 实现完全自动驾驶的关键是什么?
实现完全自动驾驶的关键是什么?

汽车行业正在经历前所未有的新技术涌入。汽车制造商承诺,未来几年内将在公共道路上部署完全自动驾驶车辆,并预测自动驾驶进入大众市场也不太遥远了。但是,尽管汽车制造商和技术公司都渴望加速自动驾驶方面的创新,要实现完全的自动驾驶将需要一种传感技术,不但要使车辆能够“看到”周围的世界,而且要能比人类驾驶员做出更好的反应才行。
目前的传感技术——比如激光雷达(LiDAR)、雷达和摄像头——都存在感知问题(图1),需要人类驾驶员随时准备接管控制车辆。因此,传感器的重要性更为凸显。要实现3-5级的自动驾驶,车辆需要更大数量和更强功能的传感器。本文探讨了当前解决方案的传感功能——例如雷达和LiDAR(光探测和测距)——以及为什么包含FIR(远红外)的融合解决方案将是最终实现3、4、5级自动驾驶的关键。
现有传感技术的局限性
雷达传感器可以检测远处的物体,但却无法识别该物体。另一方面,摄像头可以很有效地确定物体是什么,但仅能在较近的范围内起作用。根据各自的优缺点,如果雷达传感器和摄像头结合使用,就可以为自动驾驶车辆提供更完整的检测和覆盖范围:雷达传感器可以检测道路上稍远的物体,而摄像头则可以在车辆靠近物体时提供更详细的物体图像。
LiDAR传感器也已成为自动驾驶车辆检测和覆盖能力的重要组成部分。与雷达一样,LiDAR通过发出信号并通过信号反射来测量车辆到物体的距离,但它使用的是光波或激光,而不是雷达的无线电信号。虽然LiDAR传感器能够提供比雷达和摄像头更宽的视野,但其成本仍是进入大众市场的阻碍。有些公司为了解决这一问题而推出低成本的LiDAR传感器,但这些低分辨率的LiDAR传感器无法有效监测远处的障碍物,这会影响自动驾驶车辆的反应速度。不幸的是,消极等待LiDAR传感器价格的下降,可能会减缓自动驾驶车辆进入大众市场的节奏。
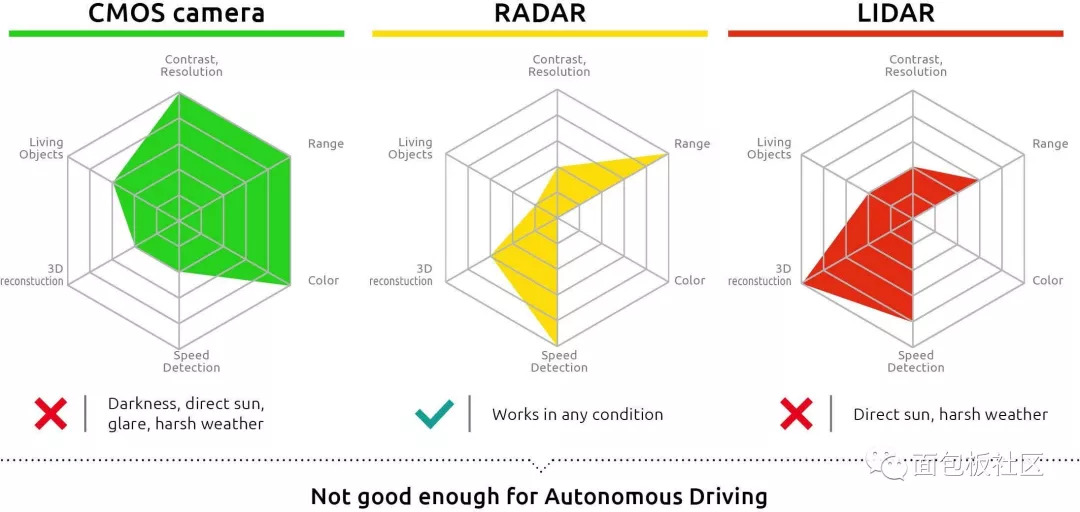
图1:目前的传感技术都存在感知问题。CMOS摄像头、雷达和LiDAR无法在动态照明或恶劣天气条件下发挥作用。(来源:AdaSky)
当前的传感技术除了缺乏完全可见性之外,它们还面临与环境因素有关的额外障碍。要实现5级自动驾驶,无论天气如何,都必须能够实现完全的功能。然而,今天的所有传感器在恶劣天气条件下都会在一定程度上受到影响。例如,虽然雷达仍能在大雾、阴霾或夜间探测到远处的物体,但大多数摄像头都受到视野范围的限制,这阻碍了它们在恶劣天气或黑暗中的“视觉”能力。大多数传感器也会因照明的突然变化而混淆。以车辆进出隧道为例,人类驾驶员需要几秒钟才能适应突然的黑暗或明亮的光线,但是摄像头和激光雷达也好不到哪里去——它们也会因灯光变化而暂时“失明”。
准确的图像检测是当今视觉和感知方案的另一个挑战。虽然摄像头可以成功地检测到人或动物,但是其图像处理软件并不总是能够准确地区分是真人或动物,还是广告牌、建筑物或公共汽车上人或动物的图片。
新兴的要求
汽车制造商和自动驾驶车辆(AV)开发商迫切希望到2020年就在公共道路上部署完全自动驾驶的车辆。但是,在推出2级以上自动驾驶车辆并部署完整的车队之前,传感器必须能够消除现有的视觉和感知弱点,并保证在任何环境和条件下都能够全天候地完全检测和覆盖车辆周围环境。今天,AV仍然需要人来控制的主要原因之一是,其传感器在恶劣天气条件下会失效。
如果没有足够强的传感能力和准确性,以便在所有天气条件下都能够提供安全可靠的运行,完全自动驾驶车辆是不能进入大众市场的。
FIR技术
采用FIR技术的传感器可以克服许多当前传感器面临的可靠性和感知问题。FIR已在国防、安全、消防和建筑领域使用了数十年,已经成为一种成熟且经过验证的技术。这种成熟的技术也已被应用到汽车上了。FIR摄像头使用远红外光波来检测物体自然发出的热量(热辐射)的差异,并将该数据转换成图像。现在汽车上使用的常见光学传感器只能捕捉人眼可感知的图像,而FIR摄像头可以扫描可见光以上的红外光谱,因此可以检测到一般摄像头/雷达/LiDAR无法察觉的物体(图2)。
图2:FIR传感器产生新的信息,可提高分割能力,并提供对车辆周围环境的准确分析。(来源:AdaSky)
带有FIR的VGA热传感器对于高对比度成像具有0.05摄氏度的灵敏度,可以检测到200米距离远的行人。FIR传感器将能够以30或60fps的速度跟踪行人,并检测前方道路。
除了捕获物体或材料的温度之外,FIR摄像头还可以捕获物体的发射率——它是如何有效地散发热量的。由于每个物体具有不同的发射率,因此FIR摄像头可以感测其路径中的任何物体。有了这些信息,摄像头就可以创建一个可以独立并安全运行的道路视觉图画。
在大多数情况下,热FIR还可以检测车道标记和行人的位置(他面向的方向)。然后它可以确定行人正在离开人行道并即将开始穿过对面车道的道路。因此,FIR传感器将能够预测车辆是否有撞击行人的风险。
作为响应,装备有FIR传感器的自动驾驶车辆会减速,以确保在行人有很突然的动作时仍有足够的时间刹车。这就可以保证行人和车辆都会安全抵达目的地。
FIR优势
FIR技术对于自动驾驶的部署和大众市场的接纳至关重要,因为它是唯一能够提供AV安全所需的完整和可靠覆盖的传感器。全球主要汽车厂商之一——宝马公司,正在使用热成像摄像作为其传感器套件的一部分,应用于所有自动驾驶车型。
虽然汽车上的其他光学传感器仅能捕获人眼可见的图像,但FIR摄像头可以提供更全面的感知层。通过扫描可见光以上的红外光谱,FIR摄像头可以检测到一般摄像头/雷达/LiDAR可能遗漏的物体。此外,与必须发送和接收信号的雷达和LiDAR传感器不同,FIR摄像头仅收集信号,这使其成为一种“无源”技术。由于没有移动部件,FIR摄像头可以简单地通过感测物体散热的信号来提供AV周围环境的完全覆盖。
目前,有三家领先的FIR传感器公司:Autoliv、FLIR系统和AdaSky。AdaSky是一家以色列初创公司,最近开发出了一款高分辨率热成像摄像头Viper,可被动收集FIR信号并将其转换为高分辨率VGA视频,而且可以应用深度学习计算机视觉算法来感知和分析周围环境(图3)。
图3:在低光灵敏度下几种最先进的摄像头对比,采用FIR方案的Viper可以检测到其他传感技术无法检测到的物体。(来源:AdaSky)
凭借这项先进的技术,FIR摄像头可以克服复杂的天气和照明条件带来的障碍,而这是目前其他传感技术无法克服的。与FIR摄像头相比,今天的传感器功能是有限的,似乎也不能够提供完全的自动驾驶。即使结合起来工作,现今的传感器也无法在任何情况下都能提供车辆周围环境的全面或准确覆盖。只有FIR传感器可以生成来自不同电磁波段的更深层信息,以显著提高物体和车辆周围环境的分类、识别和检测性能,无论近距离还是远距离。
通过创建车辆周围环境的视觉表征,FIR填补了其他传感器留下的空白,可以在任何天气条件和任何环境中(无论是城市、乡村还是在高速公路上驾驶,或三者的组合)实现全面检测和覆盖。例如,在高速公路上,实现长距离感应至关重要,因为如果检测到物体,车辆就有足够的时间做出停车的决定——即使在高速行驶时也应做到。而在市区,具有更宽的视野是最重要的,因为这样才能检测到人行道和横穿马路的行人和骑自行车者。
虽然FIR对3级自动驾驶方案是必须的,但对4级和更高级别的自动驾驶方案也是重要使能因素。为了实现5级自动驾驶并最终将全自动驾驶引入大众市场,AV开发商预计每辆车应配备多个FIR摄像头,以便实现广泛覆盖并全面监测其周围环境。汽车制造商也青睐使用多个FIR传感器,因为它能提供最高级别的安全性。事实上,美国交通部联邦自动驾驶车辆法规要求,某些关键AV系统必须具有冗余性,而大多数汽车OEM厂商和1级供应商都在准备将多个传感器和其他元器件用作故障安全措施。
每种传感器都有自己的弱点,没有任何传感器能够做到在100%的时间里达到100%的准确,FIR也不例外。这就是通过结合LiDAR、雷达和FIR技术的传感器融合方案实现冗余至关重要的原因。如图4中所看到的,当将所有这些技术分层堆进传感器融合解决方案中时,将可以覆盖所有区域和每个场景的范围。这样FIR就可以实现全自动驾驶。
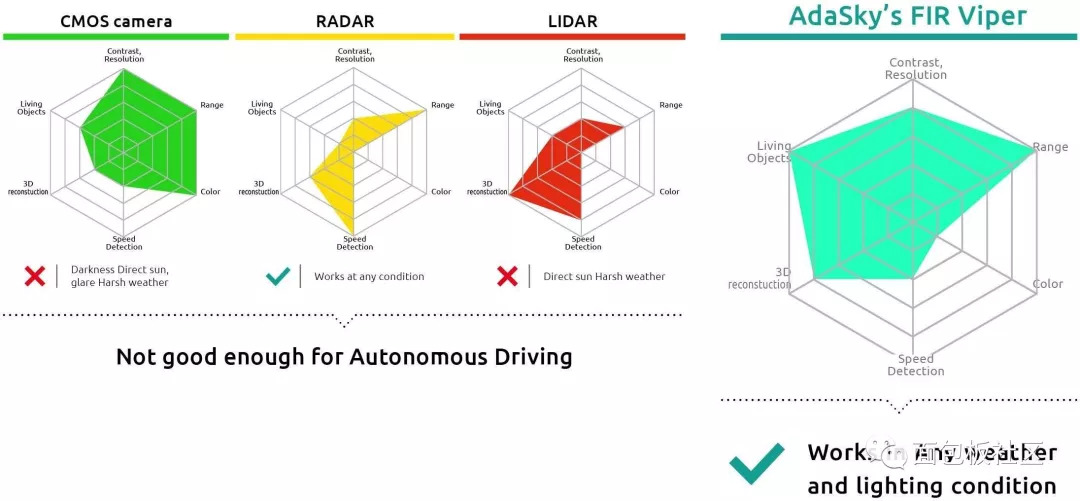
图4:自动驾驶车辆的传感器模式——CMOS摄像头、雷达,激光雷达和FIR的覆盖范围。(来源:AdaSky)
汽车制造商想在下个十年之初就开始在公共道路上部署自动驾驶车辆,要实现这一目标,单靠现今功能有限的传感解决方案是不大可能的。这些传感器一直存在的感知问题意味着如果没有人类驾驶员的监控控制,车辆就无法安全可靠地运行,而要实现真正的5级全自动驾驶也是不现实的。FIR摄像头是唯一能够在任何环境或天气条件下对车辆周围环境进行完整分类、识别和检测的技术,因此是唯一能够将全自动驾驶车辆推向大众市场的传感技术。
-
传感器
+关注
关注
2577文章
55498浏览量
793888 -
FIR
+关注
关注
4文章
152浏览量
35678 -
自动驾驶
+关注
关注
794文章
14987浏览量
181476
原文标题:为什么FIR传感技术是实现完全自动驾驶的关键?
文章出处:【微信号:gh_bee81f890fc1,微信公众号:面包板社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么自动驾驶方案不再强调地图了?

自动驾驶汽车如何实现自动驾驶

Transformer如何让自动驾驶大模型获得思考能力?
如何设计好自动驾驶ODD?
在山区实现自动驾驶的难点在哪里?
不同等级的自动驾驶技术要求上有何不同?
激光雷达传感器在自动驾驶中的作用
想实现自动驾驶,哪些技术非常关键?
塑造自动驾驶汽车格局的核心技术
自动驾驶达到什么技术标准才能称为L3级?
卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

浅析4D-bev标注技术在自动驾驶领域的重要性
自动驾驶安全基石:ODD
新能源车软件单元测试深度解析:自动驾驶系统视角




评论