪是一种测量和感知设备,可用于测量或检测物体的角速度和角度变化。它由几个基本组成部分组成,包括旋转的转子、悬浮
2023-12-07 11:26:00
MEMS陀螺仪有哪些分类?
你是否好奇,手机里的指南针、无人机稳定的飞行姿态,甚至火箭精准的导航,背后都离不开一个微型“旋转感知器”?这就是MEMS陀螺仪!它凭借小巧身材、低廉成本和优异性能,正在取代笨重的传统陀螺仪,深入我们
2025-07-21 15:58:38
 工商网监
工商网监


