机器人的发展。 ROS便是为机器人在研发的过程中的代码复用提供支持的开源框架,大量的机器人开源项目,从感知到控制、从定位到构图、从导航到可视化,几乎都使用ROS作为基础。 Micro-ROS从何而来? Micro-ROS实际上是从ROS2优化而来的
2022-04-07 07:13:00 10239
10239 本文以正运动技术EtherCAT运动控制器ZMC432和ZMC408CE为例,介绍正运动技术运动控制器在ROS上的应用开发。
2024-03-06 11:47:512056 
本文以正运动技术EtherCAT运动控制器ZMC432和ZMC408CE为例,介绍正运动技术运动控制器在ROS上的应用开发。
2024-03-17 11:06:063058 
本篇文章我们主要介绍正运动技术动态链接库环境配置以及EtherCAT运动控制器在ROS下的单轴运动。
2024-03-17 11:11:131884 
电子发烧友网编辑现为读者整合《玩转赛灵思Zedboard开发板》系列文章, 其中包括在ZedBoard开发板上的一些应用实例。本文主要讲述Zedboard上的嵌入式linux应用,包括使用SDK设计最简单的linux应用程序、linux交叉编译环境搭建、设备驱动编写等内容...
2013-01-24 13:38:1825945 本文着重介绍基于机器人操作系统ROS的无人驾驶系统。文中将介绍ROS以及它在无人驾驶场景中的优缺点,并讨论如何在ROS的基础上提升无人驾驶系统的可靠性、通信性能和安全性。 在上篇解析光学雷达
2021-02-15 10:26:004718 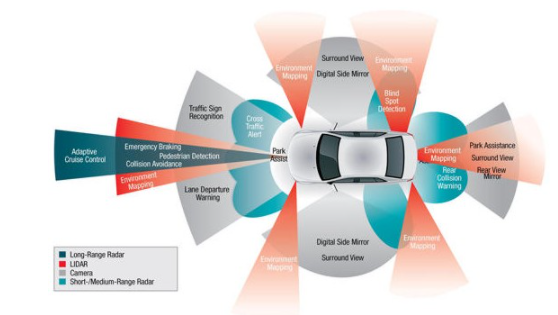
、在ROS小车里面有两个核心控制器,一个是ROS主控,一个是stm32控制器3、ROS主控是树莓派等,只要能在ROS上面将ROS系统跑起来都可以作为ROS主控3、ROS主控主要实现的功能有以下三点:采集雷达信息摄像头信息采集路线规划ROS主要实现的功能1、比如建图导航需要用到激光雷达,色
2021-06-28 07:49:38
原创作者:Alejandro Alonso-Puig、Jenssen CHANG(硅步机器人)————————————————————————————————近期,我在亚马逊出版了新书《ROS
2019-10-17 13:24:25
目录一、ROS简介1、什么是ROS2、ROS产生、发展和壮大的原因和意义二、在Ubuntu系统中,安装对应版本的ROS软件1、确定Ubuntu配置2、添加ROS软件源3、添加密钥4、安装ROS
2021-12-17 08:24:40
Helo人,我一直在使用Zedboard进行一些项目。我的USB_UART适配器与电路板断开连接,无法再次连接。我联系了Xilinx和Digilent,但根据它们无法修复。现在有一个解决方案是买一个
2020-04-02 07:00:45
在Zedboard上实现了Linux,接下来我们就可以像其他的嵌入式linux开发一样来使用Zedboard了。SDK提供了标准可视化的linux-arm交叉编译链,不需要再进行交叉编译环境的搭建
2018-06-28 11:10:51
你好我已经在zedboard上成功开发了SD / MMC驱动程序,我的海量存储应用程序运行正常。 zedboard是否支持SDIO?我正在为AR6K3无线驱动程序工作。在开发SDIO驱动程序时,当我
2019-03-14 07:59:03
由于ROS提供了Android的对应的开发库,我们可以方便的在Android中开发相应的ROS客户端程序。下面介绍一下在Android中使用ROS库的方法。1. 开发环境配置Android的开发一般
2021-05-16 19:16:35
大量的信息。 FirePrime开发板上的系统为Ubuntu15.04,使用的固件为官方最新固件。其他linux版本的系统或其他版本的Ubuntu安装ROS的过程有一些差异。 在ARM类的开发板上
2022-07-07 11:21:36
的rosmaster通信的方式,使得在嵌入式节点上编写、运行ros节点成为可能,主要用于转接IO和各类传感器,运行底层控制算法。要使用rosserial,显然需要分别在嵌入式板卡和主控PC上部署,当前支持的板卡有
2021-08-24 06:19:10
最近新开个项目,控制单驱动轮的AGV小车,通过上位机(安装ubuntu的PC机)和下位机(BBB板)分别安装ROS,通过ROS进行无线通信和控制。不知有哪位高手在BBB板上移植过ROS,并且通过ROS通信时传输数据是否可靠?
2017-08-26 11:11:55
大家了不了解linux如何移植到z-turn board,其方法与移植到zedboard有何区别
2016-07-22 11:24:34
rosserial、ros_lib如何移植到STM32
2021-10-13 06:14:15
将xapp1218移植到zedboard板子上,大体流程是什么
2023-10-18 07:16:25
申请理由:<1>可以在嵌入式开发板中学习ros的更多知识,介绍下ROS,ROS是robot operating system,也就是机器人操作系统,只对
2015-11-02 11:02:16
在 VisionFive2 上安装 ROS2 humble
ROS(Robot Operating System)是一种用于编写机器人软件的灵活框架。它是一个工具(tools)、库
2023-09-04 03:33:42
什么是ROS?如何学习ROS?
2021-11-11 07:21:41
机器人操作系统(ROS)入门(嵌入式系统应用开发)一、ROS 基本问题1. 什么是 ROS2. ROS 产生、发展和壮大的原因和意义二、安装 ROS 及体验小海龟例子1. 安装 ROS一、ROS
2021-12-17 06:08:09
你好,我使用Ubuntu 14.4 lts并且我安装了vivado和petalinux(V2015.4),所以当我想使用SD卡在ZEDboard上启动时,我尝试做我的第一个项目,所以当我尝试下面
2020-05-25 09:17:33
创龙TL5728-EasyEVM-A4开发板如何移植ros机器人操作系统?
2020-01-02 09:32:46
前言最初参考网上资料移植了一份基于串口的STM32通过rosserial和ROS系统通信的代码。对于小数据量格式的消息,可以正常通信,但消息量一大便会出错(如:发布ROS提供的odom和imu格式的消息)。网上还有另一种建立单片机和ROS系统的通信方式,这里的第二点有介绍,这...
2021-08-06 08:54:43
在Android上运行ROS程序一般使用rosjava-android。但是也可以直接利用NDK编译成so文件移植到Android上。当然移植过程也并不简单。 下面是一个简单的例子。安装cmake
2021-05-16 19:20:59
请问有没有最新的rtthread移植micro-ros移植使用教程,使用menuconfig添加配置micro-ros软件包?
2025-09-25 06:37:19
如何在ROS上使用其提供的serial包进行串口通信。我的环境介绍:PC:使用的是Ubuntu 16-04 ROS-Kinetic嵌入式端:STM32F071ROS机器人操作系统是用于创建机器人系统的功能强大的平台,其中包括开发项目所需的一切,从最简单的软件组件(称为“节点”)和数据交换协议到真.
2022-02-21 07:27:14
嗨......我想在ZedBoard上安装Linux,我遵循Zynq™-7000 SoC指南中Tutorial:Ubuntu附带的所有说明,但是我遇到了构建uImage的问题。如果有人可以上传uImage文件可以帮我很多。在此先感谢贾西姆
2019-10-31 09:59:20
我有一个关于Zedboard输出的快速问题。我试图通过其中一个PMOD连接器在我的Zedboard上生成25MHz时钟信号输出。我用LVTTL将端口限制在3.3V。有一个警告,我正在抑制,所以我不期
2020-03-18 10:12:09
我想在zedboard上测试DDR读/写。 zedboard上的DDR大小为512M。根据UG585,分配给DDR的地址是0x00100000到0x3fffffff,即1023M。我的设计如下:1.
2019-10-22 08:36:09
大家好,我需要将8位SRAM(例如,http://www.issi.com/WW/pdf/61LV5128AL.pdf)连接到我的Zedboard。我想我可以制作PCB,将SRAM焊接到其上并
2020-03-20 08:29:27
瑞萨电子公司与专门从事中间件解决方案的公司 eProsima 合作,将微型 ROS 移植到 RA 微控制器 (MCU) 中,以便更轻松地开发用于物联网 (IoT) 和工业系统的专业机器人应用程序
2022-02-11 06:19:04
我的板子是匠牛社区的AM5728开发板JN-mini5728,之前一直使用的是RT-Linux和普通嵌入式Linux操作系统,现在在这块板子上已经成功移植了ROS系统,跟大家分享下,嘻嘻
2018-03-29 17:58:57
1. 准备工作 经过前面的环境搭建,HDG2L-IoT评估套件已经能稳定地运行Ubuntu+docker环境,当前需要下载运行ROS镜像即可。 本文参考ROS官方文档《Getting
2023-03-09 13:55:21
vhdl设计时,它无法正常工作。我的设计的目标是使用fpga中的计数器在zedboard上闪烁LED。我使用其中一个DIP开关作为启用,按下按钮作为复位。我的clk是100 MHz Y9引脚复位为P16,使
2020-05-25 07:05:26
关于ROS(Robot OS 机器人操作系统),估计看这个博文的大兄弟之前已经都知道是啥了,我就不咋呼了...对于ROS的安装,在它的官方网站: http://wiki.ros.org/ROS
2021-05-16 19:35:35
μC/OS-Ⅱ在ARM上的移植经验
2009-03-28 09:51:14 15
15 uc/OS-Ⅱ在ARM9上的移植介绍
2009-03-28 09:51:3130 首先介绍嵌入式实时操作系统μC/OS-II 和Nios 嵌入式处理器, 分析μC/OS-II 移植对目标处理器的要求, 重点介绍μC/OS-II 在Nios 处理器上的移植过程,最后在Nios 开发板上对移植工
2011-03-08 09:31:3890 本文主要讲述的是如何将uc/os移植到不同的处理器上。
2009-04-22 16:22:1823 首先介绍嵌入式实时操作系统μC/OS-II 和Nios 嵌入式处理器, 分析μC/OS-II 移植对目标处理器的要求, 重点介绍μC/OS-II 在Nios 处理器上的移植过程,最后在Nios 开发板上对移植工作进行
2009-05-16 14:32:4328 使用WindRiver 公司提供的 Torrnado 集成开发工具,将VxWorks 移植到PowerPc 处理器上,将移植结果应用在跑马灯的实现上,运行正常,表明移植成功。关键字: PowerPC;VxWorks;Tornado;移
2009-06-23 13:08:4544 以UP-NETARM2410 嵌入式开发平台为硬件,介绍了嵌入式实时操作系统μC/OS-II移植条件,阐述了μC/OS-II 在ARM 微处理器(以S3C2410 为例)上的移植过程中的几个重要问题,经过测试,
2009-09-24 10:36:2734 uCOSII在LPC2210上的移植详解:嵌入式实时操作系统在目标处理器平台上的移植是嵌入式软件开发的基础和前提。论文实现了源码公开的嵌入式实时操作系统μC/OS- II 在ARM7 微控制器LPC2
2009-12-31 15:11:29144 实时操作系统μCOS_II在LPC2114上的移植:介绍了实时操作系统!C/ OS- II 的特点和内核结构, 并实现了!C/ OS- II 在Philips 嵌入式处理器LPC2114 上的移植。关键词: !C/ OS- II LPC2114 移植
2010-01-04 12:24:5640 uCOS II 在SkyEye 上的移植分析摘要:移植 uC/OS-II 到 SkyEye 上,既是对 uC/OS-II 的学习和实验,同时也是对 SkyEye仿真器的验证和实践。uC/OS-II 作为一个优秀的实时操作系统已经被移植
2010-02-08 09:58:1234 摘要:在传统8051单片机系统中,受到单片机内部资源的限制,人机接口的软件设计繁琐、不易移植。该文在介绍嵌入式用户图形接口uC/GUI的特点及移植要求的基础上,分析了uC/GUI在
2010-08-06 12:16:2826 ROS路由器安装和配置录像
MikroTik RouterOS 是路由操作系统,是基于x86 PC开发的路由软件,将普通PC变为高性能路由器,现在已移植到MikroTik RouterBOARD硬件平台运行。RouterOS开发
2010-09-09 10:26:4569 介绍在MSP430F149单片机上移植,μC/CUI到MSCl9264液晶的过程, 详细阐述了,μC/GUI移植的原理以及在移植中应注意的事项。μC/GUI是
2006-03-11 12:39:05829 
μC/OS-II在EP7312上的移植首先介绍μC/OS-II操作系统的特点,重点分析μC/OS-II在EP7312上的移植方法,介绍μC/OS-II在EP7312中的开发过程。
关键词 嵌入式操作系统 μC/OS-II EP7312
2009-06-16 11:24:411340 
本内容介绍了在MDK环境下将3.90版本的UCGUI移植到STM32下了,为了方便大家,特写此移植方法,大家可以借鉴
2011-05-03 10:07:1812047 针对嵌入式Linux在s3c2440上的移植目的,通过将嵌入式Linux 内核移植到 S3C2440 处理器的目标板上, 提出了嵌入式Linux 移植的方法与具体实现过程。编译生成的内核在嵌入式系统中运行稳定
2011-08-15 11:30:1268 基于ZedBoard和linux的应用程序HelloWorld的实现(完整工程)获取Zedboard可运行的linux Digilent官网给出Zedboard的可运行linux
2013-01-24 14:15:46152 最近因为需要,要在Zedboard上移植一个无线网卡驱动,因为以前在友善之臂上面移植过,所以以为很简单,没想到这件事情却花了我将近一周才搞好,中间就因为内核的一个小的疏忽,特在此将中间遇到的问题写
2017-02-08 01:49:11726 
交叉编译工具链用于编译uboot和linux内核,也可以用于编译linux的应用程序。 在地址 https://zedboard-book-source.googlecode.com/files
2017-02-08 18:39:48444 
设备树用于硬件和软件之间的信息交互,也就是将ZedBoard的硬件信息传递给linux内核,避免在linux内核中硬编码而影响在其他平台上的可移植性。设备树一般以两种文件格式存在,一个是dts文件
2017-02-09 03:06:11971 
一、软硬件环境 硬件 ZedBoard 软件 操作系统 Window 7 SP1 x64 Ubuntu 12.04 LTS Vivado 2013.4 for windows 交叉编译工具链
2017-02-09 05:31:10644 
和在pc机上一样,建立 文件夹/opt/zedboard/opencv_zed,复制文件进来,解压缩:建立两个文件夹 build、 install
2017-02-10 09:36:111164 
其实在zedboard上运行QT在懒兔子和超群晴天的博客的里面都有写过,还算比较详细,不过也算是为了完整性,rainysky还是要把整个的流程写一遍。
2017-02-10 13:00:491413 
写在前面的话:因为rainysky以前基本没怎么接触过linux以及qt和opencv更不要说移植了,在移植过程中也碰见了很多问题.......
2017-02-10 16:01:121928 
Digilent的OOB设计给出了一个ZedBoard上完整的运行的linux系统所需要的所有文件,包括配置FPGA的bit文件、 配置ARM PS系统的First-Stage boot
2017-02-10 18:46:111916 
基于FatFs在32位微控制器STM32上的移植
2017-09-26 09:31:089 Armboot在EV40评估板上的移植
2017-10-25 11:51:092 步步清晰之uCOSII在STM32上的移植
2017-11-01 08:53:5716 基于自主开发以双核嵌入式CPU EM8301为处理核心的嵌入式应用的目的,针对双核CPU芯片的系统结构和Linux内核的特性,通过研究嵌入式Linux操作系统在SMP系统上的移植,探讨SMP架构多核
2017-11-14 16:09:0911 组件容器,有效地解决了SCA架构在ZedBoard平台上的实现问题,为在ZedBoard上实现以SCA架构为核心的系统开发打下了基础。
2017-11-17 07:19:146622 
将嵌入式开发领域著名的开源嵌入式RTOS --- FreeRTOS 一直到STM32 芯片上运行的移植笔记。
2018-05-09 09:56:295 本文档的主要内容详细介绍的是ADS工程在IAR EWARM上的uCOSII移植的代码分析免费下载
2019-11-28 17:43:3013 嵌入式实时操作系统FreeRTOS在ARM7上移植实现(嵌入式开发工程师待遇)-嵌入式实时操作系统FreeRTOS在ARM7上移植的实现
2021-07-30 12:05:5821 MCU在机器人操作系统(ROS)2数据空间中进行标准化集成,为嵌入式系统提供基于标准通信中间件的既定应用开发框架。将micro-ROS移植至瑞萨RA MCU中,有利于促
2021-09-24 16:22:362810 在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
2021-11-02 15:21:0610 瑞萨电子公司与专门从事中间件解决方案的公司 eProsima 合作,将微型 ROS 移植到 RA 微控制器 (MCU) 中,以便更轻松地开发用于物联网 (IoT) 和工业系统的专业机器人应用程序
2021-12-08 13:51:089 stm32应用:lua在Keil上的移植和使用Lua的简介Lua的移植关于Lua的应用举例Lua 是一种轻量小巧的脚本语言,用标准C语言编写并以源代码形式开放, 其设计目的是为了嵌入应用程序中,从而
2021-12-20 18:51:5716 角速度、实际线速度STM32端ROS端之前运行的ROS项目都是在终端编译,用vim或者gedit修改代码,很不方便,函数跳转查看都没办法实现。所以今天先安装一个IDE试试ROS官网上有一个不同IDE的对比文章,网址我选择VScode...
2021-12-24 19:00:5112 说是移植,实际上是添加柿饼库到工程,并完成LCD驱动和触摸驱动的对接,其中LTDC驱动SDK中已经完成了移植,RGB屏的移植主要就是时钟频率...
2022-01-25 18:10:060 在STM32上移植的一个稳定可靠的FIFO,可移植到其他的STM32的单片机上。
2022-09-26 16:08:436 在STM32上移植的mx_wifi源代码,可方便移植到其他的STM32单片机上。
2022-09-26 16:35:542 NVIDIA Isaac ROS 是一个硬件加速包集合,能够使 ROS 2 开发者更容易地在 NVIDIA 硬件上构建高性能解决方案。Isaac ROS 提供了单独的软件包(GEMs)和完整的管道
2022-11-10 11:00:211646 近来找到的实习主要是做智能车控制,用到的也就是ROS机器人操作系统,ROS需要运行在一个操作系统上,这个操作系统常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS组合就是实习的主要学习内容了。所以我就新开了一个坑,网络上ROS的资源很丰富,我在此只是用以分享学习笔记。
2023-05-19 17:07:418610 
有关ROS系统的相关知识已经在上一篇文章中进行了阐述,在本篇文章中,将就ROS的进一步搭建方法做阐述。
⚠️:本文中“消息代理”、“主服务器”、“Master Server”是相同的意思,可以互换。
2023-05-19 17:17:05863 
如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。
2022-10-10 18:15:412013 
快速上手micro ros && RT-Thread(serial和udp方式)
2023-10-26 16:13:572696 
现在市面上最常见的还是USB摄像头,物美价廉,要想使USB摄像头在ROS下正常工作,我们就需要一个软件包来支持,现在ROS下最常用的usb摄像头软件包就是usb_cam了,简单理解该软件包就是V4L(Video for Linux)USB摄像头驱动在ROS在的一个移植版本。
2023-10-29 11:26:291477 
对于ROS而言,其最常用的就是Topic话题以及Service两个了。之前我们在了解Unity Robotics Hub时候就了解到基本的Unity和ROS的通讯,下面我们来详细介绍一下Unity
2023-11-17 17:22:252165 
也是毫不夸张的。 ROS的扩展即ROS universe,是全球范围的代码,有不同国家的ROS社区组织开发和维护。 有的是库代码,如OpenCV、PCL等;库的上一层是从功能角度提供的代码,如人脸识别,导航等,调用下层的库;最上层的代码是应用级的代码,让机器人完成某一确定的功能。 ROS真的是包
2023-11-21 18:12:201196 基本概念: ROS是一个用于在不同进程间匿名的发布、订阅、传递信息的中间件。 ROS2系统的核心部分是ROS网络(ROS Graph)。 ROS网络是指在ROS系统中不同的节点间相互通信的连接
2023-11-27 11:21:152735 安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还是会复用ROS2中的功能,所有ROS2的原生功能也可以支持
2023-12-01 16:02:242494 
可以使用的动态的值,用于影响运行程序的行为。环境变量通常包含一些关键信息,如路径、用户名、颜色选项等。 在ROS中,环境变量是重要的,因为它们用于确定ROS如何运行和找到相关文件和程序。 为什么要设置ROS环境变量 在使用ROS之前,我们需要设置
2023-12-28 13:52:423707 正运动技术动态链接库环境配置以及EtherCAT运动控制器在ROS下的单轴运动。
2024-03-13 14:54:051418 电子发烧友网站提供《zedboard原理图介绍.pdf》资料免费下载
2024-04-07 09:10:0312
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论