 深度解析 DRV8711:高性能步进电机控制器的全方位指南
深度解析 DRV8711:高性能步进电机控制器的全方位指南

深度解析 DRV8711:高性能步进电机控制器的全方位指南
在电子工程领域,步进电机的精确控制一直是一个重要的研究方向,尤其是在对精度和稳定性要求极高的应用场景中。德州仪器(TI)推出的 DRV8711 步进电机控制器 IC,凭借其卓越的性能和丰富的功能,成为了众多工程师的首选。本文将深入剖析 DRV8711 的各项特性、工作原理、应用场景以及设计注意事项,旨在为工程师们提供一个全面且实用的参考。
文件下载:drv8711.pdf
一、DRV8711 概述
DRV8711 是一款功能强大的步进电机控制器,它采用脉冲宽度调制(PWM)微步进技术,通过外部 N 沟道 MOSFET 来驱动双极步进电机或两个有刷直流电机。其集成的微步进索引器支持从整步到 1/256 步的多种步进模式,能够实现超平滑的运动控制。同时,该器件具备丰富的保护和诊断功能,可有效保障电机系统的稳定运行。
主要特性
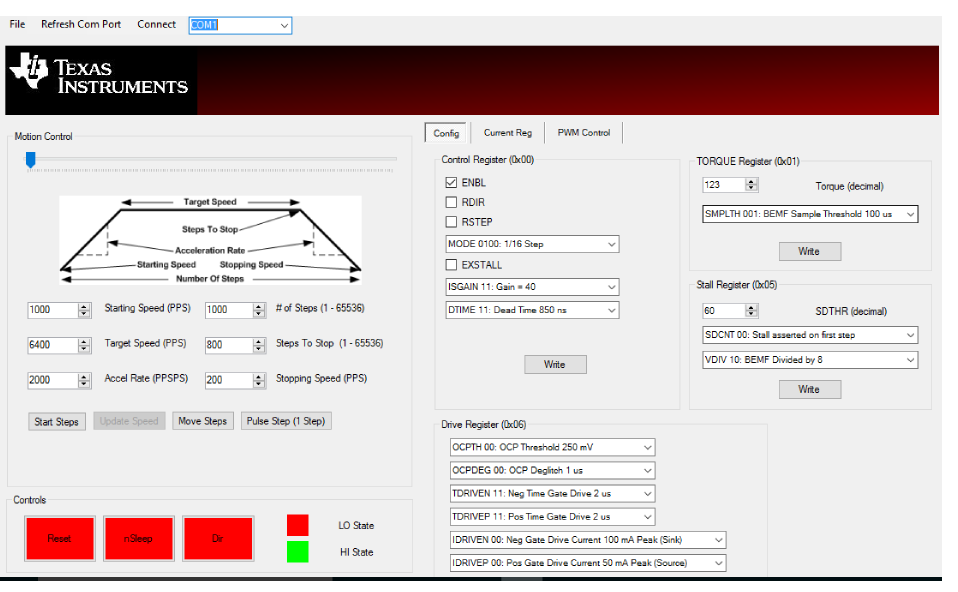
- 高度可配置的 SPI 串行接口:通过 SPI 接口,用户可以方便地对输出电流(扭矩)、步进模式、衰减模式和失速检测等功能进行编程,实现灵活的控制策略。
- 内置 1/256 步微步进索引器:提供多种步进模式选择,可根据不同应用需求调整电机的运动精度和平滑度。
- 灵活的衰减模式:支持快速衰减、慢速衰减、固定混合衰减和自动混合衰减等多种模式,有效减少电流纹波,提高电机性能。
- 失速检测功能:通过监测电机的反电动势(BEMF),能够及时检测电机是否失速,并提供相应的输出信号,便于系统采取保护措施。
- 宽工作电压范围:8V 至 52V 的工作电源电压范围,可适应不同的应用场景和电源要求。
- 完善的保护功能:具备过流保护(OCP)、过温关断(OTS)、欠压锁定(UVLO)等多种保护机制,确保器件在异常情况下的安全性和可靠性。
二、应用领域
DRV8711 广泛应用于各种需要精确电机控制的领域,如办公自动化设备(打印机、复印机等)、工厂自动化、纺织机械和机器人等。在这些应用中,DRV8711 的高性能和高精度能够满足设备对电机运动控制的严格要求,提高设备的工作效率和稳定性。
三、技术细节剖析
(一)引脚配置与功能
DRV8711 采用 38 引脚的 HTSSOP 封装,每个引脚都有特定的功能。例如,VM 引脚用于连接电机电源,V5 引脚为 5V 调节器输出,STEP/AIN1 和 DIR/AIN2 引脚分别用于步进输入和方向输入等。详细的引脚功能可参考数据手册,正确的引脚连接是确保器件正常工作的基础。
(二)工作模式
DRV8711 支持直接 PWM 输入模式和微步进索引器模式。
- 直接 PWM 输入模式:通过设置 OFF 寄存器中的 PWMMODE 位来选择该模式。在这种模式下,AIN1、AIN2、BIN1 和 BIN2 引脚直接控制输出驱动器的状态,可用于驱动两个有刷直流电机。
- 微步进索引器模式:通过 CTRL 寄存器中的 MODE 位来配置步进格式,支持从整步到 1/256 步的多种步进模式。在该模式下,电机的运动更加平滑,噪声更小。
(三)电流调节
DRV8711 通过可调固定关断时间的 PWM 电流调节电路来控制电机绕组中的电流。当电流达到设定的阈值时,H 桥会在一段可编程的时间内关断电流,然后重新开启,开始下一个 PWM 周期。这种方式可以确保电机绕组中的电流稳定,提高电机的性能和效率。
(四)衰减模式
在 PWM 电流斩波过程中,H 桥达到斩波电流阈值后,可工作在快速衰减或慢速衰减状态。此外,DRV8711 还支持固定混合衰减和自动混合衰减模式,这些模式可以根据电机的工作状态自动调整电流衰减方式,有效减少电流纹波。
- 快速衰减模式:当 PWM 斩波电流达到设定值时,H 桥反转状态,使绕组电流反向流动,以快速降低电流。
- 慢速衰减模式:通过启用 H 桥中的两个低侧 FET,使绕组电流在桥内循环,实现缓慢的电流衰减。
- 混合衰减模式:开始为快速衰减,经过一段可编程的时间后切换到慢速衰减模式。
- 自动混合衰减模式:在消隐时间结束时采样电流水平,根据电流与阈值的比较结果自动切换衰减模式。
(五)失速检测
DRV8711 采用反电动势监测方案来检测电机是否失速。它支持内部失速检测和外部微控制器监测两种方式:
- 内部失速检测:将 CTRL 寄存器中的 EXSTALL 位设置为 0,当采样到的反电动势低于 STALL 寄存器中设置的阈值时,STALLn/BEMFVn 输出引脚会发出有效失速信号。
- 外部失速检测:将 EXSTALL 位设置为 1,STALLn / BEMFVn 输出引脚用于指示有效的反电动势测量已准备好,外部微控制器可以通过采样 BEMF 引脚的电压来判断电机是否失速。
(六)保护电路
为了确保器件的安全性和可靠性,DRV8711 具备完善的保护电路,包括过流保护、预驱动器故障保护、过温关断和欠压锁定等。
- 过流保护(OCP):通过监测外部 FET 上的电压降来检测过流情况。当电压超过设定值且持续时间超过规定时间时,会触发 OCP 事件,相应的 H 桥将被禁用,并通过 STATUS 寄存器和 FAULTn 引脚发出故障信号。
- 预驱动器故障保护:在 PWM 模式下,如果检测到栅极驱动输出上的电流过大,说明可能存在输出 FET 故障或 PCB 故障,此时会禁用相应的 H 桥,并发出故障信号。
- 过温关断(TSD):当芯片温度超过安全限制时,所有 FET 会被禁用,OTS 位会在 STATUS 寄存器中设置,FAULTn 引脚会拉低。当温度降至安全水平时,器件会自动恢复正常工作。
- 欠压锁定(UVLO):当 VM 引脚电压低于欠压锁定阈值时,所有 FET 会被禁用,UVLO 位会在 STATUS 寄存器中设置,FAULTn 引脚会拉低。当 VM 电压高于阈值时,器件会恢复正常工作。
四、设计与应用注意事项
(一)感测电阻
感测电阻对于 DRV8711 的性能至关重要。为了实现最佳性能,感测电阻应选择表面贴装、低电感、功率额定值足够高的类型,并尽可能靠近电机驱动器放置。同时,需要根据电机的电流大小和工作条件合理选择感测电阻的阻值,以确保准确的电流检测。
(二)可选串联栅极电阻
在高电流或高电压应用中,为了防止系统噪声导致低侧预驱动器故障,建议在低侧输出和低侧 FET 的栅极之间串联一个 47 至 120Ω 的电阻。同时,将死区时间设置为 850ns 可以进一步提高系统的稳定性。
(三)电源供应
在设计电机驱动系统时,适当的本地大容量电容是非常重要的。大容量电容可以提供稳定的电源,减少电压波动和纹波,确保电机能够正常工作。具体的电容值需要根据电机系统的最高电流、电源的电容和供电能力、寄生电感、允许的电压纹波等因素进行综合考虑。
(四)布局设计
合理的 PCB 布局对于 DRV8711 的性能和稳定性也有着重要影响。在布局时,应注意以下几点:
- VM 引脚应使用低 ESR 陶瓷旁路电容旁路到 GND,并尽可能靠近引脚放置。
- 在 VM 和 VCP 引脚之间、CP1 和 CP2 引脚之间、VINT 和 V5 引脚与 GND 之间分别放置合适的低 ESR 陶瓷电容,并靠近相应引脚。
- 尽量减少信号走线的长度和干扰,避免信号交叉和耦合。
五、总结
DRV8711 作为一款高性能的步进电机控制器,具有丰富的功能和出色的性能。它的高度可配置性、灵活的衰减模式、失速检测功能以及完善的保护机制,使其在各种步进电机控制应用中具有显著的优势。然而,在实际应用中,工程师们需要根据具体的应用需求和系统要求,合理选择器件参数、优化电路设计和布局,以充分发挥 DRV8711 的性能,实现高效、稳定的电机控制。你在使用 DRV8711 过程中遇到过哪些问题呢?欢迎在评论区分享你的经验和见解。
-
电机控制
+关注
关注
3601文章
2175浏览量
279096 -
drv8711
+关注
关注
2文章
5浏览量
10213 -
步进电机控制器
+关注
关注
1文章
28浏览量
6776
发布评论请先 登录
drv8711带不了电机转动的原因?怎么解决?
STM32单片机控制TI 芯片DRV8711,控制步进电机
基于 DRV8711 具有 256 微步进功能的双极步进电机系统参考设计包含BOM,PCB文件及光绘文件
基于DRV8711步进电机预驱动器的自动扭矩实施方案
DRV8711 具有片上 1/256 微步进分度器和失速检测的步进电机前置驱动器






评论