 实现ARM+ROS(机器人操作系统)之运行ROS!
实现ARM+ROS(机器人操作系统)之运行ROS!

如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。
1. 准备工作
经过前面的环境搭建,HDG2L-IoT评估套件已经能稳定地运行Ubuntu+docker环境,当前需要下载运行ROS镜像即可。
本文参考ROS官方文档《Getting started with ROS and Docker》,结合我司的HDG2L-IoT评估套件实现ROS方案完全搭建流程,参考网址如下所示。

2. 选择ROS镜像
目前docker官网提供了搭建好的ROS镜像(支持arm64架构),网址为:

如下所示。
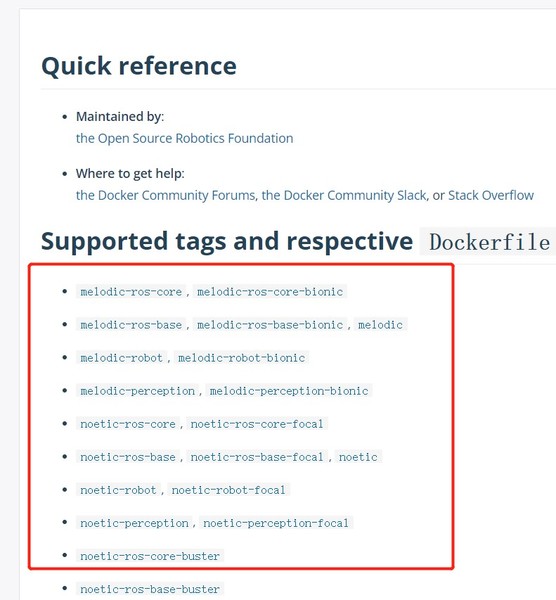
下载命令如下所示,填入上图的字符串。

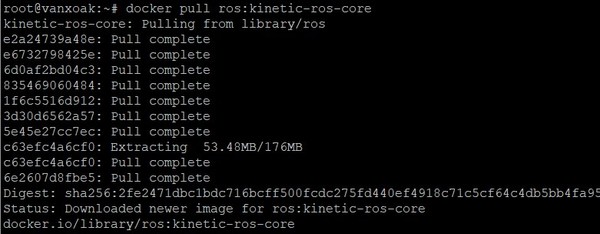
3. 下载ROS镜像
根据项目需求选择合适的ROS镜像,本例以kinetic-ros-core为例,下载命令如下所示。

下载完成如下图所示:
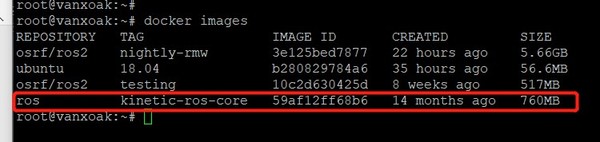
查看镜像的命令:

4. 运行ROS容器
使用下载下来的ROS镜像来启动容器,命令如下所示。

以终端模式进入ROS容器。
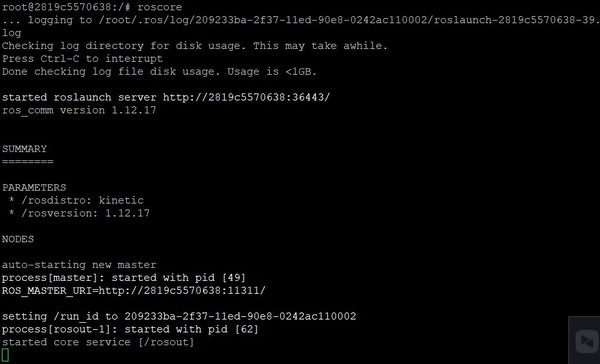
5. 启动ROS应用
进入后运行roscore来启动运行ros节点必要的ROS Master和ROS parameter,运行情况如下所示。
至此,我们通过三篇文章从硬件与底层、环境搭建、ROS运行等方面为大家介绍了一个全新的ARM+ROS的软硬件实现方案。文章中若有不明之处或需要技术问题交流请随时联系万象奥科官方。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ARM开发
+关注
关注
0文章
37浏览量
10016
发布评论请先 登录
相关推荐
热点推荐
探索RISC-V在机器人领域的潜力
运行ROS 2,充分证明了RISC-V架构完全有能力承载机器人操作系统这样的复杂软件栈。它不仅是学习RISC-V的绝佳工具,更是探索未来边缘计算和智能
发表于 12-03 14:40
NVIDIA助力新一代机器人开发开源框架
今年的 ROSCon 在新加坡举办,并于 10 月 29 日顺利闭幕。大会吸引了全球机器人操作系统(ROS)领域开发者的关注。ROS 是目前全球应用最广泛的
ROS 传感器模块的通用架构设计与跨中间件扩展实践
3DGS与4DGS的核心应用实践与技术突破!在自动驾驶与机器人仿真领域,传感器数据的高效交互是连接虚拟仿真与实际系统的关键纽带。ROS(RobotOperatingSystem)作为行业通用的

如何基于翼辉信息SylixOS开发ROS 2应用
ROS 2(Robot Operating System 2)是机器人操作系统(ROS)的升级版,是一套开源的专为机器人开发而设计的软件库与

硬核上车!RK3576基于Ubuntu部署ROS机器人系统详细攻略(上)
本文适用于瑞芯微RK3562、RK3566、RK3568、RK3576、RK3588等Arm64位SoC,适配开发ROS2系统。各型号触觉智能均有配套核心板及开发板,实现了百分百全国产

鸿道Intewell操作系统:人形机器人底层操作系统
操作系统的实时性赋能东土科技的鸿道(Intewell)工业操作系统作为国内唯一通过汽车、工业控制、医疗、轨道交通四项功能安全认证的系统,为标准体系中的技术层架构提供了底层支持。其微内核虚拟化架构可将人形
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
2的cv_bridge库,可以轻松实现ROS图像消息与OpenCV格式的转换,这在实际开发中极为便利。
视觉巡线与二维码识别的应用
视觉巡线是机器人自主导航的经典案例,书中从仿真到真实机器
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
的知识,还需要对ROS 2的节点通信和数据处理有一定的了解。通过实践这一部分内容,我掌握了如何在ROS 2中实现二维码识别,这对于提高机器人的智能性和交互性具有重要意义。
地图构建:S
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
规划:导航是机器人自主运行的关键功能。书中详细介绍了基于 ROS 2 的导航系统,包括地图创建、路径规划和导航控制等环节。首先,通过激光雷达等传感器获取环境信息,使用 SLAM(Sim
发表于 04-27 11:24
做ros0小车仿真实验室stp 文件免费获取方法
做ros小车仿真实验室时,用Solidworks到处urdf文件,但没有四驱轮式机器人三维模型(stp 文件),要去哪里找免费的。(小车型号为ABOT-M1)
发表于 04-09 21:57
研华科技加速智能自主系统与机器人应用发展
研华科技近日举办“智能自主系统与机器人应用伙伴高峰论坛”,将携手生态伙伴,打造灵活且ROS兼容的机器人解决方案。
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
机器人、家用娱乐机器人,大到智能驾驶汽车、人形机器人,都是未来会并存的机器人形态。
不过,当年遵循“提高机器人软件复用率”思想开发的
发表于 03-03 14:18
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产品亮相,并联手古月居共同推出首本基于RDK

ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产品亮相,并联
发表于 12-10 10:56
•998次阅读





 工商网监
工商网监
评论