 智驾感知系统中立体视觉相对于LiDAR的性能优势
智驾感知系统中立体视觉相对于LiDAR的性能优势

引言
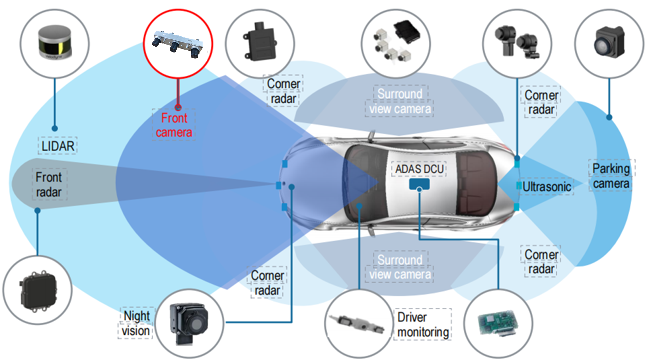
上一篇我们引用马斯克对于智驾感知的观点,以及分享了LiDAR与双目立体视觉的原理技术知识,下面我们详细介绍一下立体视觉相对于LiDAR的性能优势。
立体视觉的显著优势体现在如下几方面:
信息丰富度:纹理、颜色和语义
双目立体视觉在局部细节和纹理信息的捕捉上优于LiDAR。LiDAR生成的点云是离散的、稀疏的,其密度受扫描频率和线数限制。在低密度点云场景下,物体的表面细节(如纹理、颜色、边缘)会丢失,导致“鬼影”或“断点”现象。而双目立体视觉系统通过高分辨率摄像头(如1080p或更高)获取的图像,能够提供极其丰富的颜色、纹理和边缘信息,这是双目立体视觉最根本的优势。
1. 工作原理: 双目立体视觉通过两个摄像头模拟人眼,获取的是高分辨率的2D图像信息(RGB)而LiDAR仅能提供一个“点”或“轮廓”,无法直接提供车牌、颜色、车型甚至驾驶行为等信息。
2. 优势体现: 双目可以直接输出的是高分辨率的彩色图像。这不仅包含了深度信息,还包含了极其丰富的视觉信息,如车道线、交通标志牌的文字和颜色、信号灯状态、车辆类型、行人衣着等。这对于目标识别、分类、场景理解等高层感知任务至关重要。它不仅能够计算深度,还能同时获得每个像素点的颜色、纹理和亮度信息。
这使得它能够具有如下优势:
轻松识别和分类物体: 可以直接利用成熟的2D图像识别算法来分辨车辆、行人、交通标志、信号灯等。LiDAR只能提供3D点云,识别物体需要额外的算法,且对于没有明显3D形状的物体(如路面上的箭头、交通标志)识别困难。
更好地理解场景: 例如,能区分湿滑的路面(反光)和干燥的路面,LiDAR每个点通常只包含位置(x, y, z)和反射强度信息。它无法直接获取环境的颜色、纹理等细节。特殊场景无法做到精准识别的。
成本优势(最显著的优势)
双目立体视觉的核心优势是硬件成本极低且可规模化降本,这是LiDAR短期内难以突破的壁垒,也是其在消费级场景(如乘用车、家用机器人)中普及的关键。
硬件本质: 双目立体视觉的核心是摄像头,这是非常成熟、大批量生产的消费电子元器件,成本可以做到非常低。双目方案基于 2 台及以上普通 CMOS 摄像头,核心成本为光学镜头、图像传感器及边缘计算芯片;而LiDAR(尤其是车规级高线数 LiDAR)依赖精密光学组件(如发射端 VCSEL、接收端 SPAD)和复杂机械结构,这使得双目系统的硬件成本可以比LiDAR低一个数量级,硬件成本仅为LiDAR的1/10至1/100,适合大规模部署。
商业前景: 随着算法的优化和芯片算力的提升,一套高性能的双目立体视觉系统总成本远低于同等性能的LiDAR。这也是为什么特斯拉等公司坚持走纯视觉路线的重要原因之一——为了大规模量产和普及。规模化效应:摄像头产业链成熟(全球年出货量超百亿颗),双目方案可直接复用消费电子级供应链,量产规模越大成本下降越明显;而LiDAR仍处于产能爬坡期,核心元器件(如 1550nm 激光芯片)依赖少数厂商,规模化降本速度远慢于双目。
维护成本:双目摄像头无机械运动部件(如LiDAR的转镜、振镜),故障率低(平均无故障时间 MTBF 通常>10 万小时),后期维护仅需定期校准;LiDAR机械结构易受振动、冲击损坏,维护成本是双目方案的 3-5 倍。
无主动干扰,适用于特殊场景
被动感知: 双目立体视觉本身不发射任何信号,只是被动接收环境光,因此不存在设备间的相互干扰问题。虽然恶劣光照条件(如黑夜、强光)也不会影响其性能,但这与LiDAR的失效机制不同。
优势体现:
(1)无干扰: LiDAR:是主动式传感器,自身发射激光束,多台LiDAR之间可能会相互干扰。
(2)特殊场景: 当遇到雨、雪、雾等恶劣天气时,激光束会被吸收或散射,导致点云质量严重下降甚至失效,双目具备强大的兼容性。
(3)不受限于激光安全法规: LiDAR的发射功率受到严格限制,以避免对人眼造成伤害。
适用场景:消费级与大规模落地场景
双目立体视觉的优势使其在消费级自动驾驶、家用服务机器人、低空无人机等场景中更具竞争力,这些场景对成本敏感、需兼顾语义感知和环境适应性。
(1)乘用车自动驾驶:
面向 L2-L4 级自动驾驶,双目方案可满足城市道路、高速路的感知需求,且成本可控制在整车售价的 5% 以内(LiDAR方案通常占 10%-20%),双目更适合大规模量产;
(2)家用服务机器人:
在家庭场景中,双目可识别家具纹理、地板材质(如区分“地毯”vs“木地板”,避免机器人卡困),同时通过颜色识别定位物品(如找到红色水杯),而LiDAR仅能构建空间结构,无法满足“语义交互”需求;
(3)低空无人机:
在航拍、巡检场景中,双目可同时完成 “避障(深度估计)+ 目标识别(如识别电力线故障点)”,且低功耗特性延长无人机续航,避免LiDAR“高功耗缩短续航”的问题。
理论分辨率和探测距离
双目立体视觉模仿了人类双眼的感知方式,理论上只要能解决匹配难题,其测距能力与基线(两个相机的距离)强相关。长基线的双目系统可以实现超远距离的精确测距。
(1)分辨率: 摄像头的分辨率远高于主流LiDAR的线数(如128线、256线)如下图。理论上,双目立体视觉可以生成与摄像头分辨率同等级的深度图,提供极其稠密的深度信息。
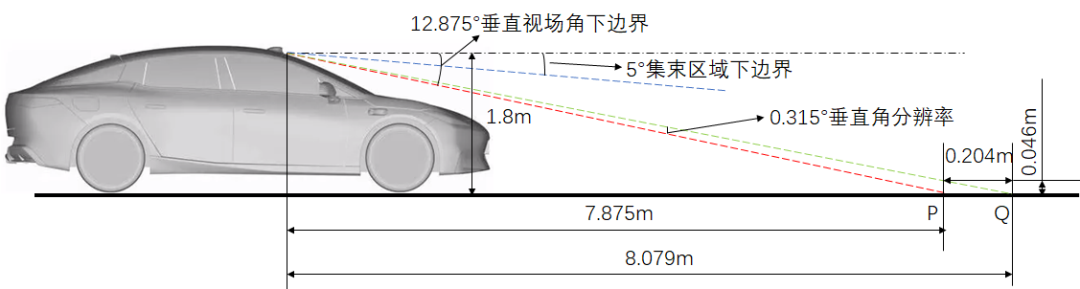
(2)探测距离: 探测距离取决于摄像头的焦距和基线(两个摄像头的距离)。通过增加基线,理论上可以实现很远的探测距离,而不像LiDAR受限于激光功率和探测器灵敏度,精度对比如下图。例如,一些天文或军事用途的超长基线双目系统可以探测数公里外的目标。

感知维度:语义信息的完整性与丰富度
双目立体视觉通过图像匹配生成深度信息的同时,可天然获取颜色、纹理、语义标签等多维度信息,这是LiDAR “点云无语义” 特性无法比拟的优势,对复杂场景决策至关重要。
(1)语义感知能力
LiDAR的点云仅包含 “距离 + 反射强度”,无法直接识别物体类别(如 “红色交通灯”“黄色警示牌”“白色斑马线”),需依赖后续算法与视觉数据融合;而双目摄像头可直接输出彩色图像,通过 AI 模型(如 CNN、Transformer)同步完成深度估计 + 目标检测 + 语义分割。
(2)场景理解精度
在结构化场景(如城市道路、停车场)中,双目可通过纹理匹配识别 “井盖、路缘石、减速带” 等小尺寸物体的语义属性;而LiDAR对低反射率物体(如黑色沥青路面的井盖)易漏检,且无法区分物体材质(如“金属护栏”vs“塑料隔离墩”),可能导致决策误判。
环境适应性:复杂天气与光照的鲁棒性
尽管LiDAR在极端天气(如暴雨、浓雾)中表现优于早期双目方案,但随着算法优化(如多帧融合、语义辅助校准),双目立体视觉在中等恶劣环境、复杂光照场景中的适应性已显著提升,且避免了LiDAR的 “固有缺陷”。
(1)对抗极端天气的独特优势
LiDAR的激光束易被雨滴、雾滴、雪花反射,导致点云出现大量噪声(如暴雨中有效点云率可能降至 50% 以下),甚至出现 “虚警”(误将雨滴识别为障碍物);而双目摄像头可通过(多光谱融合,语义辅助深度修复)来优化提升鲁棒性。
(2)复杂光照场景适配
在强光逆光(如正午太阳直射)、隧道出入口(明暗交替)场景中,LiDAR易因 “强光干扰接收端” 导致测距精度下降;而双目摄像头可通过动态曝光、HDR(高动态范围)技术平衡明暗区域,再结合图像增强算法(如 Retinex)保留纹理细节,确保深度匹配的稳定性。
系统集成:体积功耗与冗余设计灵活性
双目立体视觉的 “纯视觉” 特性使其在硬件集成、功耗控制、多传感器冗余方面具备显著优势,尤其适合对空间和能源有限制的场景(如乘用车、小型机器人)。
(1)体积与安装灵活性:
双目摄像头模组体积小(通常为巴掌大小)、重量轻(<100g),可灵活集成于车身各处(如后视镜、车顶饰条、前格栅),无需像LiDAR那样设计专用安装支架(LiDAR因体积大,常需占用车顶 “大鼓包” 空间,影响车身风阻和美观)。
(2)低功耗优势:
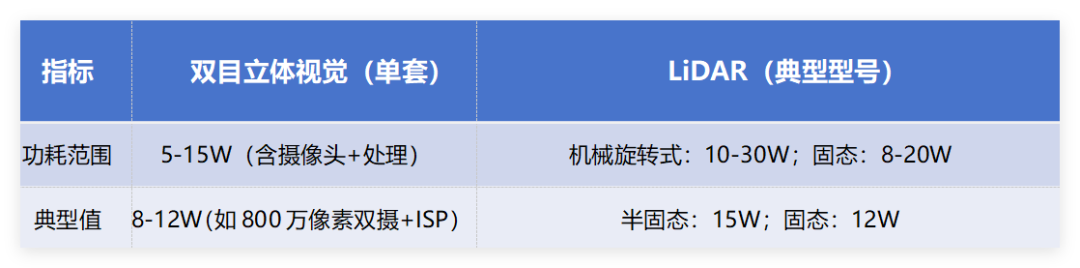
双目立体视觉基于感知,功耗主要来自传感器本身,即通过两个CMOS图像传感器,其功耗与普通手机摄像头类似,非常低(通常仅需几百毫瓦到1W左右)。
LiDAR属于主动探测,需要驱动多个激光器(线数越多,功耗通常越高),高性能LiDAR可能还需要额外的温控或散热装置,进一步增加了功耗。
典型功耗数据对比
典型功耗数据对比
(3)多视角冗余设计:
双目方案可轻松扩展为 “多目环视”(如 8 摄像头系统),通过不同视角的图像交叉验证提升感知冗余;例如特斯拉 Model 3 的 8 摄像头系统覆盖 360° 视野,任意 1 颗摄像头故障时,可通过相邻摄像头的图像插值补全深度信息;而LiDAR若需实现 360° 覆盖,需安装多个LiDAR,成本和功耗呈倍数增长。
数据利用与算法迭代效率
双目立体视觉生成的 “图像 + 深度” 数据具备高复用性,可同时支撑感知、定位、地图生成等多任务,且算法迭代速度快(可通过 OTA 升级),这是LiDAR “点云数据单一用途” 无法比拟的优势。
结语
一.成本特色
双目立体视觉的性能优势并非体现在 “绝对深度精度”(LiDAR在远距离、高精度测距上仍占优),而是在于 “成本可控前提下的语义感知完整性”—— 它以远低于LiDAR的成本,提供了 “深度 + 颜色 + 纹理 + 语义” 的多维度感知能力,同时具备灵活集成、低功耗、算法快速迭代的特性,更适合消费级、大规模落地场景。
双目立体视觉在动态物体跟踪速度、环境语义丰富度和系统集成灵活性方面具有显著优势。虽然其在绝对测距精度上可能略逊于LiDAR,但通过算法优化,其在实际应用中的感知效果已接近甚至在某些场景下超越LiDAR。例如,特斯拉(Tesla)通过其纯视觉方案,结合强大的BEV(鸟瞰图)算法和超算平台,已实现对周围环境的高精度感知,其系统在识别交通信号灯、行人、非机动车等复杂目标时表现优异,证明了视觉方案在感知精度上的巨大潜力。
随着 AI 算法(如 Transformer-based 深度估计、NeRF 神经辐射场)的持续优化,双目立体视觉在深度精度、极端天气适应性上的短板正逐步弥补,未来有望在更多场景中替代中低线数LiDAR,成为感知技术的主流选择之一。
二.视觉、雷达的“双剑合璧”
经过研究在未来视觉、雷达并非竞争关系而是“合作共赢”模式,共同打造“智驾环境感知设备”,LiDAR发挥极端光线下工作、远距离精度高的优势,立体视觉则在成本、点云数据处理、抗干扰能力强等优势发挥更大作用,同时应用于双目、三目、一体机、Adas等产品不断发挥立体视觉的优势,例如LiDAR在夜间弥补双目立体视觉的检测短板,同时视觉相机使得车辆制造成本更低、数据处理更为简单、环境的纹理、颜色等语义信息更加丰富、抗干扰能力加强。提升了车辆感知的鲁棒性,以及智驾决策的准确性。
二者强强融合,优势互补,“联手”发挥更大价值!
-
立体视觉
+关注
关注
0文章
42浏览量
10032 -
激光雷达
+关注
关注
977文章
4377浏览量
195317 -
LIDAR
+关注
关注
11文章
362浏览量
31140
原文标题:立体视觉VS激光雷达:3D智驾感知赛道,谁会更胜一筹?(下)
文章出处:【微信号:zhaoyaomojingdyh,微信公众号:中科慧眼】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
LiDAR线圈如何驱动无人驾驶技术
从3D传感器到立体相机,解锁工业应用新可能

英飞凌汽车雷达解决方案:开启高阶智驾感知新范式
立体视觉和激光雷达在3D智驾感知领域的差异分析

双目环视立体视觉系统在智能驾驶行业的应用
Bumblebee X 5GigE系列工业相机,多场景下释放工业立体视觉的无限潜力!
超声波清洗机相对于传统清洗方法有哪些优势?

自动驾驶汽车如何确保感知数据的一致性?

自动驾驶中纯视觉替代不了激光雷达?
智能软件+硬件解决方案克服实时立体视觉中的挑战





 工商网监
工商网监
评论