 STEVAL-ROBKIT1机器人评估套件技术解析
STEVAL-ROBKIT1机器人评估套件技术解析

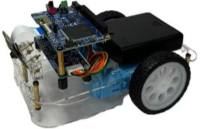
STMicroelectronics STEVAL-ROBKIT1机器人评估套件是一款全功能套件,旨在为机器人技术和应用的开发提供平台。该套件采用模块化设计,包含三块板:主板、电机控制板和成像板。主板由STM32H725 MCU供电,其中集成了各种功能,同时控制电机板和成像板。电机板基于STM32G071微控制器,专门用于电机控制和驱动,利用电机驱动器调节机器人的运动速度和方向。成像板配有飞行时间(ToF)传感器和摄像头模块,可感知周围环境并与其进行智能交互。
数据手册:*附件:STMicroelectronics STEVAL-ROBKIT1机器人评估套件数据手册.pdf
惯性测量单元(IMU)和磁力计提供精确的定位和运动感知,可增强STMicro STEVAL-ROBKIT1的功能,对于动态环境中的导航和稳定性至关重要。低功耗BLUETOOTH ^®^ (BLE)模块让无缝无线通信更便利,支持移动接口控制。同时,可靠的固件使机器人能够自主移动,并允许用户运行不同的人工智能算法。
特性
- 模块化设计,用于不同机器人应用
- 六轴IMU传感器,用于加速度计
- 磁力计,实现位置精度
- 通过低失真数字麦克风,实现音频信号检测
- 通过蜂鸣器,实现声音指示
- LED和按键,用于用户界面
- 40引脚Raspberry Pi兼容GPIO连接器
示意图
STEVAL-ROBKIT1机器人评估套件技术解析
核心架构与模块设计
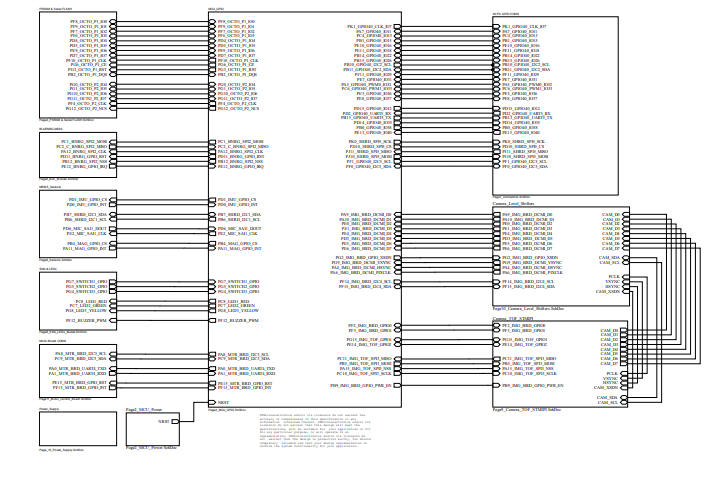
STEVAL-ROBKIT1是STMicroelectronics推出的模块化机器人开发平台,由三块核心板卡构成:
- 主控板:搭载STM32H725高性能MCU(双核Cortex-M7/M4),集成PSRAM(64Mb)和串行Flash(128Mb),支持实时数据处理与复杂算法运行。
- 电机驱动板:基于STM32G071微控制器,集成STSPIN240电机驱动器,支持双路H桥控制,峰值电流达3.5A,具备编码器接口实现闭环控制。
- 感知板:集成ToF传感器(测距精度±1%)、单色摄像头(DCMI接口)及6轴IMU(LSM6DSV16BX),支持环境感知与导航。
关键硬件特性
- 传感器融合
- 无线连接
- 电源管理
- 宽电压输入(5.9V-45V),采用L6981(5V/3A)和L6982(3.3V/3A)DC-DC转换器,效率达92%。
- 低功耗设计:STM32H7支持动态电压调节(DVS),空闲模式电流<10μA。
典型应用场景
- 自主导航机器人
- 通过ToF+IMU实现室内建图(如ROS导航栈)。
- 电机驱动板支持PID调速,响应时间<1ms。
- AI视觉开发
- 摄像头输出720p@30fps,兼容OpenMV等图像处理框架。
- 主控板预留TensorFlow Lite Micro部署接口。
- 教育示教
- 模块化设计支持快速更换传感器(如替换为LiDAR)。
- 提供完整的Arduino/STM32CubeIDE开发示例。
开发资源与生态
- 软件支持
- 硬件扩展
- 支持STEVAL-MKI系列传感器插接(如气压计、气体传感器)。
- 兼容STM32 Nucleo扩展板(通过Morpx接口)。
设计建议
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
147文章
19240浏览量
405201 -
机器人
+关注
关注
214文章
31650浏览量
224565 -
评估套件
+关注
关注
0文章
265浏览量
13479
发布评论请先 登录
相关推荐
热点推荐
【mBot申请】智能机器人的检测评估
申请理由:想通过一款适于控制智能机器,可称之为智能机器人的开发套件,外设加入各类传感器,实现智能,检测,反馈为一体的闭环系统,来进行对该类智能机器人的性能
发表于 11-30 15:56
群舞蹈机器人表演
群机器人协作和舞蹈套件采用Arduino控制器完成五个两轮教育机器人的协同控制和舞蹈,并能够方便地扩展机器人的数量,完成更加复杂的协作或者舞蹈任务。每个个体
发表于 03-24 11:36
【Landzo C1申请】基于Landzo C1 机器人套件智能遥控系统
申请理由:由于我最近也在学习制作Arduino智能小车,并做出来了基本的功能,但由于是利用万用板焊接到一起,各个模块连接挺浪费时间,看到了Landzo C1 机器人套件发现一切都变的简单起来,希望把
发表于 05-24 16:20
Landzo C1 机器人套件资料在哪
`Landzo C1 机器人套件资料在哪儿呢,现在申请成功,正喜悦着呢,想提前进入试用状态,可是找不到资料。申请时看到有资料的,是不是要购买才有的。`
发表于 05-24 17:13
机器人、协作机器人和移动机器人,你分的清楚吗
防护装备,并且没有加入任何安全功能。2016年后还有ISO/TS 15066可供使用。该技术规范参考ISO 10218-1和ISO 10218-2,给出了对“机器人系统和人员共享同一工作空间”的“协作
发表于 10-30 11:33
什么是TI-RSLK机器人系统学习套件
首先说说什么是TI-RSLK(中国版)机器人系统学习套件吧。TI-RSLK 中国版是一款适合用于机器人入门学习的移动机器人套件,该
发表于 02-11 06:42
【开发教程1】人形街舞机器人-套件检测教程
多自由度人形双足舞蹈机器人套件检测教程——机器人开发系列配套资料:https://www.fengke.club/GeekMart/su_fV1WzKsGQ.jsp 配套视频:http
发表于 04-22 14:14
【教程1】人形街舞机器人-套件检测教程
多自由度人形双足舞蹈机器人——疯壳·机器人开发系列套件检测教程内容简介本文档主要介绍在如何验证多自由度人形双足街舞机器人套件正常,包括具体线
发表于 08-12 15:55
ST NPI 专区 | 新开发套件 【STEVAL-ROBKIT1】 机器人应用评估平台
STEVAL-ROBKIT1是一个用于机器人技术和应用开发的综合机器人评估平台。该套件的模组化设
基于意法半导体 STEVAL-ROBKIT1 的机器人应用方案
在机器人技术飞速发展的今天,STEVAL-ROBKIT1 提供了一套全面的机器人开发解决方案,专为开发者和工程师设计,助力实现从概念到产品的快速落地。

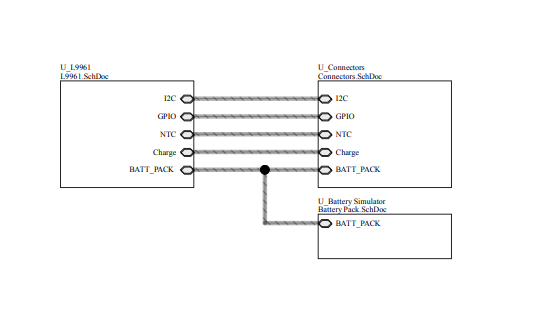
STEVAL-L99615C评估套件技术解析与应用指南
STMicroelectronics STEVAL-L99615C评估套件集成了扩展板,搭载L9961和NUCLEO-G071RB STM32 Nucleo-64开发板。这款评估



评论