 四川大学:研究一种具有四重感知能力的柔性机器人传感器
四川大学:研究一种具有四重感知能力的柔性机器人传感器

在本研究中,作者受自然皮肤感知能力的启发,提出了一种新型的内在柔性机器人传感器,其四重感知功能集成于单一设备中,包括空间接近感知、热接近感知、热触觉感知和机械力感知。凭借这种多功能性,机械和热刺激均可通过接触和非接触模式得到良好解析。所制造的传感器具有良好的柔韧性和内在柔软性,使其能够符合复杂的三维曲面。更重要的是,所有机器人传感器的材料均可完全回收再利用,以构建新一批传感器,显著缓解了资源消耗问题及电子废物带来的环境危害。作为概念验证示范,通过将机器人传感器集成到柔性抓手和机器人手臂上,构建了一个闭环且可靠的人机交互系统。通过利用四重感知功能,成功展示了多种可靠的人机交互场景(例如,人机交互、物体感知与分类、床边临床护理等)。本研究为全面的机器人感知提供了一个可行且多样化的平台。
图文简介

图1. 机器人传感器的设计理念及典型响应特性。(a) 具备四重感知功能的机器人传感器的设计理念与结构布局,用于实现可靠的人机交互。(i) 示意图展示具有多样感受受体的天然皮肤的感知能力,用于物体感知与操作。 (ii) 机器人传感器的组成与结构布局。 (iii) 机器人传感器的四重感知功能,包括热接近感知、热触感知、空间接近感知和机械力感知。(b) 示意图展示连续的热接近与热触感知过程及其典型响应行为。 (c) 示意图展示连续的空间接近与机械力感知过程及其典型响应行为。 (d) 数字图片展示所制备的机器人传感器的柔韧性与柔软性。 (e) 示意图说明机器人传感器的可回收性。

图2. 软体机器人传感器的制备与表征。(a) 示意图,展示软体机器人传感器的三维结构布局及其二维截面视图。(b) 软体机器人传感器的实物照片。(c) 软体机器人传感器中关键组分(即聚乙烯醇PVA、离子液体IL和热塑性聚氨酯ES-PU)的分子组成与结构。(d, e) 自合成的ES-PU材料的傅里叶变换红外光谱(FTIR)及凝胶渗透色谱(GPC)谱图。(f) 光学显微镜图像,显示软体机器人传感器的横截面形貌。(g) 光学显微镜图像,展示微结构导电层顶部工程化金字塔图案。(h, i) TPU层、ES-PU层及PVA/IL层的应力-应变曲线与杨氏模量,采用常规的PET和PI薄膜作为对比。(j, k) 数字照片,展示与三维弯曲及动态变化的软抓手相贴合的软体机器人传感器。

图3. 机器人传感器的感知机制及性能特征。(a) 示意图展示了基于热辐射效应的热感知机制。 (b, c) 传感器对接近冷物体(0 °C)和热物体(65 °C)的响应行为及标定曲线。 (d) 传感器对从远处逐渐接近并移开温暖手掌(距离传感器1厘米)的响应行为。 (e) 示意图展示了基于热传导效应的热触觉感知机制。 (f) 传感器与不同温度物体接触时的标定曲线。 (g) 传感器在热触觉感知中的最低温度检测分辨率。 (h) 传感器对不同稳定环境温度的响应信号。 (i) 示意图展示了基于电场耦合效应的空间接近感知机制。 (j) 传感器在手逐渐接近后又移开的响应行为。 (k) 传感器的空间接近感知标定曲线。 (l) 传感器在不同距离下手部反复接近时的信号变化。 (m) 示意图展示了基于电容参数调制的机械力感知机制。 (n) 传感器的机械力感知标定曲线。 (o) 传感器对不同大小稳定机械力的响应行为。 (p) 传感器在5000次加载-卸载测试中的重复性和可靠性。

图4. 机器人传感器在与人体碰撞预警及人工智能辅助物体识别中的应用。(a) 示意图,显示集成机器人传感器的可编程机器人臂系统,用于人机交互(HRI)。(b) 展示传感器集成在夹持器指端(用于物体操作监测)和夹持器底座(用于危险碰撞预警)上的情况。(c) 当人手逐渐接近机器人臂并在临界距离1厘米处停止时,传感器的响应信号。(d) 软夹持器在抓取、夹持及释放黄瓜过程中的传感器响应行为。(e)用于物体识别的卷积神经网络(CNN)模型结构示意图。(f) 用于测试的20个不同日常物体的数字图片。(g) 显示20个物体识别准确率的混淆矩阵。

图5. 机器人传感器在热接近感知、热触觉感知和人机交互系统反馈控制中的应用。(a, b) 示意图和框图展示了闭环控制机器人系统的主要组成部分和工作原理,包括传感器数据采集与传输、传感器数据处理与可视化、机器人臂运动的闭环控制以及气动夹具的闭环控制功能。(c) 六个不同温度(−40、0、25、50、75、100 °C)的水杯的光学和红外图像。(d) 照片显示软夹具以最小距离1厘米接近物体进行热接近感知。(e) 在接近六个不同温度水杯时传感器的响应信号。具有特定危险温度的物体(−40 °C在深蓝区域和100 °C在深橙区域)可以被识别,软夹具在后续过程中不会抓取这些危险物体。(f) 照片显示软夹具抓取目标物体。(g–j) 在重复抓取四个安全温度物体(0、25、50和75 °C)50次时的传感器响应信号。(k) 示意图展示机器人系统在床边临床护理中的潜在应用场景。(l, m) 照片显示配备作者传感器的机器人系统,从四个不同温度的水杯中识别并取用适合患者的水(例如,25 °C)。

图6. 机器人传感器的回收过程。(a) 示意图展示了基于环保方法的机器人传感器的完整回收过程。(b) 数字图片展示了来自传感器的回收产品,包括ES-PU乙醇溶液、PVA/IL水溶液、银浆碎片和TPU基材。这些回收产品可以再利用于重构新一批机器人传感器。
来源:未来传感技术
-
机器人
+关注
关注
214文章
31691浏览量
224636 -
柔性机器人
+关注
关注
1文章
40浏览量
5065 -
柔性传感器
+关注
关注
1文章
125浏览量
4898
发布评论请先 登录
蔚蓝科技发布新一代消费级四足机器人BabyAlpha A3
人形机器人关节扭矩传感器的详细应用场景及解决方案
它人机器人亮相2026年四川省机器人产业供需对接活动
四川大学、香港城市大学:研发一体化自供电可穿戴传感系统,用于多模式健康监测

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
安森美传感器芯片创新突破机器人感知边界
2025四川省智能传感器产业供需对接大会暨第二届西部智能传感器产业大会圆满落幕
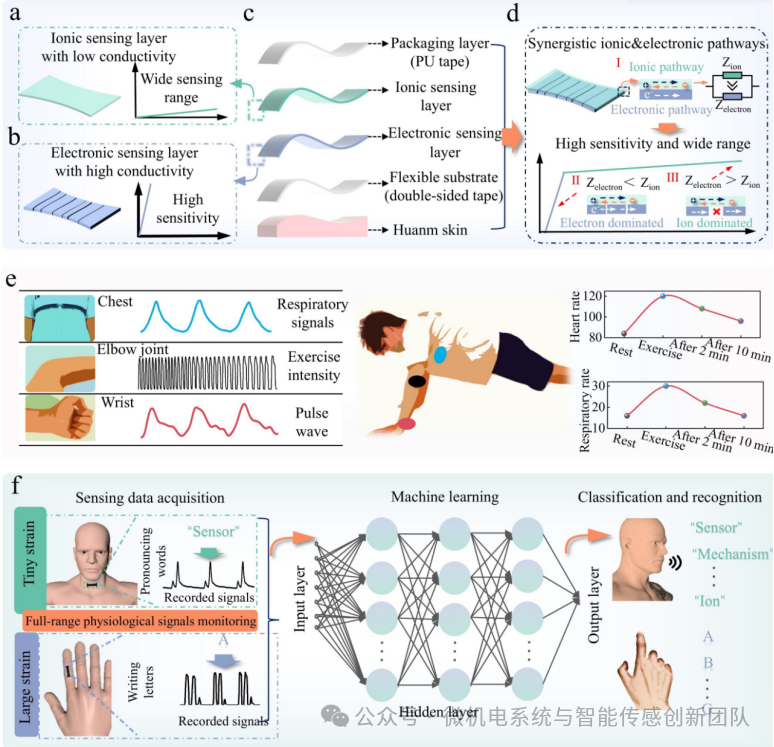
四川大学:协同离子-电子传输应变传感器实现宽工作范围内超高且可调灵敏度
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
软通睿联与四川大学信息分析与决策研究所达成战略合作
成都华微与四川具身机器人深化合作
四川大学商学院EDP培训中心走进云知声
0.01°微小变化精准捕捉,机器人姿态传感器革新

四川大学OpenHarmony技术俱乐部正式揭牌成立




评论