 瑞芯微(EASY EAI)RV1126B 人员检测方案
瑞芯微(EASY EAI)RV1126B 人员检测方案

1. 方案简介
本方案将演示如何利用EASY-EAI-Nano-TB以及MIPI-CSI摄像头制作一个【网络摄像头(IPCamera)】:两路MIPI-CSI摄像头分别单独输出两路流。
1.1 接线示意图
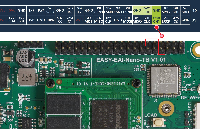
摄像头与板卡连接:
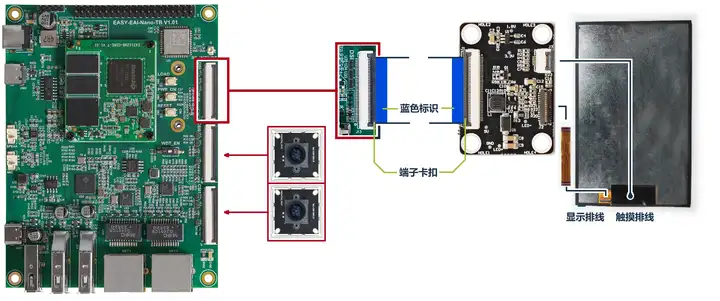

* 接线必须在断电时进行操作。
* 采用反向线连接IMX415摄像头与Cmaera1接口。(注意:用错线会烧坏摄像头或者核心板,因此在接线时务必要小心。)
* 接线端子卡扣与FPC线的蓝色塑料标识必须位于同一侧。如下图所示。
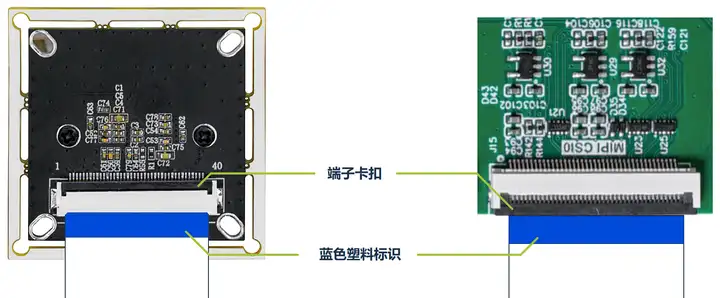
EASY EAI Nano-TB默认搭配IMX415单目摄像头。同时配有一根0.5mm间距的40pin FPC反向线。
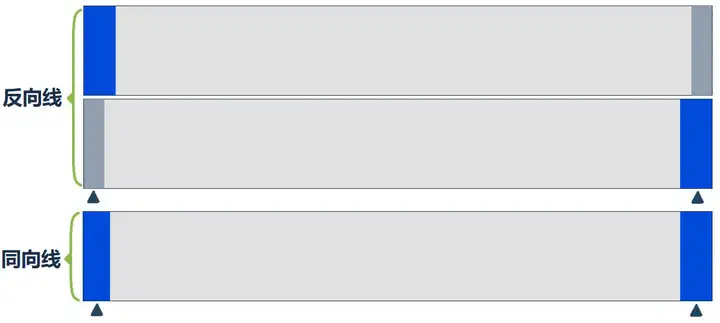
反向线:两端的蓝色标识不在同一侧面。
同向线:两端的蓝色标识处于同一侧面。
2. 快速上手
2.1 开发环境准备
如果您初次阅读此文档,请阅读《入门指南/开发环境准备/Easy-Eai编译环境准备与更新》,并按照其相关的操作,进行编译环境的部署。
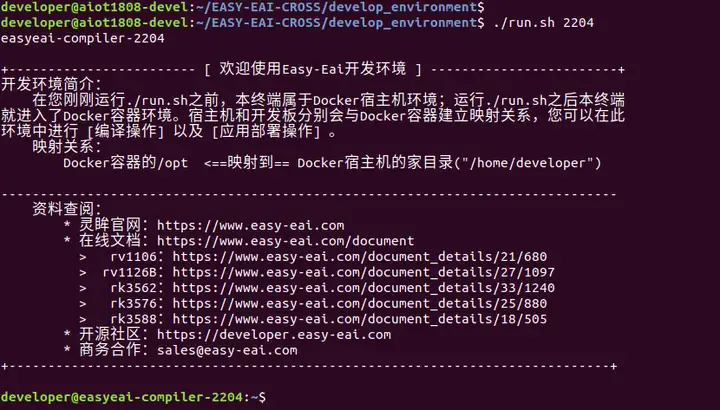
在PC端Ubuntu系统中执行run脚本,进入EASY-EAI编译环境,具体如下所示。
cd ~/develop_environment ./run.sh 2204
2.2 源码下载以及例程编译
在EASY-EAI编译环境下创建存放源码仓库的管理目录:
cd /opt mkdir EASY-EAI-Toolkit cd EASY-EAI-Toolkit
通过git工具,在管理目录内克隆远程仓库
git clone https://github.com/EASY-EAI/EASY-EAI-Toolkit-1126B.git

注:
* 此处可能会因网络原因造成卡顿,请耐心等待。
* 如果实在要在gitHub网页上下载,也要把整个仓库下载下来,不能单独下载本实例对应的目录。
进入到对应的例程目录执行编译操作,具体命令如下所示:
cd EASY-EAI-Toolkit-1126B/Solutions/detect-Person ./build.sh
注:
* 由于依赖库部署在板卡上,因此交叉编译过程中必须保持/mnt挂载。
2.3 模型部署
要想开发实例能够顺利执行,还需要先下载人员检测算法模型。
百度网盘链接为:https://pan.baidu.com/s/1ds5ffznYnhtj1S6cXvjdVg?pwd=1234 (提取码:1234 )。

同时需要把下载的人脸检测算法模型复制粘贴到Release/目录:
再执行一次编译(这次要带上cpres,代表把资源文件也拷过去板卡):
./build.sh cpres
2.4 例程运行
通过串口调试或ssh调试,进入板卡后台,定位到例程部署的位置,如下所示:
cd /userdata/Solu/detect-Person

运行例程命令如下所示。
./detect-Person 23
屏幕显示效果如下:

3. 代码解析
方案主逻辑代码位于:EASY-EAI-Toolkit-1126B/Solution/detect-Person/src/main.cpp。代码实现主要通过调用我司的easyeai-api库快速实现人员检测功能,代码主体分为主线程和算法
3.1 组件库组成
要实现人员检测功能,需要使用到easyeai-api库的以下组件,如下所示。

模组信息如下所示。

这些组件通过CMakeLists.txt编译进工程,具体请看后续章节。
3.2 逻辑框图
项目的整体逻辑框图如下所示。
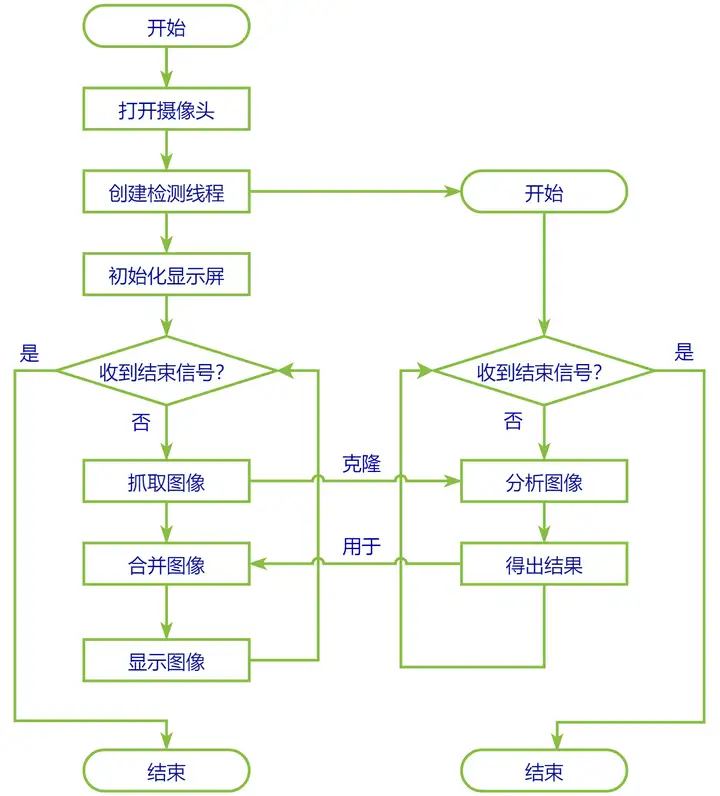
3.3 主线程
主线程处理的业务有:
l 初始化外设;
l 创建算法分析子线程;
l 抓图发送给到子线程;
l 抓图、显示;
本处附上主要的逻辑功能代码,其他辅助的、校验型的代码先忽略。
初始化显示屏,如下所示。
// 1.初始化显示屏 int width, height; if (disp_init(&width, &height) < 0) { fprintf(stderr, "DRM初始化失败\n"); return -1;
组件初始化操作如下,本处调用mipi摄像头。
// 2.打开摄像头 #define CAMERA_WIDTH 1920 #define CAMERA_HEIGHT 1080 #define IMGRATIO 3 #define IMAGE_SIZE (CAMERA_WIDTH*CAMERA_HEIGHT*IMGRATIO) int cameraIndex = atoi(argv[1]); ret = mipicamera_init(cameraIndex, CAMERA_WIDTH, CAMERA_HEIGHT, 0); if (ret) { printf("error: %s, %d\n", __func__, __LINE__); goto exit3; } pbuf = (char *)malloc(IMAGE_SIZE); if (!pbuf) { printf("error: %s, %d\n", __func__, __LINE__); ret = -1; goto exit2; }
创建线程斥锁以及线程,如下所示。
// 3.创建识别线程,以及图像互斥锁 pthread_mutex_init(&img_lock, NULL); pResult = (Result_t *)malloc(sizeof(Result_t)); memset(pResult, 0, sizeof(Result_t)); if(0 != CreateNormalThread(detect_thread_entry, pResult, &mTid)){ free(pResult); }
抓取图像,调用clone操作。
// 4.1、取流 pthread_mutex_lock(&img_lock); ret = mipicamera_getframe(cameraIndex, pbuf); if(ret) { printf("error: %s, %d\n", __func__, __LINE__); pthread_mutex_unlock(&img_lock); continue; } algorithm_image = Mat(CAMERA_HEIGHT, CAMERA_WIDTH, CV_8UC3, pbuf); image = algorithm_image.clone(); pthread_mutex_unlock(&img_lock);
调用显示图像,将分析的目标位置通过Result标记出来。
// 4.2、显示 char text[256]; for (int i = 0; i < Result.algoRes[0].resNumber; i++) { detect_result_t *det_result = &(Result.algoRes[0].detect_Group.results[i]); if( det_result->prop < 0.4) { continue; } // 标出识别目标框 sprintf(text, "%s %.1f%%", det_result->name, det_result->prop * 100); printf("%s @ (%d %d %d %d) %f\n", det_result->name, det_result->box.left, det_result->box.top, det_result->box.right, det_result->box.bottom, det_result->prop); int x1 = det_result->box.left; int y1 = det_result->box.top; int x2 = det_result->box.right; int y2 = det_result->box.bottom; // 标出识别目标定位标记 /* rectangle(image, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(255, 0, 0, 255), 3); putText(image, text, cv::Point(x1, y1 + 12), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0)); */ plot_one_box(image, x1, x2, y1, y2, text, i%10); } disp_commit(image.data, CAMERA_WIDTH, CAMERA_HEIGHT, HAL_TRANSFORM_ROT_270);
3.4 算法分析子线程
算法分析子线程,主要完成以下操作:
l 延时监测是否图像缓冲区是否为空;
l 不为空时,证明主函数已发送图像数据过来,线程执行图像获取操作;
l 调用人员分析函数;
l 记录目标框的数据,用于后续图像合成操作;
延时监测是否有图像,操作如下所示。
if(algorithm_image.empty()) { usleep(5); continue; }
获取图像操作如下所示。
pthread_mutex_lock(&img_lock); image = algorithm_image.clone(); pthread_mutex_unlock(&img_lock);
调用人员检测函数,算法得到的目标结果记录于pResult的algoRes[0]成员内,如下所示。
// 算法分析 ret = person_detect_run(ctx, image, &pResult->algoRes[0].detect_Group);
4. 开发指南
4.1 Toolkit仓库介绍
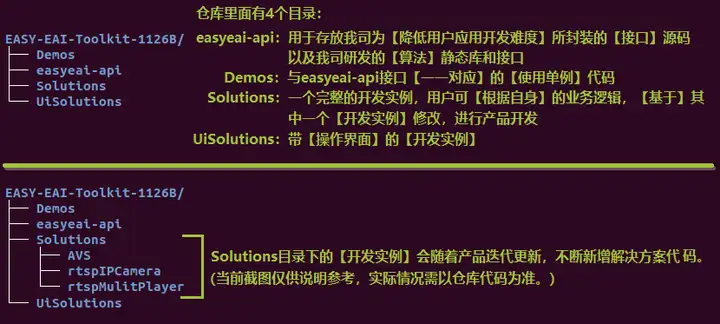
4.2 示例文件&目录结构
4.2.1 开发实例介绍
每个开发实例就是一个独立的项目,项目使用cmake构建自动编译部署。一个最简单的项目至少要包含以下元素:build.sh、CMakeLists.txt、main.c,如下所示。
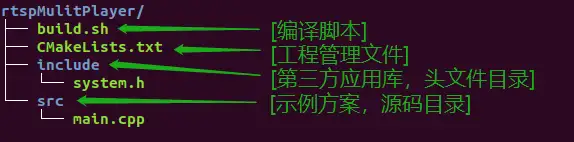
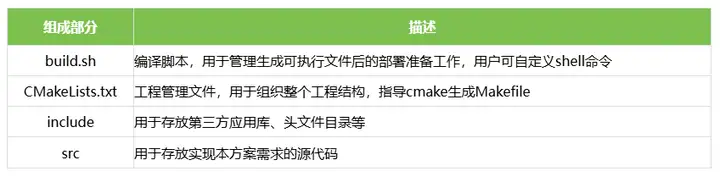
具体介绍如下所示。
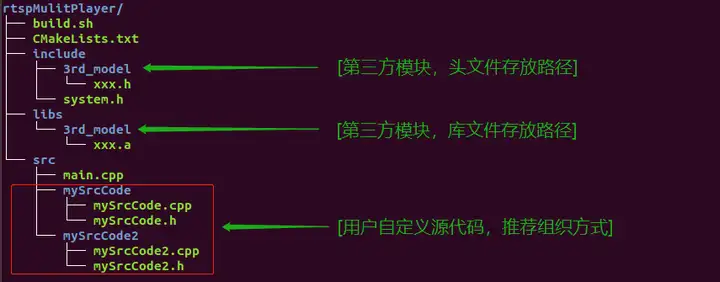
4.2.2 可拓展的目录
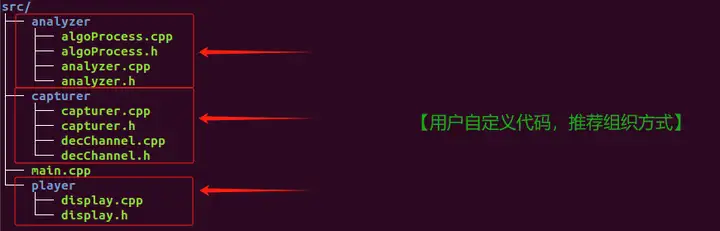
可拓展的目录是指:开发过程中增加某些功能模块,功能代码。增加模式分为两种:
l 增加已编译的第三方库,在include、libs目录内添加头文件和库文件;
l 增加用户自定义的功能模块,推荐在src目录内增加;
具体情况如下所示,第三方模块相关的文件由include/3rd_model/xxx.h、libs/3rd_model/xxx.a。自定义的功能模块为src/mySrcCode、src/mySrcCode2。
4.3 CMakeLists.txt文件解析
4.3.1 编译环境配置部分:
第一部分为配置部分,配置部分如下所示。(获取当前方案目录、配置工具链、提取方案名称):
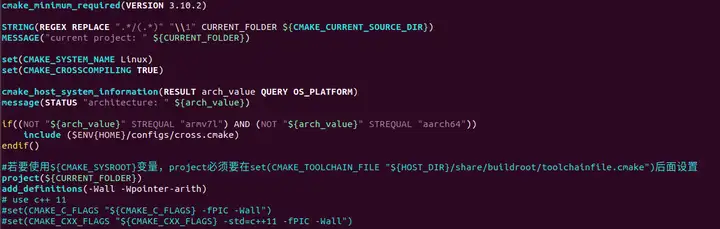
配置信息如下所示。
4.3.2 easyeai-api配置部分
第二部分是引入我司的功能组件库(针对当前方案进行:配置EASY EAI API头文件目录${XXX_INCLUDE_DIRS}、源码文件目录${XXX_SOURCE_DIRS}以及所依赖的库参数${XXX_LIBS}):
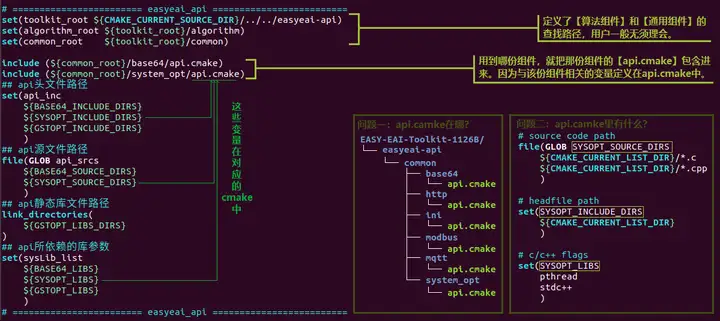
配置信息如下所示。

4.3.3 第三方库配置部分
第三部分配置第三方的库(针对当前方案进行:配置第三方头文件目录、库文件目录、配置第三方库链接参数以及配置源码目录):
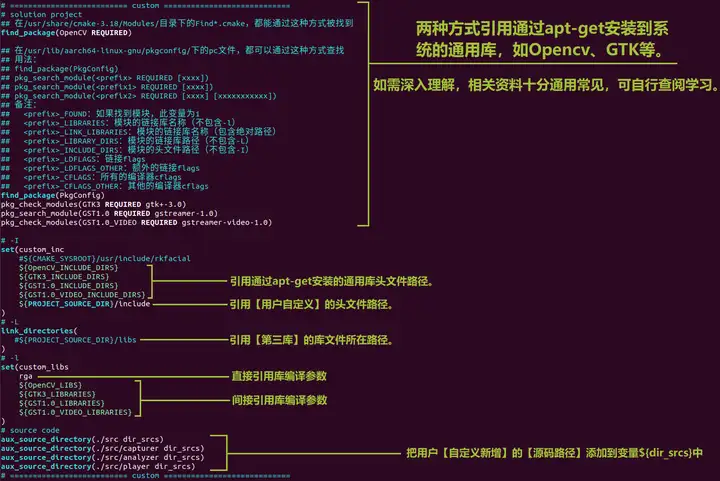
配置信息如下所示。
例如添加个人库的目录组成方式如下所示。
aux_source_directory的修改方式为:
aux_source_directory(./src ./src/mySrcCode ./src/mySrcCode2 dir_srcs)
或
aux_source_directory(./src dir_srcs) aux_source_directory(./src/mySrcCode dir_srcs) aux_source_directory(./src/mySrcCode2 dir_srcs)
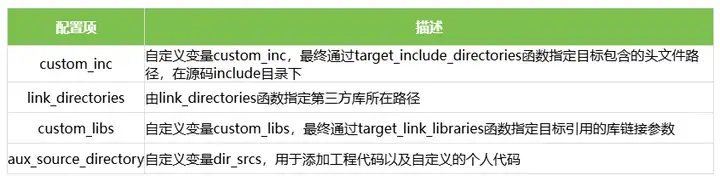
4.3.4 本方案配置部分
第四部分配置项目的编译信息,内容如下所示:

配置项如下所示。
4.4 build.sh编译脚本:
4.4.1 路径定位部分
第一部分用于提取目录用于编译操作,内容如下所示:(进入build.sh脚本所在目录,并且提取当前目录绝对路径,提取当前目录名称)

4.4.2 清除编译部分
第二部分清除操作,清除目录为build、Release,内容如下所示:(执行build.sh脚本时,带入了参数“clear”,则清空编译输出)

4.4.3 编译操作
第三部分,编译直接调用cmake,内容如下所示:(重新编译,成部署目录,并把资源自动部署进板卡)


-
人工智能
+关注
关注
1819文章
50290浏览量
266828 -
开发板
+关注
关注
26文章
6405浏览量
120542 -
瑞芯微
+关注
关注
27文章
841浏览量
54647 -
EASY-EAI灵眸科技
+关注
关注
4文章
95浏览量
3720 -
RV1126B
+关注
关注
0文章
83浏览量
240
发布评论请先 登录
瑞芯微(EASY EAI)RV1126B 音频输入

瑞芯微(EASY EAI)RV1126B PWM使用
瑞芯微(EASY EAI)RV1126B 音频输出

【EASY EAI Nano-TB(RV1126B)开发板试用】+初识篇
【EASY EAI Nano-TB(RV1126B)开发板试用】命令行功能测试-shell脚本进行IO控制-灯闪
【EASY EAI Nano-TB(RV1126B)开发板试用】命令行功能测试-shell脚本进行IO控制-红绿灯项目
【EASY EAI Nano-TB(RV1126B)开发板试用】命令行功能测试-shell脚本进行IO控制-红绿灯按钮项目
【EASY EAI Nano-TB(RV1126B)开发板试用】+1、开箱上电
【EASY EAI Nano-TB(RV1126B)开发板试用】介绍、系统安装
RV1126系列选型指南:从RV1126到RV1126B,一文看懂升级差异

【免费试用】EASY EAI Nano-TB(RV1126B)开发套件评测

瑞芯微RV1126B特性概述
替代升级实锤!实测RV1126B,CPU性能吊打RV1126

瑞芯微(EASY EAI)RV1126B 人员检测使用
瑞芯微(EASY EAI)RV1126B 人体关键点识别



评论