 山东大学:研究用于高精度压力和温度认知的仿生电子掌
山东大学:研究用于高精度压力和温度认知的仿生电子掌

一、摘要
当前的压力和温度传感方法面临着串扰、低集成度以及难以实现大规模阵列等问题。这些问题显著影响了多功能仿生传感器在智能仿生机器人中的实际应用价值。在本研究中,作者提出了一种新型多功能仿生电子手掌系统(BEPS),该系统由16个双模解耦仿生电子皮肤(e-skin)组成。通过巧妙地引入垂直堆叠设计以及原位光聚合和3D打印技术的制造,构建了具有高传感性能的大规模阵列集成。此外,开发了一种通用解耦计算模型,实现了温度和压力的无串扰传感。为展示所提出的仿生手掌的实际应用价值,本文实施的三个示范应用表明,该机械手能够检测水温和水位,并确认被抓取物体的柔软度和形状。BEPS系统结合神经手收缩反射,实现了在处理热物体和冷物体时的闭环控制和反馈。这一进展在增强机器人系统的功能性和适应性方面具有巨大的潜力。
二、背景介绍
人类的手是感知外部世界的重要器官,每个关节参与各种精确的操作。手能够感知温度、压力、湿度、纹理、振动和疼痛等刺激,尤其是压力和温度。目前,许多研究致力于开发能够模拟压力和温度的设备。例如,Ren等人设计了一种基于组合仿生策略的柔性多层连续压力定位传感器,实现了压力模拟。同时,Zhang等人利用热诱导离子迁移动力学和电诱导阳离子植入机制,在由非离子聚合物和聚电解质层组成的不对称双层中实现了温度传感。人手对压力的感知是通过位于皮肤中的压力感受器,如梅克尔细胞和帕契尼小体实现的;而温度的感知则是通过神经末梢中的热感受器(如热和冷感受器)来实现的。实际上,这些位于皮肤有限空间内的感受器能够独立接收和处理信息,且由于神经感受器的选择性敏感性,不会相互干扰。此外,神经系统中每种类型的感受器信号都有专门的通路,分别由不同的神经纤维传递温度和压力信号。这种“分工”机制确保了不同类型的感觉信号能够独立运作,并在不发生交叉干扰的情况下到达大脑,使人类能够准确感知环境信息及其变化。不幸的是,目前的研究仍然在很大程度上依赖单一设备来实现温度和压力的同时感知。例如,Chen等人探索了一种高性能压力传感器,该传感器能够通过功能化碳纳米管与柔性改性硅橡胶的结合, simultaneously 对温度和压力刺激作出响应。然而,所提出的传感器在温度和压力信号之间表现出显著的交叉敏感性。如何克服这种交叉敏感性,解耦干扰,实现对两种信号的独立感测,是当前研究中必须勇敢面对的挑战。因此,为了实现更先进、精确和深入的仿生学,有必要对“分工”进行高度精确的模仿。
在本研究中,作者开发了一种生物仿生电子手掌系统(BEPS),用于温度和压力的双模解耦感测,该系统由16个双模解耦生物仿生(BDB)电子皮肤阵列组成。BDB电子皮肤通过双层柔性印刷电路板(FPCB)结构设计,实现了温度和压力感测单元的高度集成垂直分层堆叠(见图1b(iii))。压力感测单元采用均匀分层的微锥结构,利用3D打印技术实现超电容离子压力感测;温度感测单元使用具有海胆状结构的PANI@PS微纳米颗粒作为温度敏感材料,同时采用原位光聚合技术,使温度感测层的热阻电极与温度感测层紧密接触,以确保在温度感测过程中接触电阻不受压力变化的影响。此外,基于设备的整体特性,建立了一个通用的解耦模型,用于温度和压力双模信号的无干扰解耦算法。BDB电子皮肤在30 kPa以下的压力范围内表现出线性灵敏度(30.99 kPa−1),在室温至80 °C的温度范围内表现出超高灵敏度(0.29 K−1)。如图1c所示,与单一设备结构和平面集成设备架构相比,本研究所采用的垂直堆叠分层结构在灵敏度、信号获取的便捷性、解耦和抗干扰能力等方面表现出更为平衡的性能。此外,与平面设备相比,其集成度优异。此外,本研究通过使用决策树算法实时识别杯中水的温度和水位,展示了该系统无干扰的温度感知能力。基于无干扰的压力感知能力,卷积神经网络(CNNs)用于识别该系统中机器人手抓取物体的硬度和形状。同时,基于温度和压力的同步无干扰认知能力,实现了生物启发手的收缩响应反馈控制。
三、内容详解
欲了解详细制备过程,请阅读原文。
3.1 结构设计与表征

图1. 新型仿生电子手掌系统的示意图,集成了压力-温度BDB电子皮肤。a) 机器人独立感知温度和压力信息的示意图,以及人类皮肤及其感受器的示意图。b) 压力-温度BDB电子皮肤综合性能的比较:热电压敏电阻集成电子皮肤(i)、温度和压力传感单元平面分布电子皮肤(ii)、本研究涉及的电子皮肤(iii)。c) 综合性能比较图。d) BDB电子皮肤的集成阵列示意图(i)、BDB电子皮肤的器件结构示意图(ii)、温度传感层示意图(iii)、PVDF-HFP层均匀分层微锥结构的激光共聚焦图像(iv)、PUA&HEA和PUA&HEA&PANI@PS的FTIR图(v)、PANI@PS海胆状颗粒的SEM图像(vi)及PVDF-HFP分层微锥结构的SEM图像(vii)、PVDF-HFP分层微锥结构的局部放大SEM图像(viii)。
3.2 传感性能特征化

图2. BDB电子皮肤的温度和压力传感性能表征。a) BDB电子皮肤压力传感单元电信号测量方法的示意图。b) 不同浓度离子液体的压力灵敏度测试(在室温下)。c) 在1 kPa压力下的响应/恢复时间。d) 压力传感的最小检测限。e) 温度电流传感测试的示意图。f) 含有不同质量分数PANI@PS的温度传感单元随温度变化的相对电流变化。g) 温度从室温变化到30°C时的传感响应和恢复时间。h) 温度传感在20至30°C范围内的重复性测试。i–l) 在不同温度(20、30、40和50°C)下,压力传感单元在变化压力下的电容变化。m) 拟合系数随温度的变化。n) 在不同温度下,经过解耦计算后的压力传感单元在变化压力下的输出信号变化。o) 在20°C下,温度传感单元在不同压力变化下的电流变化。p) 在不同温度变化(5、10、15、20、25、30、35和40 kPa)下,温度传感单元的电流变化。
3.3 传感机制的表征

图3. BDB电子皮肤的传感机制。a) 温度传感单元的等效电路图。b) 压力传感单元中超电容离子电子的示意图。c–e) COMSOL有限元分析模拟结果显示设备在不同压力下的应力分布、设备在不同温度下的电场强度分布,以及设备在不同温度下的离子浓度分布。f) 电子皮肤温度和压力传感的解耦计算。用手指按压玻璃载玻片以隔离温度,仅施加压力刺激(i 和 ii),使用热风枪加热以仅施加温度刺激(iii 和 iv),以及手指触碰设备,同时刺激温度和压力(v 和 vi)。
3.4 仿生电子掌智能认知系统

图4. 智能认知系统的演示。a) 具备智能认知能力的机械手概念图。b) 基于决策树和神经网络的杯中水位和温度识别以及物体硬度识别,包括数据生成与获取、训练过程和实际认知过程。c) 智能感知系统,BDB电子皮肤捕捉机械手抓取不同温度和水位的杯子时的当前数据和热图像。d) 杯中水位和温度识别界面,显示识别结果以及不同温度和水位对应的曲线。e) BDB电子皮肤在机械手抓取不同硬度球体过程中输出的压力信号变化。f) CNN网络结构示意图。g) 硬度识别的混淆矩阵。h) 硬度识别界面,显示识别结果以及不同硬度水平对应的曲线。
3.5 先进的智能闭环反馈系统
 图5. 先进智能闭环反馈系统的演示。a) 仿生人手撤回反射系统的示意图。b) 仿生人手撤回反射系统的流程图。c) 在机器人手抓握过程中系统压力和温度传感器数据的曲线。d) 仿生人手撤回反射与闭环控制机器人手抓握系统的界面,展示在不同温度下的自我保护,以及对不同硬度杯子的抓握闭环控制:抓握装有冷水的玻璃杯的演示 (i),抓握装有冷水的纸杯的演示 (ii),抓握装有热水的玻璃杯的演示 (iii),正常抓握演示 (iv–vi),抓握演示中的过热自我保护 (vii–ix)。e) 在抓握过程中机器人手的角度随时间的变化:用机器人手抓握冷玻璃水杯的过程 (i),机器人手抓握高温自我保护的过程 (ii)。
图5. 先进智能闭环反馈系统的演示。a) 仿生人手撤回反射系统的示意图。b) 仿生人手撤回反射系统的流程图。c) 在机器人手抓握过程中系统压力和温度传感器数据的曲线。d) 仿生人手撤回反射与闭环控制机器人手抓握系统的界面,展示在不同温度下的自我保护,以及对不同硬度杯子的抓握闭环控制:抓握装有冷水的玻璃杯的演示 (i),抓握装有冷水的纸杯的演示 (ii),抓握装有热水的玻璃杯的演示 (iii),正常抓握演示 (iv–vi),抓握演示中的过热自我保护 (vii–ix)。e) 在抓握过程中机器人手的角度随时间的变化:用机器人手抓握冷玻璃水杯的过程 (i),机器人手抓握高温自我保护的过程 (ii)。
四、全文总结
当前的压力和温度传感方法面临着串扰、低集成度以及难以实现大规模阵列等问题。这些问题显著影响了多功能仿生传感器在智能仿生机器人中的实际应用价值。本研究遵循“分工”原则,成功开发了一种具备双模式解耦温度和压力传感能力的BEPS。该BEPS集成了16个BDB电子皮肤,有效解耦温度和压力信号。这些BDB电子皮肤展现出高线性灵敏度、快速响应和恢复时间、低检测限以及卓越的稳定性。为了解决温度对压力传感单元的干扰,提出了一种通用解耦算法,实现了无串扰的温度和压力传感。此外,通过将BEPS与机器人手臂集成,该系统能够检测周围环境的温度和压力,计算被抓取物体的温度,并确定容器内的液位。在CNN算法的辅助下,机器人手臂还能够更深入地理解被抓取物体的形状和硬度,从而拓宽其应用范围。本研究的突出贡献在于开发了一种先进的智能闭环反馈系统,该系统能够模拟人手的灵活性和自我保护功能。此外,该系统增强了机器人手臂操作的灵活性和安全性,为自动化应用开辟了新可能,并提升了机器人技术的智能性和安全性。通过创新设计和智能
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55842浏览量
795543
发布评论请先 登录
探索MAX40109:压力传感器的高精度信号调理AFE
TMP20:高精度模拟输出温度传感器的全方位解析
LMT87:高精度模拟温度传感器的卓越之选
高精度温度测量利器:LMT01数字输出温度传感器解析
山东大学开源鸿蒙技术俱乐部成立仪式暨系统软件技术论坛圆满举办
山东大学与济南市科技局领导莅临深兰科技调研考察
2025开放原子校源行山东大学站圆满落幕
高精度压力测量器:国产万分级精度零点稳定性和满量程稳定性能应用场景分析
【AI大讲堂】中星联华走进高校系列-山东大学站

华为星河AI高品质校园网络解决方案助力山东大学开学典礼顺利举行
山东大学与华为达成联合创新合作意向
建设中国RISC-V人才生态高地 ——算能与山东大学携手推动产教融合 打造人才培养新范式

华为联合山东大学突破:1200V全垂直硅基氮化镓MOSFET

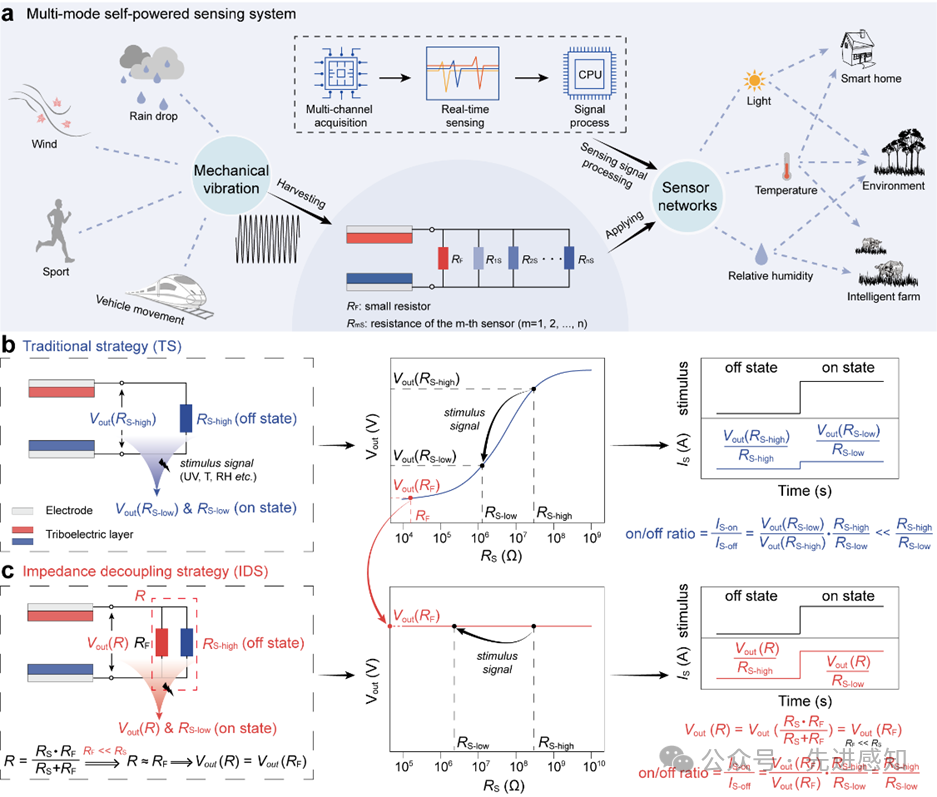
兰州大学:研究阻抗解耦实现高精度自供能多模传感
硅—蓝宝石高精度传感器在井下电子压力计中的应用




评论