 双相机立体视觉和结构光立体视觉原理及优势对比
双相机立体视觉和结构光立体视觉原理及优势对比

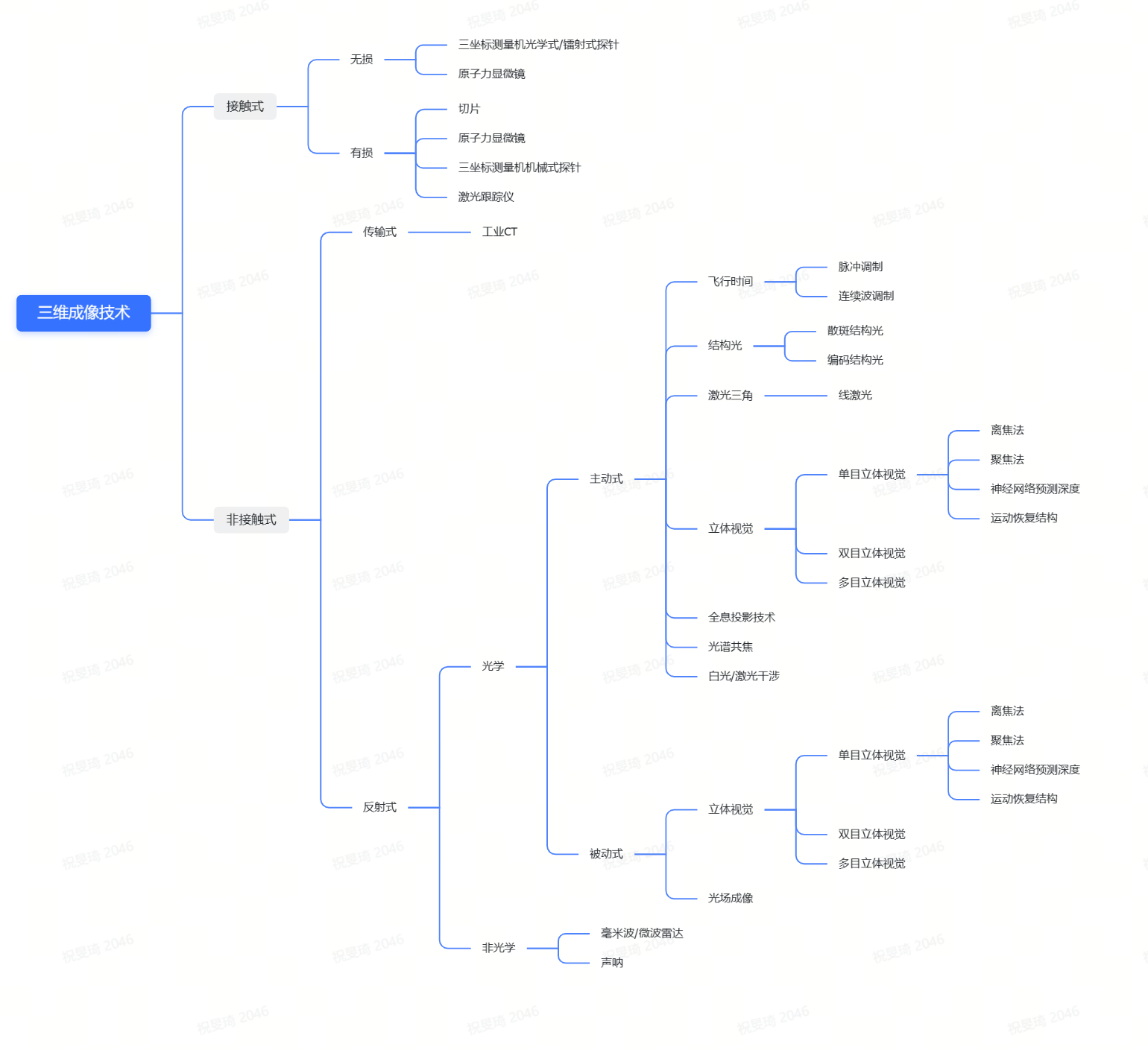
目前的深度相机根据其工作原理可以分为三种:TOF相机、双相机立体视觉、结构光投射立体视觉。
1.TOF
TOF是Time of flight的简写,直译为飞行时间的意思。所谓飞行时间法3D成像,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
TOF相机与普通机器视觉成像过程也有类似之处,都是由光源、光学部件、传感器、控制电路以及处理电路等几部单元组成。TOF相机不仅可以获取到深度信息还可以获取到图像的灰度信息,微软kinect2即是基于TOF原理的深度相机。
TOF 相机目前的主要应用领域包括:物流行业,安防和监控,工业视觉,工业定位、工业引导和体积预估;替代工位上占用大量空间的、基于红外光进行安全生产控制的设备,医疗和生物,互动娱乐等领域。
2.双相机立体视觉
双相机立体视觉指的是目前大家都在热点研究的,仅依靠双相机的视差获取深度信息的方式。双相机立体视觉相机因为非常依赖纯图像特征匹配,所以在光照较暗或者过度曝光的情况下效果都非常差,另外如果被测场景本身缺乏纹理,也很难进行特征提取和匹配。例如纯色的背景。
3.结构光投射立体视觉
结构光是通过红外IR发射端投射人眼不可见的伪随机散斑红外光点到物体上,每个伪随机散斑光点和它周围窗口内的点集在空间分布中的每个位置都是唯一且已知的。这是结构光的存储器中已经预储存了所有的数据。这些散斑投影在被观察物体上的大小和形状根据物体和相机的距离和方向而不同。拍摄到的斑点和已知斑点进行对比,然后获取到深度信息。根据三种不同的距离使用了三种不同尺寸的散斑,这样的目的是为了在远中近三种距离内都能得到相对较好的测量精度:近距离(0.8 – 1.2 m):可以获得较高的测量精度,中距离(1.2 – 2.0 m):可以获得中等的测量精度,远距离(2.0– 3.5 m):可以获得较低的测量精度。
4.三种相机对比:
外星眼机器视觉从光线要求、帧率、测量范围、功耗、测量精度等方面来给大家做下对比:
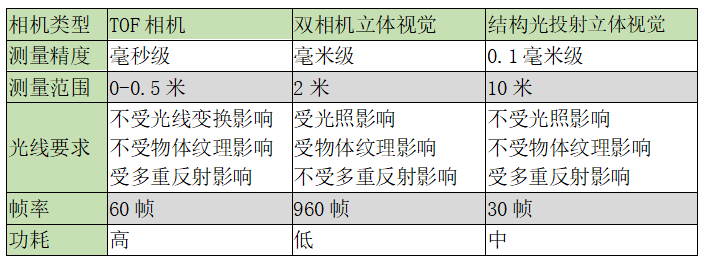
5.总结:
1.双目方案,最大的问题在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。
2.结构光方案,目的就是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的上述问题。但是,在强光下,结构光核心技术激光散斑会被淹没,因此,不合适室外。同时,在长时间监控方面,激光发射设备容易坏,重新更换设备后,需要重新标定。
3.TOF方案,传感器技术不是很成熟,因此,分辨率较低,成本高,但由于其原理与另外两种完全不同,实时性高,不需要额外增加计算资源,几乎无算法开发工作量,是未来发展的一个重要方向。
-
相机
+关注
关注
5文章
1607浏览量
56045
原文标题:深度相机—TOF、双相机立体视觉、结构光立体视觉原理及优势对比
文章出处:【微信号:UFO-VISION,微信公众号:外星眼机器视觉网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
IMX8M Plus 板上部署立体视觉模型 CPU 回退错误 IMX8M Plus问题
机器视觉工业相机与智能相机的区别

海康威视水下立体视觉摄像机助力智慧养殖
2026最火全息屏|裸眼3D全息屏凭什么出圈?室内场景适配指南

RTK-SCAM-60 双目立体视觉相机|精准深度感知 全场景智能视觉

双目立体视觉相机产品介绍

基于SD3589高精度双目立体视觉相机:助力三维感知与智能化应用
从3D传感器到立体相机,解锁工业应用新可能

智驾感知系统中立体视觉相对于LiDAR的性能优势

机器视觉三维成像技术简介(一)
双目环视立体视觉系统在智能驾驶行业的应用
iTOF技术,多样化的3D视觉应用
Bumblebee X 5GigE系列工业相机,多场景下释放工业立体视觉的无限潜力!
智能软件+硬件解决方案克服实时立体视觉中的挑战



评论