 灵巧手何以灵巧?晶振必不可少!
灵巧手何以灵巧?晶振必不可少!

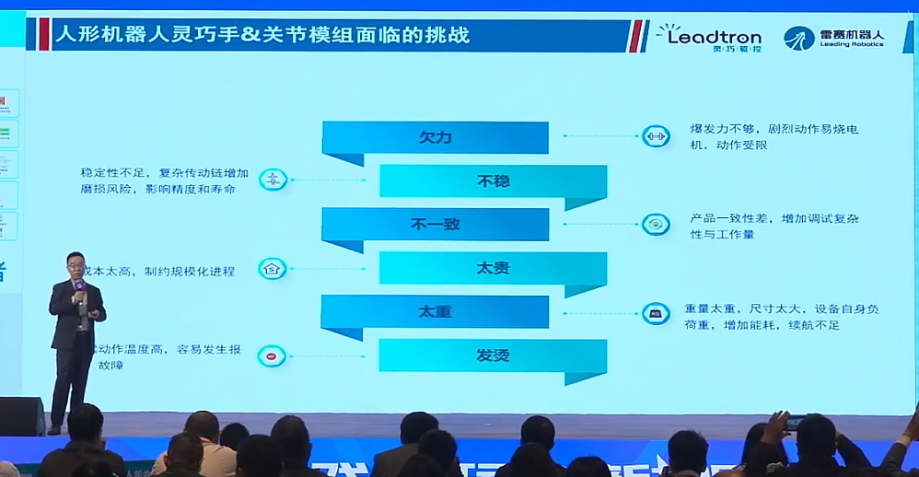
当我们惊叹于机器人灵巧手能够精准抓取鸡蛋、灵活操作工具甚至进行微创手术时,往往会将功劳归于其精巧的机械结构、强大的人工智能算法或是灵敏的传感器。然而,在这些可见的“肌肉”与“大脑”背后,一个微小到常被忽视的元件,正默默地协调着一切,确保整个系统精准、稳定地运行,它就是——晶振。
这个在电路板上看似不起眼的银色方块,其核心功能是产生一个高度稳定且精确的时钟频率信号。这个信号,就是所有数字电路的“心跳”与“节拍器”。在由微处理器、传感器和通信总线构成的复杂系统中,每一个指令的执行、每一次数据的采集、每一次信号的传输,都必须严格遵循这个统一的节拍。失去了精准的时钟,再强大的算力也会变得混乱无序。
那么,这个“节拍器”是如何具体赋能灵巧手,成就其“灵巧”之名的呢?
精准运动控制的基石:协调肌肉的“神经”
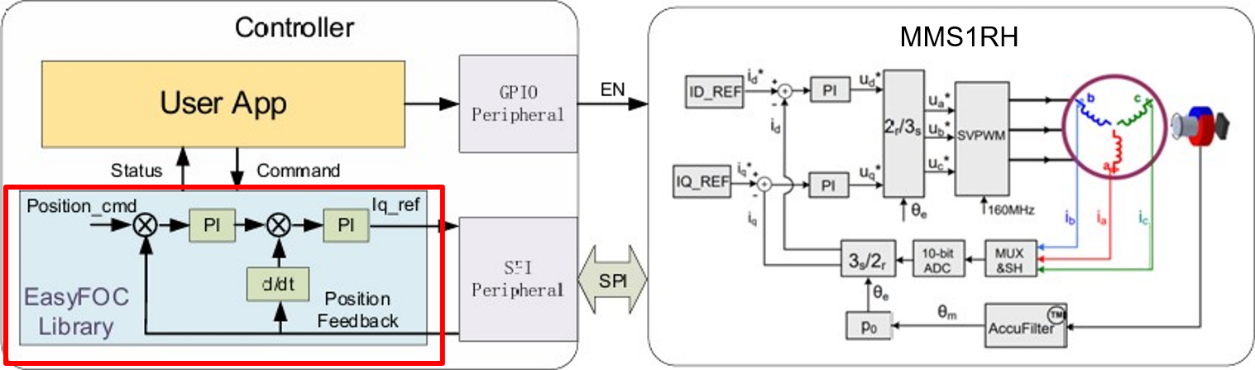
灵巧手的每个关节都由微型伺服电机驱动,而控制电机的核心是PWM(脉冲宽度调制)信号。PWM波的频率和占空比直接决定了电机的转动速度与输出力矩。这个关键的PWM信号,正是由主控制器内部的定时器产生的,而定时器的计时基准,正来源于晶振。
如果晶振的频率不稳,PWM信号就会随之漂移。后果便是:
动作抖动与卡顿:电机无法平滑运动,导致手指在抓取过程中颤抖。
力矩控制失准:要么无法握紧物体导致滑落,要么用力过猛捏碎目标(如鸡蛋或精密器件)。
噪音与发热:不稳定的驱动会使电机运行效率降低,产生额外噪音和热量。
因此,一颗高精度的晶振,是确保灵巧手动作行云流水、力道拿捏精准的物理基础。
多传感器同步的纽带:汇集信息的“感官中枢”
现代灵巧手是一个高度集成的传感器平台,指尖可能配备触觉传感器以感知压力与滑动,关节处布满编码器以反馈位置,手腕则有力矩传感器测量受力。这些海量的传感器数据需要被实时、同步地采集并传输给主处理器进行融合计算。
晶振在这里扮演了同步时钟源的角色:
统一时间戳:所有传感器在统一的时钟节拍下进行采样,使得处理器能够准确地知道在“某一刻”各个关节的位置、指尖的受力情况是如何的,从而构建出完整、协调的环境感知。
保障数据完整性:传感器与处理器之间通过SPI、I2C等总线通信,这些总线的速率由时钟决定。时钟不稳会导致数据传输出错,产生“虚假”的触觉或位置信号,误导控制系统。
可以说,没有晶振提供的精准时序,灵巧手所感知的世界将是扭曲和不同步的,其反应自然也难以精准。
稳定通信与高效计算的保障:连接“小脑”与“大脑”
高性能的灵巧手通常采用分布式控制架构。一个主控制器(大脑)负责高级决策,而每个手指甚至关节可能都有一个独立的从控制器(小脑)负责本地实时控制。这些控制器之间,以及灵巧手与机器人主体之间,需要通过CAN、EtherCAT等工业总线进行高速、可靠的通信。
这些通信协议对时序的要求极为苛刻,其比特率均由晶振衍生而来。时钟的微小偏差都会导致通信误码率上升,轻则指令延迟,重则整个手部与主体“失联”。同时,主控制器运行复杂的运动规划和人工智能算法,其每一步计算都依赖于时钟脉冲。晶振的频率稳定度,直接决定了系统在最繁忙时的计算响应能力与稳定性。
结语:于细微处见真章
回到最初的问题:灵巧手何以灵巧?答案不仅在于其仿生的骨骼、强大的电机或智能的算法,更在于那深藏于电子核心之中,默默提供着时间基准的晶振。它是将机械、传感与智能紧密联结在一起的隐形纽带,是确保“感知-决策-执行”这一闭环能够高速、精准运行的底层基石。
在机器人技术日益追求极致性能的今天,对晶振精度、稳定性和小型化的要求也水涨船高。每一只能够穿针引线、妙手生花的灵巧手背后,都跳动着一颗颗沉稳而精准的“石英之心”。正所谓:
于细微处见真章,晶振虽小,却是成就灵巧之手不可或缺的关键。
审核编辑 黄宇
-
机器人
+关注
关注
213文章
31389浏览量
223545 -
晶振
+关注
关注
35文章
3629浏览量
73795
发布评论请先 登录
灵巧手驱动技术深度报告:空心杯电机黄金赛道,高壁垒与高增长并存

灵巧手触觉感知技术深度报告:从“单点感知”到“触觉成像”

人形机器人“灵巧手”,正在接近27个自由度的人手

灵途科技深化跨界协同:共探灵巧手空间感知与纳米微针应用新路径

空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?

知行机器人发布全球首款左右手自适应灵巧手"束巧"
从概念到落地:灵巧手为何是人形机器人产业化的决胜环节?
灵巧手尺寸缩小60%的模块化驱动方案
一体化电机:灵巧手“动力心脏”的技术进阶
人形机器人市场火爆!雷赛智能重磅推出“20自由度”灵巧手方案
“芯片+算法+系统”三位一体,让灵巧手无惧空间挑战
年均增长64.6%,机器人灵巧手赛道高燃爆发




评论