 DRV83x2三相PWM电机驱动器:特性、应用与设计要点解析
DRV83x2三相PWM电机驱动器:特性、应用与设计要点解析

DRV83x2三相PWM电机驱动器:特性、应用与设计要点解析
引言
在电机驱动领域,高效、可靠且具备先进保护功能的驱动器至关重要。TI的DRV83x2系列三相PWM电机驱动器就是这样一款出色的产品,它为各种电机驱动应用提供了强大的支持。本文将深入剖析DRV83x2的特性、应用场景以及设计过程中的关键要点,帮助电子工程师更好地理解和应用这款驱动器。
文件下载:drv8312.pdf
一、产品特性亮点
(一)高效功率级
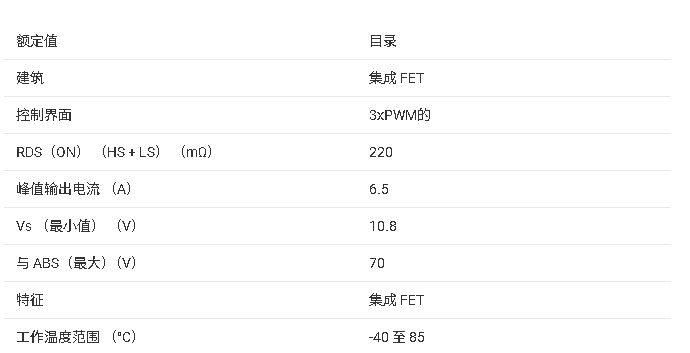
DRV83x2采用低导通电阻((R{DS(on)}))的MOSFET,在(T{J}=25^{circ} C)时,(R_{DS(on)} )低至80 mΩ,功率级效率高达97%。这种高效设计不仅能降低功耗,还减少了发热,使得系统可以采用更小的电源和散热片。
(二)宽工作电压与电流范围
其工作电源电压最高可达50V(绝对最大值70A),不同型号的连续相电流能力有所差异。例如,DRV8312(功率焊盘朝下)的连续相电流可达3.5A(峰值6.5A),而DRV8332(功率焊盘朝上)的连续相电流可达8A(峰值13A),能满足不同功率需求的电机驱动。
(三)独立控制与高频率PWM
该驱动器可对三相进行独立控制,PWM工作频率最高可达500kHz,为电机的精确控制提供了保障。
(四)全面保护功能
集成了欠压、过温、过载和短路等自保护电路,还有可编程的逐周期电流限制保护。在面对各种故障情况时,能迅速做出响应,保护驱动器和电机不受损坏。
(五)智能栅极驱动与免外部元件设计
采用智能栅极驱动技术,可防止交叉导通,且无需外部缓冲器或肖特基二极管,简化了电路设计。
二、应用领域广泛
(一)主流电机驱动
DRV83x2常用于无刷直流(BLDC)电机和三相永磁同步电机(PMSM)的驱动,为这些电机提供高效、稳定的控制,广泛应用于工业自动化、机器人等领域。
(二)其他应用场景
还可用于逆变器、半桥驱动器以及机器人控制系统等,展现了其强大的适应性和通用性。
三、详细功能描述
(一)引脚配置与功能
DRV8312采用44引脚的HTSSOP(DDW)封装,底部有散热垫;DRV8332采用36引脚的HSSOP(DKD)封装,顶部有厚散热片。每个引脚都有特定的功能,如AGND为模拟地,BST_X为高端自举电源引脚,PWM_X和RESET_X分别用于控制和复位半桥输出等。通过合理使用这些引脚,可以实现对电机的精确控制。
(二)保护系统
1. 错误报告
FAULT和OTW引脚为低电平有效、开漏输出,用于向PWM控制器或其他系统控制设备发送保护模式信号。当出现故障导致设备关机时,FAULT引脚变低;当器件结温超过125°C时,OTW引脚变低。
2. 过流保护(OC)
具有独立、快速响应的电流检测器,可通过模式选择引脚设置为逐周期(CBC)电流限制模式和过流锁定(OCL)关机模式。在CBC模式下,可有效限制电机启动或瞬态时的浪涌电流;在OCL模式下,过流情况将导致设备关机,需复位引脚恢复正常。OC阈值可通过连接在OC_ADJ引脚和AGND引脚之间的单个外部电阻进行编程。
3. 过温保护
具备两级温度保护系统。当器件结温超过125°C(标称)时,发出OTW警告信号;超过150°C(标称)时,设备进入热关机状态,所有半桥输出设置为高阻抗状态,FAULT引脚变低。
4. 欠压保护(UVP)和上电复位(POR)
UVP和POR电路可在电源上电、掉电和欠压情况下全面保护设备。当GVDD_X和VDD电源电压达到9.8V(典型值)时,POR电路复位过流电路,确保所有电路正常工作。任何VDD或GVDD_X引脚的电源电压降至UVP阈值以下,所有半桥输出将立即设置为高阻抗状态,FAULT引脚变低。
5. 设备复位
提供三个复位引脚,用于独立控制半桥A、B和C。当RESET_X引脚置低时,半桥X中的两个功率级FET被强制进入高阻抗状态;复位输入的上升沿可使设备在关机故障后恢复运行。
(三)设备功能模式
支持两种不同的运行模式:带CBC电流限制的三相或三个半桥模式,以及带OC锁定关机(无CBC电流限制)的三相或三个半桥模式。由于每个半桥都有独立的电源和接地引脚,可在PVDD到PVDD_X或GND_X到GND之间插入分流检测电阻,推荐在PVDD和PVDD_X之间使用高端分流电阻进行差分电流检测。
四、应用与设计要点
(一)三相运行应用设计
1. 设计要求
在设计三相运行应用时,需要考虑电机电压、电机电流(峰值和RMS)、过流阈值、过流行为等设计参数。例如,电机电压的选择会影响电机的转速和电流控制精度,较高的电压可实现更高的RPM,较低的电压则有利于更精确的相电流控制。
2. 详细设计流程
- 电源设计:DRV83x2需要12V电源为GVDD和VDD引脚供电,建议设计的12V电源电流能力至少为负载电流的5 - 10%,且不低于100mA,以确保在不同温度和负载条件下的设备性能。
- 去耦电容选择:去耦电容的电压应根据良好的设计实践进行选择,需考虑温度、纹波电流和电压过冲等因素。对于50V的应用,建议使用电压额定值至少为63V的陶瓷电容(X5R或更高等级)。
- 过流阈值设置:选择OC_ADJ引脚的电阻值时,要考虑正常系统行为下允许的峰值电流、电阻公差以及表中电流的±10%公差。
- 检测电阻选择:检测电阻应采用表面贴装、低电感、功率足够的电阻,并靠近电机驱动器放置。为了均匀分配电流和散热,可使用多个标准电阻并联。
- 输出电感选择:正常运行时,电机的电感通常足以提供低di/dt输出和过载保护,无需额外的输出电感。但在短路情况下,建议使用铁氧体磁珠或电感,以限制短路电流的上升速度。铁氧体磁珠的电流额定值应高于系统正常运行时的RMS电流,且在10MHz或更低频率下的最小阻抗建议为10Ω或更高。
(二)电源供应建议
1. 大容量电容
合适的本地大容量电容对于电机驱动系统设计至关重要。所需的本地电容数量取决于多种因素,包括电机系统所需的最高电流、电源的电容和供电能力、电源与电机系统之间的寄生电感、可接受的电压纹波、电机类型和制动方法等。
2. 电源上电和掉电顺序
DRV83x2不严格要求电源上电和掉电顺序,但在上电时建议将RESET_A、RESET_B和RESET_C置低,以允许内部电路通过使半桥输出的弱下拉来为外部自举电容充电;掉电时将这些引脚置低可防止过渡期间出现未知状态。
3. 系统设计建议
各引脚在系统设计中都有特定要求,如VREG引脚用于内部逻辑,不应作为外部电路的电压源;OTW和FAULT引脚在3.3V逻辑中无需外部上拉电阻或3.3V电源,在5V逻辑中则需要外部上拉电阻到5V等。
(三)布局设计
1. PCB材料与接地平面
推荐使用FR - 4玻璃环氧树脂材料,上下层采用2oz铜,以提高热性能和降低噪声敏感性。建议使用大面积的、无间断的单一接地平面,将接地引脚的走线尽可能短而宽,并通过多个过孔连接到底层接地平面。
2. 去耦电容与AGND
高频去耦电容(100nF)应靠近PVDD_X引脚放置,并具有短的接地返回路径。AGND是逻辑信号的局部内部接地,建议在GND和AGND之间连接一个1Ω电阻,以隔离板接地的噪声。
3. 热考虑
DRV8332的热增强封装可通过热界面化合物直接连接到散热器,散热器应连接到PCB上的系统接地,以减少接地噪声。系统的热阻(R{theta J A})由(R{theta J C})、热油脂热阻和散热器热阻组成。
五、总结
DRV83x2系列三相PWM电机驱动器凭借其高效、可靠、多功能的特点,成为电机驱动应用的理想选择。电子工程师在设计过程中,需要充分考虑其特性、应用要求和设计要点,以实现最佳的系统性能。同时,在实际应用中,还需根据具体情况进行测试和优化,确保系统的稳定性和可靠性。你在使用DRV83x2的过程中遇到过哪些问题呢?欢迎在评论区分享交流。
发布评论请先 登录
DRV83x2是具有先进的保护系统的高性能集成三相电机驱动器
德州仪器DRV8316三相智能门驱动器的技术解析与应用
DRV83x2三相PWM电机驱动器技术文档总结



评论