 SLAM在自动驾驶中起到什么作用?
SLAM在自动驾驶中起到什么作用?

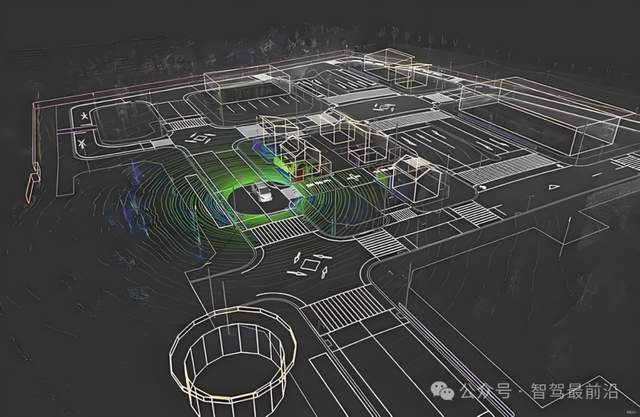
[首发于智驾最前沿微信公众号]在谈及自动驾驶时,经常会听SLAM这项技术。SLAM,即“Simultaneous Localization And Mapping”的缩写,中文称为“同时定位与建图”。SLAM可以解决一个非常关键的问题,那就是让一个移动设备在未知环境中,一边构建周围的地图,一边确定自己在该地图中的位置。这个过程好比一边行走、一边描绘地图,同时实时标注自己的位置。
图片源自:网络
在自动驾驶领域,SLAM不是某一个特定算法,而是一套完整的技术框架与工程体系,其中涵盖传感器、状态估计、特征提取、数据关联、后端优化等多个环节。其通常会结合里程计、惯性测量单元(IMU)、摄像头或激光雷达等传感器,并借助图优化或滤波方法,持续优化定位结果与地图信息。
SLAM可以完成的两大核心任务就是定位与建图。定位负责估计设备在空间中的位置与姿态,建图则将感知到的环境信息组织为可用于导航的地图形式。虽然两者可分头进行,但SLAM则可以让它们的同步与互动,即通过已有地图提升定位精度,又通过新观测持续更新地图,从而形成一个自我增强的闭环系统。

SLAM在自动驾驶中的具体作用
对于自动驾驶系统来说,SLAM可以在缺乏先验地图或环境未知的场景中,提供实时定位与环境建模能力,使车辆具备一定的自主运行能力;还可以在已有高精度地图与实际情况出现偏差时,实现在线修正,避免因自动驾驶汽车完全依赖离线地图所带来的潜在风险。
不同驾驶场景对SLAM的需求其实是不同的。像是在低速城市道路或封闭园区中,视觉或激光SLAM能够构建精细的局部地图,辅助车辆识别车道线、静态障碍物等细节结构;但在高速场景中,SLAM更多用于与惯性导航系统互补,提供短时、高频的位置补偿,提升系统的连续性与鲁棒性。

图片源自:网络
此外,SLAM也可以在感知与定位模块之间建立起关键连接。感知模块识别物体、判断可行驶区域,而SLAM负责将这些信息置于统一的时空坐标系中,形成稳定、可复用的环境表达。规划与控制模块依赖准确的位姿与地图信息来做出决策,若没有SLAM的支持,在GPS信号不佳的区域,车辆就容易出现定位漂移,影响行驶安全。
SLAM还增强了自动驾驶系统的冗余与容错能力。自动驾驶系统通常会融合GNSS、IMU、轮速里程计以及视觉或激光SLAM来进行定位,如果在某一类传感器出现故障或信号丢失时,其他传感器能够接替工作,降低因单一组件失效导致整体定位失败的风险。因此,SLAM不应被简单视作一个独立算法,而是定位系统中不可或缺的关键组成部分。

常见的SLAM实现方式与传感器配合
实现SLAM的技术路径多样,需要考虑具体场景、成本、计算资源与精度要求等。从传感器类型出发,主流方案包括视觉SLAM、激光SLAM、雷达SLAM,以及多传感器融合SLAM。
视觉SLAM主要依赖摄像头,优势在于成本低、信息丰富,能够捕捉颜色与纹理,适合语义理解与细节识别,但对光照变化、天气条件较为敏感。激光SLAM基于激光雷达点云数据,不易受光照影响,几何结构清晰且具备准确测距能力,常用于构建高精度三维地图,不过硬件成本与计算开销较高。毫米波雷达在恶劣天气中表现稳定,并能检测高速移动物体,通常作为辅助传感器,较少单独用于建图。
图片源自:网络
从后端算法来看,SLAM可以分为基于滤波和基于图优化这两大类。像是扩展卡尔曼滤波(EKF)这类基于滤波的方法,适合在线实时估计,计算效率高,但跑的时间一长,误差容易累积起来。而基于图优化的方法,则是把各种观测数据和回环约束都建成一张“图”,然后通过整体优化来保证全局一致性。它最拿手的就是通过回环检测来修正长期漂移,但缺点是比较耗费计算和存储资源。现阶段,很多技术方案中会把两者结合起来,取长补短,让前端滤波器保证实时输出,同时让后端图优化去默默处理关键帧和回环校正。
多传感器融合是提升SLAM性能与鲁棒性的关键。IMU可提供高频姿态变化,在视觉或激光数据短暂缺失时维持运动预测;轮速里程计提供相对位移估计;GNSS则提供绝对位置参考。将这些信息在时间同步与误差建模的基础上进行融合,能显著增强系统在复杂环境中的适应能力。近年来,语义信息在自动驾驶系统中的引入也日益受到重视,通过识别如路灯、建筑转角等稳定要素,SLAM能将临时动态物体纳入地图,从而提升地图的语义质量与长期可用性。

SLAM应用的挑战
想把SLAM技术应用到实车环境中,其实要考虑非常多的问题。首当其冲的是动态环境带来的干扰,传统SLAM默认周围是静止的,但真实路况中车辆、行人不断移动,很容易污染地图、带偏定位。对此可以对动态目标进行检测和剔除,或者把它们单独建模,不让这些“临时特征”影响静态地图的构建。
除了动态物体,环境条件的变化也会直接影响传感器,视觉系统在强光、阴影或夜晚容易失效,激光雷达则在雨雪中点云质量下降。这就要求自动驾驶系统具备多传感器自适应能力,能根据实时数据质量动态调整各传感器的权重,实现平稳降级和功能互补。

图片源自:网络
还有一个绕不开的问题就是尺度不确定与漂移累积。单目视觉SLAM本身无法确定真实尺度,需要借助IMU或里程计来校正;而在长时间运行中,即便很小的误差也会逐渐积累,造成定位明显偏离。这时候要依赖回环检测来修正漂移,但回环本身又受制于场景识别与匹配的准确性。因此,通常结合视觉与激光的回环信息,并配合关键帧选择与地图管理机制,在精度和计算负载之间取得平衡。
实时性与计算资源更是硬约束。自动驾驶对定位频率和延迟要求极高,SLAM系统必须在有限算力下完成所有处理。为了保障关键任务能够实时响应,系统常采用诸如特征点稀疏化、局部地图优化与异步后端处理等加速方式。
传感器之间的时间同步与外参标定也是常见故障来源。微小的时间偏移或坐标转换误差,都可能导致观测数据“对不上”。因此系统必须支持在线标定与健康监测,一旦发现参数异常,就要及时触发重新标定或切换至安全模式。

什么时候要用SLAM?
SLAM并不是在所有自动驾驶系统中都作为核心定位手段。在GPS信号良好、且具备高精度先验地图的高速公路等场景,车辆可以主要依赖GNSS、IMU与地标匹配进行定位,而将SLAM作为备用或局部增强手段。而在隧道、地下车库、城市峡谷等卫星信号受限的区域,SLAM则是维持定位连续性的关键保障。
审核编辑 黄宇
-
SLAM
+关注
关注
24文章
459浏览量
33414 -
自动驾驶
+关注
关注
794文章
14985浏览量
181459
发布评论请先 登录
SLAM如何为自动驾驶提供空间感知能力?

如何设计好自动驾驶ODD?
自动驾驶中毫米波雷达到底有何作用?

自动驾驶系统在遇到事故时是应该起作用还是立刻退出?

高程数据在自动驾驶中有什么作用?
自动驾驶中如何将稀疏地图与视觉SLAM相结合?

自动驾驶中感知、决策、控制都起到什么作用?

太阳光模拟器 | 在汽车自动驾驶开发中的应用

低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?

自动驾驶汽车在隧道、山区如何精准定位?

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

自动驾驶安全基石:ODD

新能源车软件单元测试深度解析:自动驾驶系统视角




评论