 基于 MCU 的扫地机器人驱动板开发与应用
基于 MCU 的扫地机器人驱动板开发与应用

扫地机器人的自主移动与作业性能,核心依赖驱动板的精准控制能力。MCU(微控制单元)作为驱动板的 “运算核心”,承担着指令解析、电机驱动、传感反馈处理、安全保护等关键任务,其选型与编程直接决定驱动板的响应速度、控制精度与稳定性。
本文以主流两轮差速扫地机器人为研究对象,详细介绍基于 MCU 的驱动板开发流程,包括硬件架构设计、软件算法实现及实际应用验证,为智能家居硬件开发提供技术参考。
二、驱动板硬件开发:MCU 为核心的架构设计
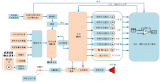
驱动板硬件开发遵循 “高集成、低功耗、抗干扰” 原则,以 MCU 为核心搭建 “主控 - 驱动 - 传感 - 电源” 四层架构,确保各模块协同高效工作。
(一)MCU 选型与核心配置
结合扫地机器人驱动需求,还要选型主控芯片,其核心优势的:
内核性能:ARM Cortex-M0 + 架构,主频 64MHz,支持单周期乘法运算,满足实时 PID 控制需求;
存储与外设:128KB Flash+36KB RAM,集成 2 个 12 位 ADC、4 个通用定时器、2 个 UART、1 个 I2C 接口,适配多传感器数据采集与通信需求;
功耗与可靠性:工作电压 2.0V~3.6V,待机功耗低至 0.5μA,支持 - 40℃~85℃宽温工作,适配复杂环境。
MCU 外围电路设计重点:
电源电路:通过将 5V 转换为 3.3V,为 MCU 提供稳定供电,搭配 100nF 陶瓷电容与 10μF 电解电容抑制纹波;
时钟与复位:采用 8MHz 外部晶振,配合片内 PLL 倍频至 64MHz,配置独立看门狗(IWDG)防止程序跑飞;
通信接口:UART1(波特率 115200bps)连接导航板,UART2 预留扩展接口,I2C 接口对接姿态传感器。
(二)核心硬件模块开发
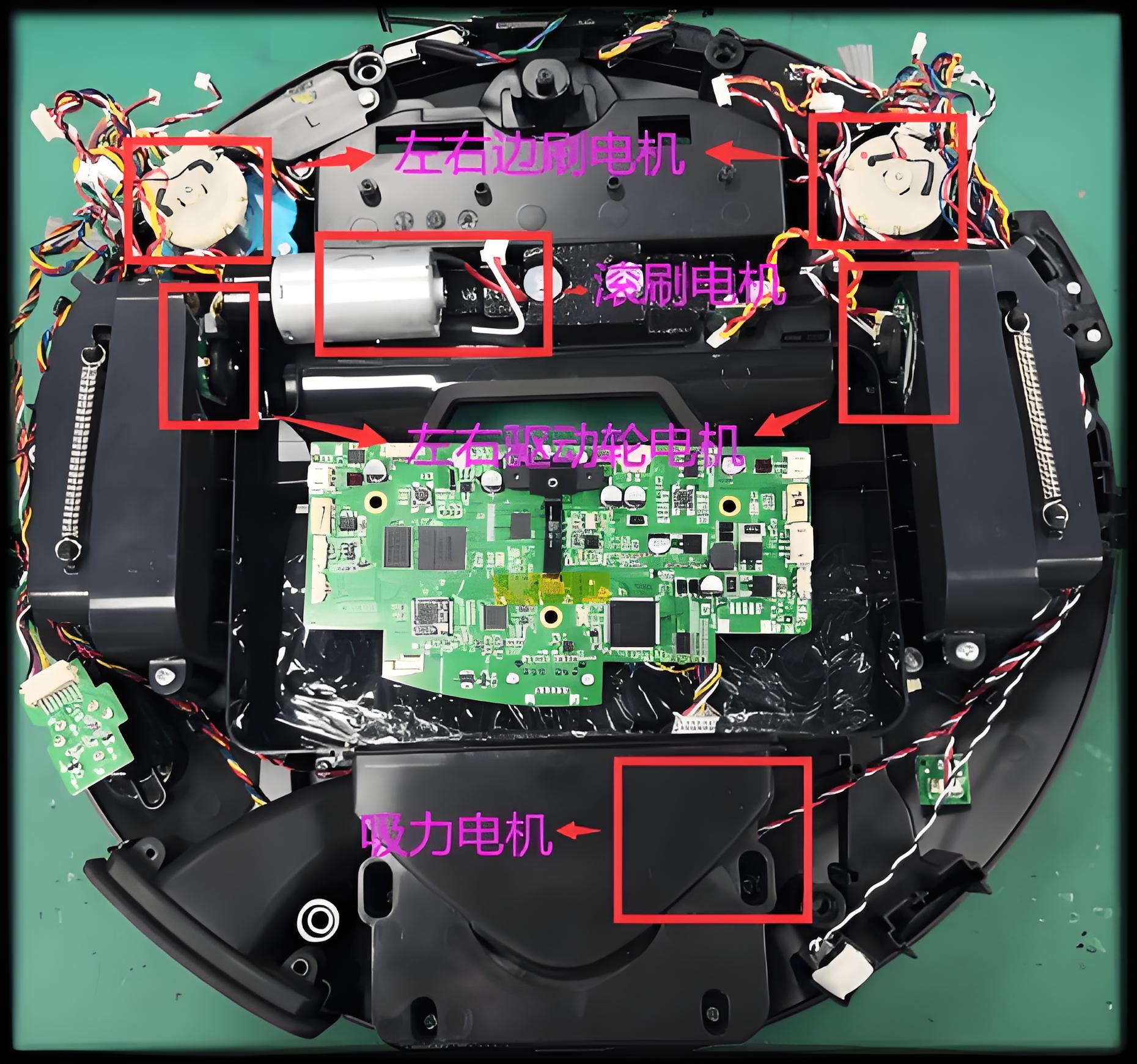
电机驱动模块:选用集成预驱功能的艾毕胜的瑞盟芯片,支持双路 H 桥驱动,适配 12V/18V 无刷直流电机(BLDC)。MCU 通过 PWM 信号控制电机转速,频率设置为 25kHz,死区时间 2μs,避免上下桥臂直通。功率输出端采用 AO3400 MOS 管,导通电阻≤80mΩ,降低导通损耗,搭配 RC 吸收回路(100Ω+10nF)抑制关断尖峰。
传感反馈模块:
转速反馈:采用 1000 线 ABZ 增量编码器,通过 MCU 定时器捕获脉冲信号,计算电机转速与行走距离,误差≤2%;
电流检测:在电机回路串联 10mΩ 采样电阻,经 LMV358 运算放大器放大后输入 ADC,实现过流保护(阈值 2.5A)与负载监测;
姿态感知:通过 I2C 接口连接 MPU6050 六轴 IMU,采集角速度与加速度数据,补偿编码器累计误差。
电源管理模块:采用纳芯微电子 降压芯片将 14.4V 电池电压转换为 5V,输出电流 3A,效率≥90%;搭配 DW01 + 电池保护芯片,实现过充、过放、短路保护,保障续航与安全。
(三)PCB 设计与抗干扰优化
PCB 布局遵循 “功率与信号分离” 原则:
功率回路(电机驱动、MOS 管)采用宽铜箔(≥2mm),缩短电流路径;信号回路(MCU、传感器)远离功率器件,减少电磁干扰;
接地设计:模拟地与数字地通过 0Ω 电阻单点连接,电流采样电阻靠近 MOS 管放置,降低地电位差;
滤波设计:电源输入端配置 π 型滤波(10μH 电感 + 100μF 电解电容 + 0.1μF 陶瓷电容),编码器信号端串联 100Ω 电阻抑制反射。
三、驱动板软件实现:基于 MCU 的控制算法开发
软件开发基于 FreeRTOS 实时操作系统,采用分层架构设计,实现 “指令解析 - 运动控制 - 反馈调整 - 安全保护” 的闭环逻辑。
(一)软件架构分层
底层驱动层:封装 MCU 外设驱动,包括 GPIO、TIM、ADC、UART、I2C 等模块,提供标准化接口函数,降低上层开发复杂度;
算法层:核心算法包括差速转向控制、PID 速度闭环、姿态解算、安全保护逻辑,是实现精准运动的关键;
应用层:处理导航板指令、状态上报、模式切换等业务,任务优先级排序为:故障保护>转速闭环>指令接收>状态上报。
(二)核心算法实现
指令解析与运动学建模:MCU 通过 UART 接收导航板下发的目标速度(0-0.5m/s)、转向角度(-180°~+180°)等指令,基于两轮差速模型分解为左右轮目标转速:
直行:(V_L = V_R = V_{target})
转向:(V_L = V_{target} times (1 - frac{Deltatheta times W}{2pi R})),(V_R = V_{target} times (1 + frac{Deltatheta times W}{2pi R}))
其中(W)为轮距(300mm),(R)为转向半径。
PID 速度闭环控制:采用增量式 PID 算法,实时修正电机转速偏差:
(Delta U(k) = K_P[e(k)-e(k-1)] + K_I e(k) + K_D[e(k)-2e(k-1)+e(k-2)])
经实验整定参数(K_P=0.7)、(K_I=0.15)、(K_D=0.08),转速波动率控制在 ±3% 以内,确保匀速行走。
姿态解算与误差补偿:通过卡尔曼滤波融合 IMU 的角速度与加速度数据,解算机器人姿态角,补偿编码器累计误差,将转向精度提升至 ±1° 以内。
安全保护逻辑:
堵转保护:电机电流超 2.5A 且持续 0.5s,立即关闭 PWM 输出,延时 1s 后尝试反向脱困;
过温保护:通过 NTC 传感器监测 MOS 管温度,超 85℃时降额运行,超 95℃停机;
欠压保护:电池电压低于 10.8V 时,触发低电量预警并停止作业。
四、开发验证与实际应用
(一)功能与性能测试
搭建测试平台验证驱动板性能,测试结果如下:
速度控制:0.05-0.5m/s 可调,稳态误差≤±0.02m/s;
转向精度:原地旋转 360°,角度偏差≤±0.9°;
响应速度:指令接收至电机启动延迟≤8ms;
续航能力:14.4V/5000mAh 电池,持续运行时间≥2.5 小时;
环境适应性:-10℃~60℃工作正常,抗 5000V 静电干扰。
(二)实际应用场景
该驱动板已成功应用于家用扫地机器人产品,适配以下场景:
日常清洁:通过精准差速转向实现全屋覆盖清扫,直线行走偏差≤2cm/m;
复杂地形:自适应地毯、地板等不同地面,通过电流反馈调整电机功率,爬坡角度≥15°;
智能交互:支持通过 APP 设置清洁模式(沿边、定点、全屋),驱动板实时响应模式切换指令;
故障自诊断:出现堵转、过温等故障时,通过 UART 上报故障信息,便于用户排查。
基于MCU 的智能扫地机器人驱动板开发,核心在于硬件架构的模块化设计与软件算法的闭环优化。STM32 系列 MCU 凭借高性价比、丰富外设与低功耗特性,成为驱动板的理想主控选择,其强大的运算能力支撑了 PID 控制、姿态解算等复杂算法的实时运行。实际应用表明,该驱动板在控制精度、稳定性与功耗方面均满足设计要求,适配家用扫地机器人的复杂作业场景。
随着 MCU 集成度的提升与 AI 算法的融入,驱动板将实现更智能的自适应控制,例如基于地面材质自动调整电机功率、通过视觉与 IMU 融合提升定位精度,进一步推动扫地机器人向 “更高效、更智能、更可靠” 方向发展。
审核编辑 黄宇
-
mcu
+关注
关注
147文章
19126浏览量
403707 -
机器人
+关注
关注
213文章
31438浏览量
223618
发布评论请先 登录
扫地机器人“叛变”了
扫地机无感 BLDC 驱动板:核心架构、控制算法与工程实现

扫地机器人 BLDC 驱动板 核心架构、控制原理与工程方案
基于 BLDC/PWM 的扫地机器人行走电机驱动板电路原理与故障保护
RTC实时时钟:实现智能扫地机器人精准作业与定时

智能扫地机器人驱动板接口定义与调试方法-技术性篇(艾毕胜电子)
扫地机器人驱动板系统设计与功能实现-艾毕胜电子
解锁扫地机器人“类人智能”的时钟密钥

INDEMIND脏污识别技术赋能扫地机器人功能进化
扫地机器人的几种语音控制芯片方案介绍
基于上海贝岭产品的扫地机器人应用方案
中微半导扫地机器人解决方案介绍




评论