完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > ethercat
EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EtherCAT名称中的CAT为Control Automation Technology(控制自动化技术)首字母的缩写。
文章:1214个 浏览:43297次 帖子:97个

人形机器人开发加速器:EC-Engineer Web + Jetson AGX Orin 的远程诊断新玩法
在全球工业与机器人领域,人形机器人的研发正迎来高速发展。这类机器人不仅依赖强大的AI算力,更要求底层控制系统具备高实时性与高可靠性。在此趋势下,Nvid...

开发者分享 | HPM5E-EC-DEV:基于HPM5E00的EtherCAT开发板分享
Azure一名业余单片机爱好者,平时喜欢折腾各种开发板和新出的MCU。本职工作是一名软件工程师,日常主要从事软件应用开发,更多是和系统、应用打交道。相比...

在工业自动化领域,系统灵活性和维护性至关重要。本文将探讨EtherCAT从站热插拔技术,介绍其如何通过动态管理从站设备,提高系统的灵活性和维护性。Eth...
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析
在工业自动化领域,运动控制的精度和稳定性直接决定了生产效率和产品质量。近日,睿擎SDKV1.5.0版本重磅发布,其中EtherCAT多轴控制技术的升级尤...

讲解一、工业常用网口协议分类工业场景中,网口协议需兼顾“通信稳定性”“同步精度”“抗干扰能力”三大核心需求,不同协议因设计目标差异,在防护方案选型上存在...

新能源产线中,发那科机器人通过协议转换网关与EtherCAT运动控制卡协同作业实例
一、项目背景 在新能源锂电池电芯装配车间,某企业引入发那科M-10iA系列机器人负责极片搬运与堆叠工序,该机器人采用EtherNet/IP协议作为从站设...
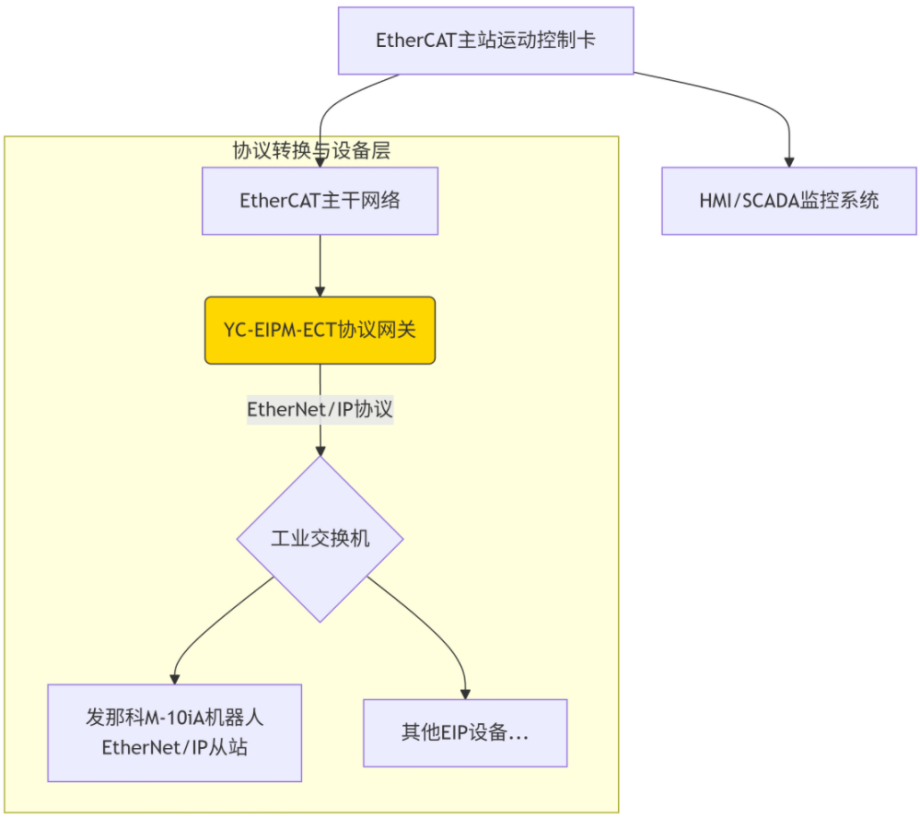
发那科机器人借助EtherNet/IP转EtherCAT网关,实现与EtherCAT运动卡的高效互联案例
一、项目背景 在新能源锂电池电芯装配车间,某企业引入发那科M-10iA系列机器人负责极片搬运与堆叠工序,该机器人采用EtherNet/IP协议作为从站设...

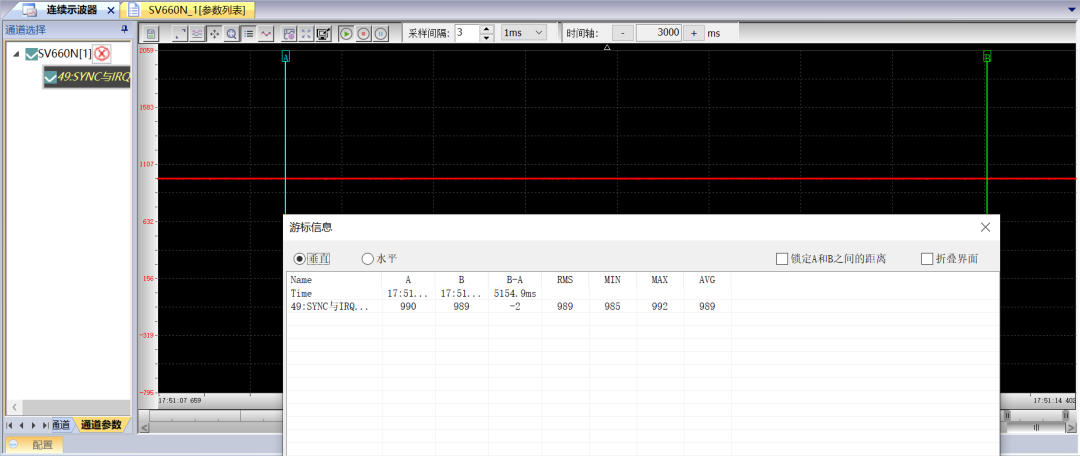
上篇提到利用EtherCAT产生的sync信号,同步所有从站节点系统,完成在同一时刻的电机指令更新。那么,今天跟大家介绍的是如何利用sync信号去同步电...
恩智浦i.MX RT1180跨界MCU驱动EtherCAT的工作流程
上周的分享已经介绍了整个参考设计的概况和相关硬件资源。那么,本次会从软件工程角度进行分享。首先来了解EtherCAT Slave工作流程。
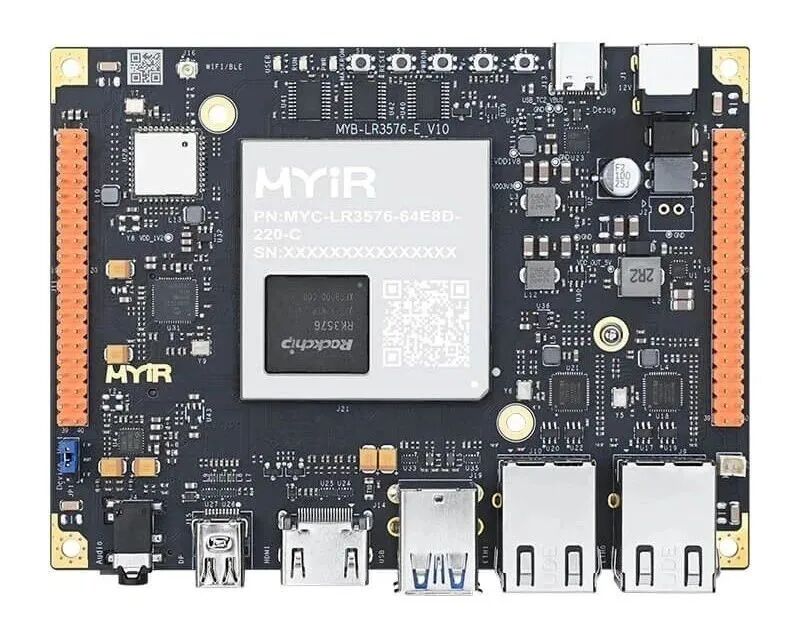
如何移植EtherCAT Igh--基于米尔RK3576开发板
本文将介绍基于米尔电子MYD-LR3576开发板(米尔基于瑞芯微RK3576开发板)的板端移植EtherCATIgh方案的开发测试。摘自优秀创作者-EP...
恩智浦MCU方案 单颗i.MX RT1180实现EtherCAT+伺服控制
介绍基于单颗i.MX RT1180芯片的EtherCAT+伺服电机控制方案-伺服控制板硬件电路资源介绍,即为下图中的Servo Motor Driver...
EtherCAT网络分析仪:工业实时通信的“诊断专家”,让复杂网络透明化
在工业4.0与智能制造的浪潮中,EtherCAT凭借其微秒级实时性、纳秒级同步精度及超90%的有效带宽利用率,已成为机器人控制、CNC机床、智能电网等领...
在工业自动化领域,主站与从站之间的通信比较常见,但从站与从站的通信一直是技术难点。本文将介绍致远电子PCIe-2E主站通讯卡如何通过EtherCAT技术...

注意,运行后需要先手动复位主站的监控数据,监控出现问题时候的数据,启动等其它修改数据不需要,需运行时复位数据开始监控EherCAT_Task 总线任务的...
当EtherCAT高速I/O模块遇上蓝牙耳机生产线,会擦出怎样的火花?
蓝牙耳机作为现代科技的热门产品,其生产流程的高效与精准至关重要。本文将深入剖析蓝牙耳机的生产流程,并重点介绍一套兼顾稳定、快速与性价比的系统搭建方案,带...
PCIe-2E主站卡:高实时性,低门槛的EtherCAT开发方案
在传统的EtherCAT主站开发中,实时操作系统的复杂性常常给开发团队带来挑战。本文将介绍一款创新的PCIe-2E主站卡,它如何通过简化开发流程,降低对...

【干货分享】米尔NXP i.MX 91开发板移植运行IGH EtherCAT主站
米尔基于NXPi.MX91的核心板及开发板,搭载新一代入门级NXPi.MX91处理器,内核Cortex-A55,主频高达1.4GHz;支持LPDDR4增...
AWStudio:轻松设置EtherCAT分布式时钟,提升同步精度!
在EtherCAT系统中,确保各从站设备的时钟同步是实现精确控制的关键。本期我们将探讨AWStudio运动控制版如何通过分布式时钟同步机制,解决时钟不一...
上期我们探讨了AWStudio运动控制版的EtherCAT配置功能,这期我们将聚焦于其强大的诊断与监控工具,看看它是如何帮助开发者实时掌握网络状态并快速...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1