 基于纳芯微 MT 系列磁编码器的硬件接线规范与图解
基于纳芯微 MT 系列磁编码器的硬件接线规范与图解

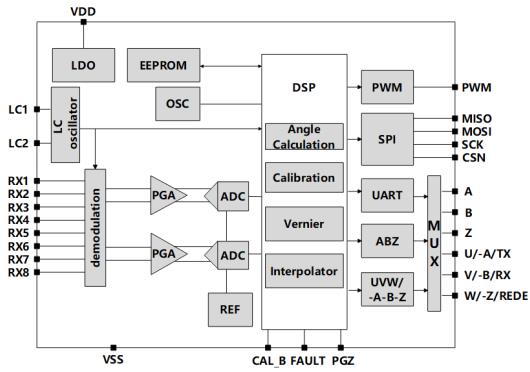
纳芯微 MT 系列(MT6835/MT6826S/MT6825/MT6816 等)AMR 磁编码器具备 SPI、ABZ(ABI)、UVW、PWM、模拟电压 多模式输出能力,广泛用于 BLDC 散热风扇、伺服电机、机器人关节等场景。其硬件接线直接影响角度精度、抗干扰能力与系统稳定性。
本文以 工程可落地 为目标,给出统一的 供电接地规范、模式接线定义、典型接线图、PCB 布线规则、电机系统共地与抗干扰设计 ,形成一套可直接用于原理图与 PCB 设计的标准化接线方案。
一、通用硬件规范(所有模式必须遵守)
1.1 供电与去耦规范
- 工作电压: 3.3V / 5V (以芯片型号为准)
- 推荐在编码器 VCC 引脚 ≤2mm 范围内 放置:
- 0.1μF 陶瓷电容(高频退耦)
- 1μF 陶瓷电容(储能稳压)
- 禁止编码器电源与电机驱动电源直接共线,避免开关噪声串扰。
1.2 接地规范(核心)
- 编码器 GND 为 信号地(SGND) ,必须与 MCU 地单点连接。
- 电机功率地(PGND)与信号地通过 单点共地 连接,避免地环流。
- 布线时编码器区域独立铺地,不与功率回路交叉。
1.3 模式配置引脚 CFGx 接线规则
MT68xx 通常使用 CFG0 / CFG1 配置输出模式:
- 上拉 → 接 VCC via 10kΩ
- 下拉 → 接 GND via 10kΩ
- 设计建议:预留 10kΩ 0Ω 电阻焊盘 ,支持产线灵活切换模式。
> 不建议悬空 CFGx,易受干扰导致模式跳变。
二、5 种输出模式接线定义与标准图解
2.1 UVW 模式(BLDC 风扇/电机最常用)
用途
直接输出类霍尔信号,用于 BLDC 六步换向,替代 3 个分立霍尔。
引脚定义
- U、V、W:磁极位置方波输出
- Z:可选索引信号
标准接线图
MT68xx MCU/驱动板
U ←────────→ HALL_U
V ←────────→ HALL_V
W ←────────→ HALL_W
GND ←────────→ SGND
VCC ←────────→ 3.3V/5V
CFG0 ←────────→ GND (配置 UVW 模式)
规范要点
- UVW 每条线串联 22~47Ω 阻尼电阻 ,抑制 EMI。
- 布线远离三相电机线,间距 ≥3 倍线宽。
2.2 ABZ / ABI 增量模式(伺服/测速)
用途
高精度转速闭环、位置闭环控制。
标准接线(单端)
MT68xx MCU/驱动器
A ←────────→ CHA
B ←────────→ CHB
Z ←────────→ INDEX
GND ←────────→ GND
VCC ←────────→ 3.3V/5V
差分接线(长距离/强干扰)
若芯片支持差分 A+/A−、B+/B−:
- 差分对线 等长、平行、包地
- 末端并联 120Ω 匹配电阻
2.3 SPI 模式(高精度角度读取/调试)
用途
读取绝对角度、芯片配置、温度、状态。
标准 4 线 SPI 接线
MT68xx MCU
CSB ←────────→ NSS
CLK ←────────→ SCK
DO ←────────→ MISO
DI ←────────→ MOSI (可选)
GND ←────────→ GND
VCC ←────────→ 3.3V
规范要点
- SPI 时钟建议 ≤10MHz
- 等长布线,长度 ≤5cm
- CLK 串 22~33Ω 抑制反射
2.4 PWM 输出模式(简易角度/风扇调速)
用途
单根线输出角度对应的 PWM 占空比。
MT68xx MCU/比较器
PWM ←──────→ GPIO/ADC
GND ←──────→ GND
- 频率典型:1kHz / 10kHz
- 占空比 0%~100% → 0°~360°
2.5 Analog 模拟输出模式(0.5~4.5V)
MT68xx MCU ADC
ANA ←──────→ ADC_IN
GND ←──────→ GND
适用老系统改造,无需串行协议。
三、多模式复用接线规范(工程主流方案)
MT 系列支持 多模式同时输出 ,因此可设计兼容接口:
3.1 散热风扇驱动板典型复用方案
UVW + SPI
- UVW 负责电机换向
- SPI 用于调试、读角度、读转速、读温度
标准复用接线
MT68xx 驱动板
U ←─────→ HALL_U
V ←─────→ HALL_V
W ←─────→ HALL_W
CSB ←─────→ NSS
CLK ←─────→ SCK
DO ←─────→ MISO
VCC ←─────→ 3.3V
GND ←─────→ SGND
CFG0 ←─────→ GND (UVW 模式)
设计规范
- 不同模式信号之间 不共线、不跨功率区
- 每个信号串 0Ω 电阻,便于断开测试
四、磁铁与安装机械规范(影响接线稳定性)
4.1 磁铁要求
- 径向充磁圆形磁铁
- 磁场强度: 30~1000mT
- 推荐直径 6~20mm
4.2 安装间隙
- 推荐气隙: 0.5~1.5mm
- 偏心误差 ≤0.5mm
- 倾斜角度 <5°
> 机械安装偏差会导致角度噪声,与接线规范同等重要。
五、PCB 布线强制规范(高抗干扰)
1. 编码器区域独立铺地 ,不与功率地混布
2. 电机相线、三相桥走线 远离编码器信号
3. UVW/ABZ/SPI 信号走 短线 ,长度 <5cm
4. 关键信号包地处理,两侧加地过孔
5. 所有输出信号线串联 22~47Ω 串联阻尼电阻
6. 禁止在编码器下方走功率回路
7. 屏蔽线使用时 单端接地 ,避免地环路
六、典型系统整体接线图(BLDC 风扇驱动)
[12V/24V 输入]
|
├─→ 驱动电源 (PGND)
└─→ LDO → 3.3V → 编码器与 MCU (SGND)
[MCU]
|── PWM → 栅极驱动 → 三相桥 → 电机线圈
|
|── UVW ←────── MT68xx 磁编码器
|── SPI ←───┘
共地结构(必须遵守)
PGND ──┬─── SGND
│
GND 点(单点共地)
七、故障排查与接线常见错误
1. 角度跳变 :CFG 悬空、地环路、SPI 时钟过高
2. UVW 换向不准 :共地不良、电机线干扰
3. 无输出 :VCC 无去耦、GND 虚接
4. SPI 读不到数据 :接线错位、电平不匹配
5. 噪声大 :未串联阻尼电阻、布线过长
八、总结
纳芯微 MT 系列磁编码器硬件接线的核心原则:
1. 供电干净、去耦就近
2. 信号地与功率地单点共地
3. 多模式复用但不混线
4. 所有信号阻尼电阻 + 短布线 + 包地
5. UVW 优先用于风扇换向,SPI 用于调试监控
遵循以上规范,可实现 低噪声、高精度、高抗干扰、超稳定 的磁编码角度采集系统,尤其适合 BLDC 散热风扇、伺服驱动与工业电机控制场景。
审核编辑 黄宇
-
磁编码器
+关注
关注
0文章
139浏览量
6688 -
纳芯微
+关注
关注
3文章
442浏览量
16226
发布评论请先 登录
基于单芯片架构的纳芯微磁编码器: 技术路线对比与电机适配
纳芯微 MT6835 磁编码器的高精度校准技术与电机闭环控制应用
纳芯微磁编码器全角度误差建模与自适应校准
从 ±1° 到 ±0.01°:纳芯微霍尔/AMR/TMR 磁编码器精度体系解析
纳芯微磁编码器:磁电转换与高精度角度解析原理深度解析
纳芯微推出MT6901双码道游标算法电感编码器芯片

磁编码器接口定义及标准接线方法
磁编码器接口定义及标准接线方法
基于 MT6816 的磁编码器系统调试与参数优化
纳芯微传感新品:MT6901电感编码器深度解析



评论