 “芯片+算法+系统”三位一体,让灵巧手无惧空间挑战
“芯片+算法+系统”三位一体,让灵巧手无惧空间挑战

电子发烧友网报道(文/吴子鹏) 在机器人领域,灵巧手被众多业者定义为“皇冠上的明珠”。近年来,灵巧手在自由度、驱动方式及传感器集成方面取得显著进展。MPS模拟产品线总监瞿松表示,2024年之前,灵巧手方案基本为6个自由度,如今大部分方案已达到15个自由度以上,最高可至21个。如何在手掌大小的空间内装入15个乃至20+个电机,对整个行业而言都是巨大挑战。
在MPS人形机器人解决方案发布会上,该公司除介绍一系列可用于人形机器人的IC方案外,还展示了驱控一体式电机,尤其重点呈现了面向灵巧手应用的空心杯一体式电机方案。
作为人形机器人的核心部件,灵巧手的自由度、操作精度及价值占比正持续提升。根据MPS分享的数据,若人形机器人采用12个自由度的灵巧手,其方案将包含12个空心杯电机、12个行星减速器、12个6D力矩传感器及12个编码器,该套方案在人形机器人整体方案中的成本占比约为17.2%。随着自由度的提升,这一占比将进一步攀升,设计难度也随之陡增。
要实现类似人类手部关节的高度灵活性与多功能性,需设计复杂精巧的结构。例如,灵巧手每增加一个关节自由度,就需额外配备驱动单元、传动机构及支撑结构,而人类手掌与手指的空间极为狭小,在此背景下,空心杯电机已成为主流选择。同时,多个驱动单元同步动作时,需解决“力矩分配、动作同步性”问题——以抓握球形物体为例,指尖需同步贴合球面,若某一驱动出现响应延迟,易导致物体滑落或局部受力过大。
为破解灵巧手的设计难题,MPS在EZmotion端到端方案中,专门研发了8~16mm直径的空心杯电机一体化设计方案。其中,MMS1RH系列产品集成了伺服驱动器、位置编码器、永磁同步电机,SPI时钟频率8MHz,不仅能实现更简洁、安全的高精度控制,还可显著减少零部件数量及装配成本,提升整体方案的经济性与性价比。
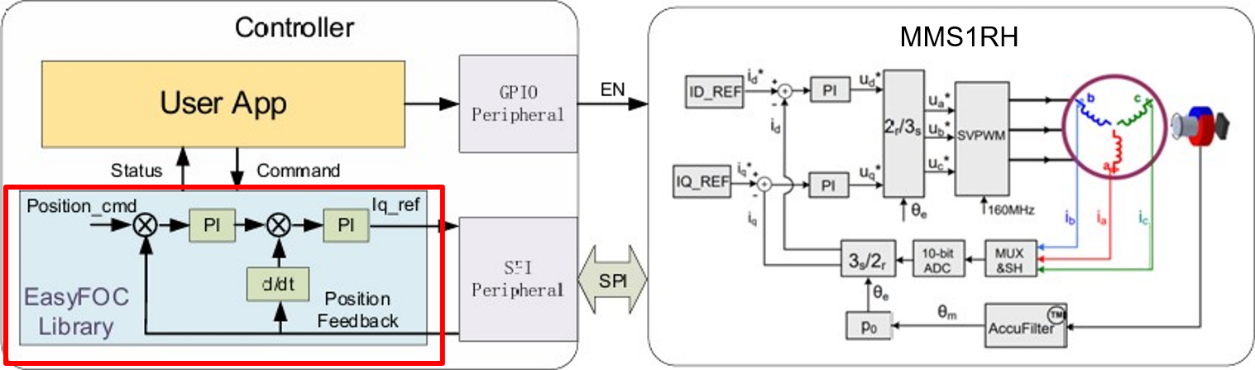
MMS1RH系列产品可独立实现转矩闭环控制,在配套的C语言EasyFOC库支持下,可运行于速度控制或位置控制模式。EasyFOC库通过SPI接口读取电机的角度、电流、电压反馈数据,根据客户设定的控制模式计算对应指令并发送至MMS1RH,从而实现位置或速度闭环控制;其中,对实时性要求较高的FOC电流环控制部分,直接在MMS1RH内部完成。
此外,为进一步完善灵巧手驱动解决方案,MPS还推出了电机驱动板MMP1RH。该器件具备FOC控制功能,集成角度传感器,尺寸超小(直径9mm、厚度6.5mm),输入电压范围为5V~18V,最大相电流2A,支持最高转速60000rpm,配备RS485接口,具备UVLO(欠压锁定)、OCP(过流保护)功能,可编程开关频率高达80kHz,角度传感器分辨率为14bit,电流采样ADC分辨率为10bit。
在电机驱动领域,MPS针对性推出了面向三相无刷直流电机的MP(Q)6547A和MP6543两款产品。其中,MP(Q)6547A具备宽电压范围优势,工作电压覆盖4V至32V;驱动能力方面,其内部集成3个半桥驱动器及6个低内阻MOSFET(高边MOSFET内阻60mΩ,低边MOSFET内阻50mΩ),连续输出电流可达3A,峰值电流达6A。封装采用QFN-18(3mm×4mm),配备可润湿侧翼,在提升散热性能的同时有效减小PCB占板面积。
MP6543的工作电压范围为3V至12V,内部同样集成3路半桥驱动器,每路MOSFET内阻110mΩ。控制便利性上,该产品支持PWM与ENBL输入、霍尔信号输入,内置3.3V/100mA LDO调节器,支持内部充电泵100%占空比工作,具备自动同步整流功能;为便于目标电流检测,还集成了双向电流检测放大器。封装采用QFN-24,大幅节省PCB空间。
传感器方案方面,瞿松重点介绍了基于磁阻效应的TMR传感器MA600A。相较于传统霍尔传感器,MA600A具备更高带宽、更高精度及更低非线性误差(INL),非常适配机器人应用场景。性能参数上,其工作电压为3V至3.6V,通信接口支持SPI、ABZ、PWM、UVW及SSI,适配多种通信协议;支持菊花链配置,灵活性更高,且通过AEC-Q100认证,安全可靠性优异。体积控制上,MA600A采用QFN-16封装,直径仅3mm,可轻松装配于灵巧手各关键位置;同时支持同轴或离轴安装,能适配不同机器人的机械结构差异。
这些性能领先的元器件,共同构成了MPS EZmotion端到端方案的核心基础。瞿松表示:“对于MPS而言,我们致力于确保在机器人所有关键部件领域,都能提供成熟的解决方案,凭借MPS独特的技术优势,助力方案商打造高功率密度、高效率、小体积的人形机器人方案。”
在MPS人形机器人解决方案发布会上,该公司除介绍一系列可用于人形机器人的IC方案外,还展示了驱控一体式电机,尤其重点呈现了面向灵巧手应用的空心杯一体式电机方案。
8~16mm直径高度集成空心杯一体式电机
相关统计数据显示,2024年全球灵巧手市场规模约为76万只/17亿美元,预计2030年将达到141万只/30亿美元,年复合增长率为14.5%。从产业链结构来看,机器人灵巧手行业上游为零部件供应环节,涵盖空心杯电机、减速器、传感器、控制器、光学编码器、丝杠、腱绳等;中游为机器人灵巧手生产制造环节,产品包括电机驱动式、气压驱动式、液压驱动式、形状记忆合金驱动式等多种类型的机器人多指灵巧手;下游应用场景聚焦于机器人领域,广泛服务于航空航天、医疗、智能制造、家政等行业。作为人形机器人的核心部件,灵巧手的自由度、操作精度及价值占比正持续提升。根据MPS分享的数据,若人形机器人采用12个自由度的灵巧手,其方案将包含12个空心杯电机、12个行星减速器、12个6D力矩传感器及12个编码器,该套方案在人形机器人整体方案中的成本占比约为17.2%。随着自由度的提升,这一占比将进一步攀升,设计难度也随之陡增。
要实现类似人类手部关节的高度灵活性与多功能性,需设计复杂精巧的结构。例如,灵巧手每增加一个关节自由度,就需额外配备驱动单元、传动机构及支撑结构,而人类手掌与手指的空间极为狭小,在此背景下,空心杯电机已成为主流选择。同时,多个驱动单元同步动作时,需解决“力矩分配、动作同步性”问题——以抓握球形物体为例,指尖需同步贴合球面,若某一驱动出现响应延迟,易导致物体滑落或局部受力过大。
为破解灵巧手的设计难题,MPS在EZmotion端到端方案中,专门研发了8~16mm直径的空心杯电机一体化设计方案。其中,MMS1RH系列产品集成了伺服驱动器、位置编码器、永磁同步电机,SPI时钟频率8MHz,不仅能实现更简洁、安全的高精度控制,还可显著减少零部件数量及装配成本,提升整体方案的经济性与性价比。
MMS1RH方案框图
MMS1RH系列产品可独立实现转矩闭环控制,在配套的C语言EasyFOC库支持下,可运行于速度控制或位置控制模式。EasyFOC库通过SPI接口读取电机的角度、电流、电压反馈数据,根据客户设定的控制模式计算对应指令并发送至MMS1RH,从而实现位置或速度闭环控制;其中,对实时性要求较高的FOC电流环控制部分,直接在MMS1RH内部完成。
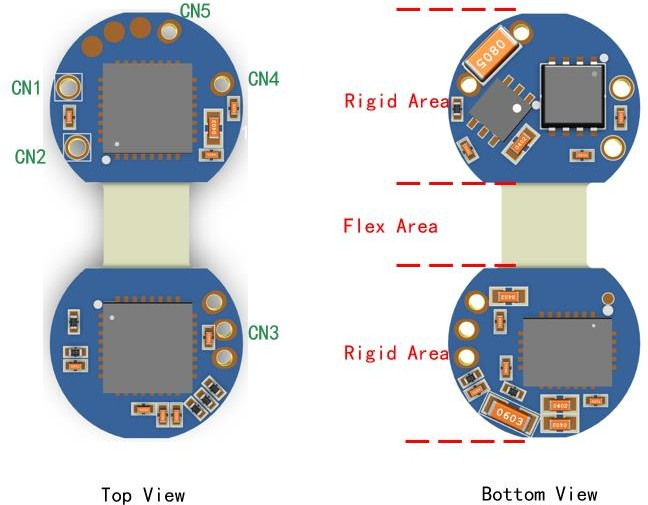
此外,为进一步完善灵巧手驱动解决方案,MPS还推出了电机驱动板MMP1RH。该器件具备FOC控制功能,集成角度传感器,尺寸超小(直径9mm、厚度6.5mm),输入电压范围为5V~18V,最大相电流2A,支持最高转速60000rpm,配备RS485接口,具备UVLO(欠压锁定)、OCP(过流保护)功能,可编程开关频率高达80kHz,角度传感器分辨率为14bit,电流采样ADC分辨率为10bit。
电机驱动板MMP1RH
MPS人形机器人整体解决方案
上述灵巧手方案是MPS人形机器人整体方案的重要组成部分。瞿松同时指出,当前灵巧手的应用已远超人形机器人范畴,拥有广阔市场空间。为赋能人形机器人及灵巧手研发设计,MPS推出了一系列核心元器件方案。在电机驱动领域,MPS针对性推出了面向三相无刷直流电机的MP(Q)6547A和MP6543两款产品。其中,MP(Q)6547A具备宽电压范围优势,工作电压覆盖4V至32V;驱动能力方面,其内部集成3个半桥驱动器及6个低内阻MOSFET(高边MOSFET内阻60mΩ,低边MOSFET内阻50mΩ),连续输出电流可达3A,峰值电流达6A。封装采用QFN-18(3mm×4mm),配备可润湿侧翼,在提升散热性能的同时有效减小PCB占板面积。
MP6543的工作电压范围为3V至12V,内部同样集成3路半桥驱动器,每路MOSFET内阻110mΩ。控制便利性上,该产品支持PWM与ENBL输入、霍尔信号输入,内置3.3V/100mA LDO调节器,支持内部充电泵100%占空比工作,具备自动同步整流功能;为便于目标电流检测,还集成了双向电流检测放大器。封装采用QFN-24,大幅节省PCB空间。
传感器方案方面,瞿松重点介绍了基于磁阻效应的TMR传感器MA600A。相较于传统霍尔传感器,MA600A具备更高带宽、更高精度及更低非线性误差(INL),非常适配机器人应用场景。性能参数上,其工作电压为3V至3.6V,通信接口支持SPI、ABZ、PWM、UVW及SSI,适配多种通信协议;支持菊花链配置,灵活性更高,且通过AEC-Q100认证,安全可靠性优异。体积控制上,MA600A采用QFN-16封装,直径仅3mm,可轻松装配于灵巧手各关键位置;同时支持同轴或离轴安装,能适配不同机器人的机械结构差异。
这些性能领先的元器件,共同构成了MPS EZmotion端到端方案的核心基础。瞿松表示:“对于MPS而言,我们致力于确保在机器人所有关键部件领域,都能提供成熟的解决方案,凭借MPS独特的技术优势,助力方案商打造高功率密度、高效率、小体积的人形机器人方案。”
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
灵巧手
+关注
关注
0文章
58浏览量
354
发布评论请先 登录
相关推荐
热点推荐
灵巧手驱动技术深度报告:空心杯电机黄金赛道,高壁垒与高增长并存
电子发烧友网综合报道,人形机器人的核心执行部件灵巧手的性能直接决定了机器人完成精细操作任务的能力。其中,驱动系统作为灵巧手的“肌肉”和动力源,其技术路线的选择直接影响了整手的性能、成本及可靠性

灵巧手触觉感知技术深度报告:从“单点感知”到“触觉成像”
电子发烧友网报道(文/莫婷婷)随着人形机器人产业从“运动控制”向“精细操作”跨越,灵巧手已成为决定机器人能否真正融入人类生活与生产场景的关键部件。而赋予灵巧手“灵魂”的核心,在于其感知系统——尤其是

GGII:2025年中国灵巧手企业出货量排行榜
零部件和控制算法,是人形机器人实现精细操作的重要载体之一。 灵巧手具备高技术壁垒和高价值量,被认为是人形机器人竞争的胜负手。 高技术壁垒在于灵巧手需平衡“价格、性能、可靠性”的不可能

灵途科技深化跨界协同:共探灵巧手空间感知与纳米微针应用新路径
,展开了一场关于精密感知与微纳技术融合的深度考察与合作探讨。 灵途科技深化跨界协同 共探灵巧手空间感知与纳米微针应用新路径 Part.1 聚焦灵巧手:从“看得见”到“抓得准”

空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?
电机类型中,空心杯电机脱颖而出,成为当下人形机器人灵巧手的主流之选。这背后蕴含着怎样的奥秘呢?空心杯电机契合灵巧手需求的卓越特性1.轻巧灵动,适配狭小空间人形机器人

从概念到落地:灵巧手为何是人形机器人产业化的决胜环节?
人形机器人被誉为下一代通用型机器人平台,其终极目标是能够无缝接入人类环境,使用人类工具,执行多样化任务。然而,能否“灵巧”地操作物体,成为区分概念Demo与实用产品的关键。灵巧手的性能,直接决定了
灵巧手尺寸缩小60%的模块化驱动方案
传统的灵巧手执行方案,就像用一台中央电脑去控制十几个机械臂。所有电机的驱动芯片都集中在手掌的主板上——线路复杂、体积臃肿。想增加一个手指的自由度,意味着重新设计整个手掌,拓展性极差。
广凌智慧教室整体解决方案优势是什么?
广凌方案以“硬件+软件+数据”三位一体的设计理念,构建“教、学、管、评”一体化的智慧教育体系,实现教学效率与管理效能的双重提升。

一体化电机:灵巧手“动力心脏”的技术进阶
)约为11%,这一增长主要得益于人形机器人产业的带动。 在工业自动化、服务机器人、医疗康复等领域,灵巧手作为模拟人类手部动作的核心执行部件,其作业精度、响应速度与动作灵活性直接决定了设备的整体性能。而电机作为灵巧手的“肌肉”
AI、量子通信与JCAP:6G时代的“三位一体“革命
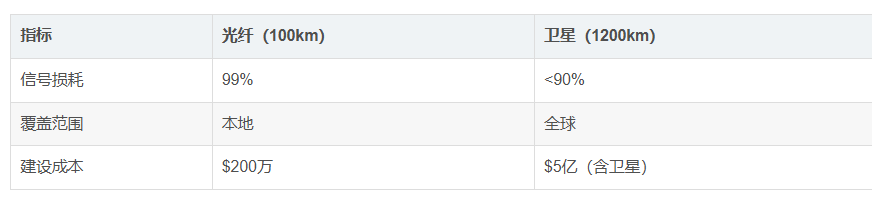
100%的覆盖可靠性 然而,这些数字背后隐藏着更深层的挑战: 太空与地面的无缝连接 绝对安全的信息传输 厘米级的实时定位 要实现这些突破,仅靠单点技术创新已无法满足需求。AI、量子通信和联合通信与定位(JCAP)三大技术的深度融合,正在构建6G的"
年均增长64.6%,机器人灵巧手赛道高燃爆发
64.6%。这一预测充分反映出灵巧手作为人形机器人核心部件的高增长潜力。 近年来,机器人多指灵巧手在结构设计、驱动方式、感知能力等领域取得显著技术进步。例如,部分企业通过自研减速器等手段,实现单位体积内扭矩密度的最大化,不

基于CW32L010单片机的扫振一体电动牙刷应用方案
电动牙刷作为现代口腔护理的重要工具,其核心控制系统对产品性能、用户体验和成本控制至关重要。而传统的声波式电动牙刷虽然刷头也会振动,但需要用户手动调整角度才能更好地清洁牙缝和牙龈沟,扫振一体设计则通过
发表于 06-17 09:38



评论