 ROS系统的本地搭建(上)
ROS系统的本地搭建(上)

有关ROS系统的相关知识已经在上一篇文章中进行了阐述,在本篇文章中,将就ROS的进一步搭建方法做阐述。
⚠️:本文中“消息代理”、“主服务器”、“Master Server”是相同的意思,可以互换。
0× 1
关于版本选择
目前稳定的ROS系统有三个版本可供选择
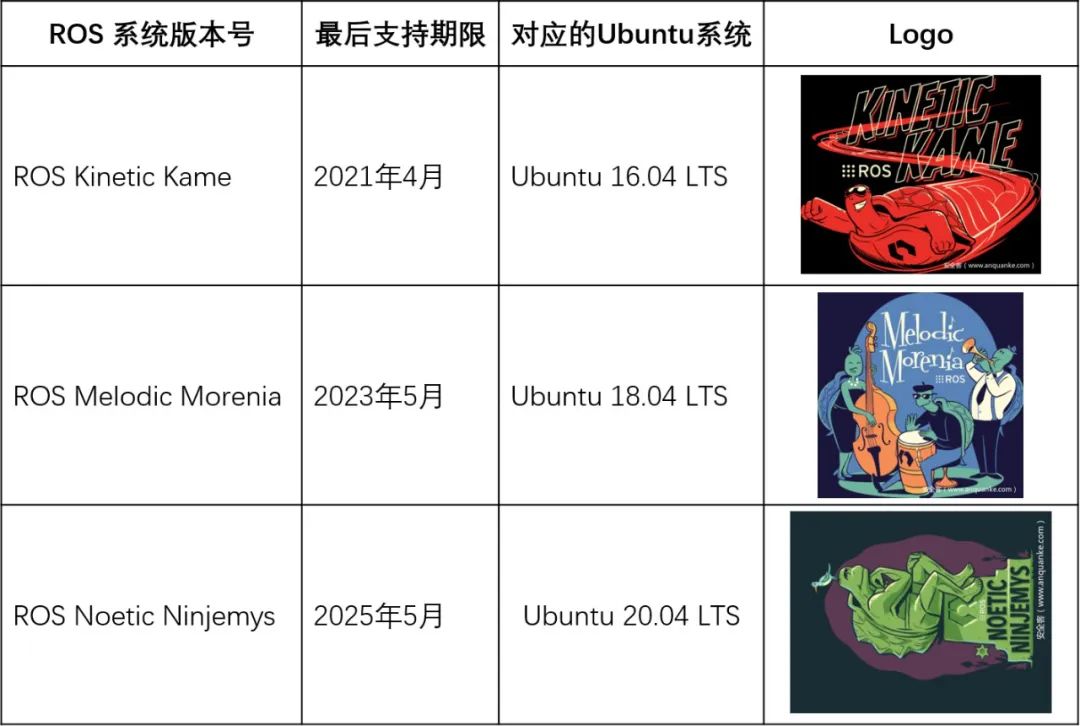
我们此处以ROS Melodic Morenia为例进行本地环境的搭建,选用Ubuntu 18.04 LTS。
⚠️:尽管实际的ROS交互并不需要任何的图形化界面,但是为了演示方便,我们此处还是选用带有用户图形界面的Desktop版本。
0× 2
本地搭建ROS环境
-
配置apt仓库
使用以下命令启用restricted、universe和multiverse存储库。
sudo add-apt-repository "deb http://archive.ubuntu.com/ubuntu $(lsb_release -sc) main universe restricted multiverse"
这里也可以换成阿狸云的存储库链接,但是必须是包含restricted、universe和multiverse的。
-
配置sources.list
使用以下命令启用ros存储库。
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.sjtug.sjtu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
这里给出一些其他的镜像源以供选择:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
物联网
+关注
关注
2951文章
48270浏览量
419671 -
服务器
+关注
关注
14文章
10447浏览量
91853 -
ROS
+关注
关注
1文章
296浏览量
18918
发布评论请先 登录
相关推荐
热点推荐
Micro-ROS:把ROS2放在MCU上
机器人的发展。 ROS便是为机器人在研发的过程中的代码复用提供支持的开源框架,大量的机器人开源项目,从感知到控制、从定位到构图、从导航到可视化,几乎都使用ROS作为基础。 Micro-ROS从何而来? Micro-
如何在ROS的基础上提升无人驾驶系统的可靠性
本文着重介绍基于机器人操作系统ROS的无人驾驶系统。文中将介绍ROS以及它在无人驾驶场景中的优缺点,并讨论如何在ROS的基础
如何搭建实体机器人ros底盘
目录介绍一、底盘主控板二、嵌入式开发板1. 与上位机pc的关系2. 与STM32主控板的关系介绍自下而上的分析实体机器人(差分轮速机器人)搭建中的关键过程。一、底盘主控板本部分搭建实体机器人ros
发表于 01-20 07:36
如何低成本搭建ARM+ROS的硬件载体?
bash,即进入命令交互进程。通过以下命令进入容器内部。进入后,可以操作容器内的命令,如下所示。通过exit命令,可退出容器,退出后容器就处于停止状态,如下所示。通过以上操作,我们就完成了硬件与底层的搭建,为ROS运行在这套开发板上
发表于 10-13 12:02
搭建ARM+ROS的硬件载体之ROS的移植及测试方法
1. 准备工作 经过前面的环境搭建,HDG2L-IoT评估套件已经能稳定地运行Ubuntu+docker环境,当前需要下载运行ROS镜像即可。 本文参考ROS官方文档《Getting
发表于 03-09 13:55
搭建ARM+ROS的硬件载体之ROS部署前的筹备工作及步骤分解
1. 方案概述 本文重点介绍低成本搭建ARM+ROS的硬件及底层实现。开发板选用HDG2L-IoT评估套件,默认配置为2G内存、8G存储,搭载可玩性极高的Ubuntu系统。 开发套件默认
发表于 03-09 14:11
本地测试环境搭建
本文主要介绍了本地测试环境搭建搭建一个本地测试环境无疑是个明智的选择,再结合GitHub、Jenkins、Docker等工具,进行持续集成、资源隔离,既可以快速的构建、部署自己的项目,

ROS系统的本地搭建(下)
有关ROS系统的相关知识已经在上一篇文章中进行了阐述,在本篇文章中,将就ROS的进一步搭建方法做阐述。
⚠️:本文中“消息代理”、“主服务器”、“Master Server”是相
实现ARM+ROS(机器人操作系统)之环境搭建!
如何低成本搭建ARM+ROS的硬件载体?上文为大家介绍了实现的思路及原理,本文将为读者实际操作,展示ROS部署前的筹备工作及步骤分解。

实现ARM+ROS(机器人操作系统)之运行ROS!
如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。

超级干货!本地搭建代码托管平台Gitea
,运行时对CPU和内存的需求较小,适用于个人或小型团队协作开发,适合在个人电脑或资源受限的服务器上使用。2Gitea的本地搭建本次搭建环境演示系统

本地电脑如何搭建云电脑,本地电脑搭建云电脑的步骤
工作中,不可避免的会用到云电脑,实现电脑连接能方便工作,局域网远程桌面控制软件能帮助管理者解决,保障信息安全;提高工作效率;降低维护成本。今天小编跟大家讲讲本地电脑搭建云电脑的步骤
使用myCobot 280机械臂结合ROS2系统搭建机械分拣站
这篇文章是来自Automatic Addison的开源项目,已获作者授权转载自github。本项目的主要内容是使用myCobot 280机械臂结合ROS2系统搭建机械分拣站。




评论