 柔性触觉传感器的主要技术路线
柔性触觉传感器的主要技术路线

触觉传感阵列是由多个触觉传感单元构成的触觉传感器。触觉传感单元能测量单点的接触力,而触觉传感阵列由于集成了多个传感单元,因此具备分布式接触力的检测能力。目前,触觉传感的实现方法有多种,按其原理可分为压阻式、压电式、电容式、流体式、光学式、晶体管式等。
1.压阻式触觉传感
压阻材料在受到外界压力时其自身电阻值会发生变化,通过检测电阻值的变化可对外界施加的压力进行测量,因此将压阻材料作为触觉传感器的压力敏感材料可实现触觉力的检测。
常见压阻材料的制备可通过在绝缘的高分子聚合物中混合导电物质,形成具有压力敏感特性的复合材料。导电颗粒、导电纳米线等导电材料分布在绝缘的聚合物基体中,受压时导电材料间的距离变小,导电通路增多,从而使整体电阻变小。
2012年,美国斯坦福大学Tee等将具有纳米微结构的镍颗粒与超分子聚合物混合,制备出高灵敏的压阻材料,并用于柔性电子皮肤的设计,研制的柔性电子皮肤表现出良好的接触力检测性能。
2014年,美国加利福尼亚大学Takei等在聚合物绝缘基体内加入了导电CNT(碳纳米管)和AgNP(纳米银颗粒),作为触觉传感阵列的敏感材料,如图1所示,当传感阵列受到拉伸、压缩以及弯曲时,其电阻值均会发生明显变化。
除了导电聚合物外,具有压阻效应的金属薄膜也被用在触觉传感阵列的设计制造中。
2008年,韩国高丽大学Kim等设计了PI(聚酰亚胺)基底的触觉传感阵列,PI基底上制造有镍铬合金,受力变形时其电阻发生变化,从而实现触觉力的测量。
2016年,韩国延世大学Park等使用 MoS2和石墨烯电极制造的触觉传感阵列具有较高的检测灵敏度,且测试重复性优良。利用具有压阻效应的金属薄膜作为触觉传感阵列的压力敏感材料,使得传感阵列具有动态性能好和响应速度快的特点。
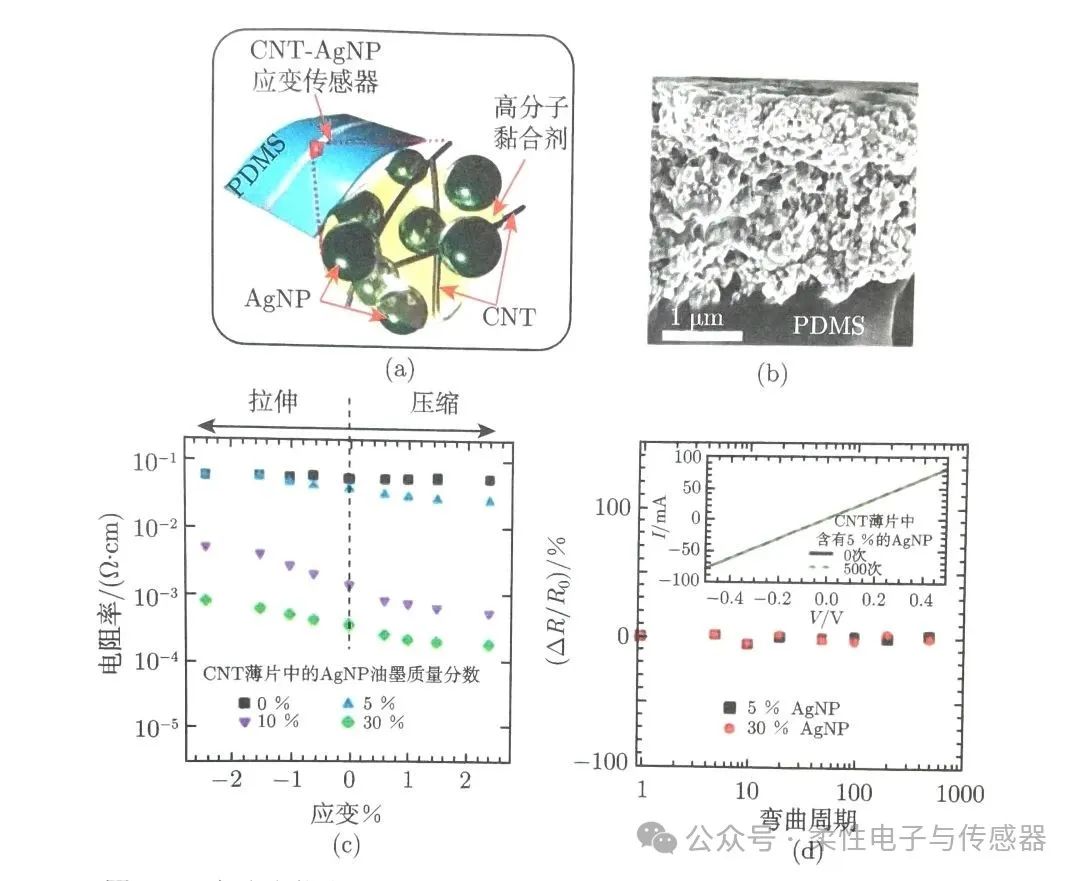
图1 在聚合物中加入碳纳米管和纳米银颗粒制造成的导电聚合物
2.压电式触觉传感
压电材料在受到外界压力时会产生电荷,通过测量产生电荷量的多少,即可对施加的外力进行检测。PVDF(聚偏氟乙烯)经过极化处理后具有压电特性,可用作触觉传感器的压力敏感材料。
2006年,日本大阪大学Hosoda等将PVDF膜随机分布在仿人手指中,手指与物体的接触使PVDF薄膜产生电荷,将电荷信号转化为电压即可实现手指与物体间接触力的测量。
2016年,中山大学Li等设计了平面型的压电薄膜作为触觉传感单元的力敏感层,如图2所示,受力时压电薄膜的上下表面产生电荷,通过晶体管对产生的电荷和电压进行放大,从而实现触觉力的测量。
2016年,浙江大学俞平等在触觉传感阵列的每个传感单元中集成了四个PVDF 薄膜,当三维力施加在传感单元上时,四个 PVDF 薄膜产生不同的电荷量测量电荷的差异即可解耦计算得到触觉传感单元所受到的三维力。
对于压电式触觉传感,压电材料产生的电荷量会随着时间的推移变少,故压电式触觉传感器的静态检测性能较差,但适用于动态力的检测。
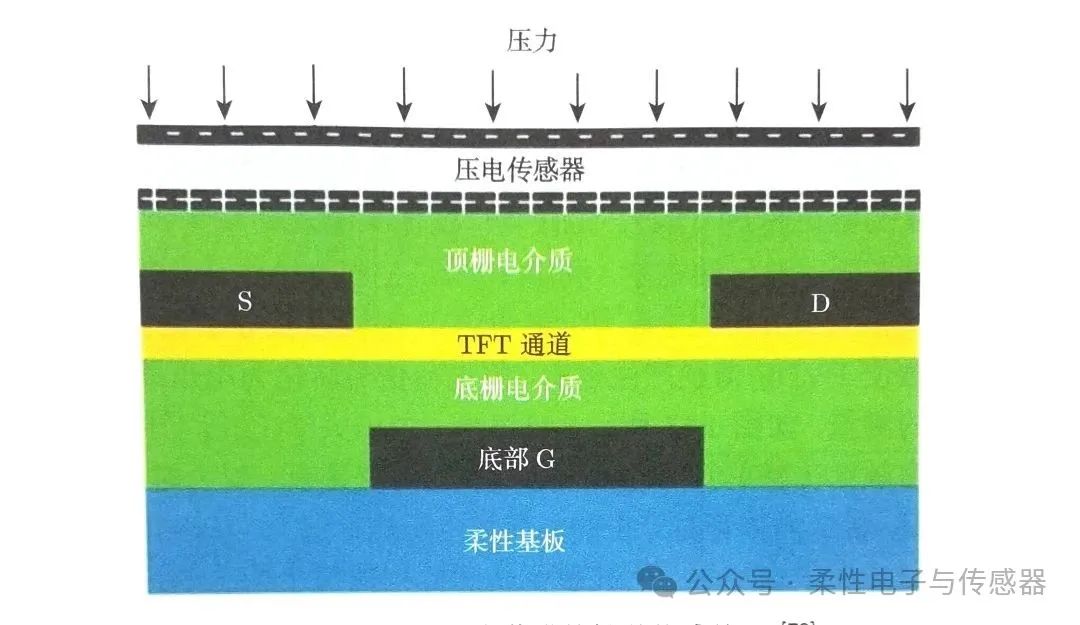
图2 基于压电薄膜的触觉传感单元
3.电容式触觉传感
电容通常包含上下两个电容极板和中间介电层。在外力作用下,介电层受到压缩,使上下电容极板间的距离发生变化,从而产生电容值的变化。
采用平板电极作为电容极板的电容式触觉传感阵列具有结构简单的特点,容易实现法向触觉力的测量。
2008年,美国田纳西大学Pritchard等在两个平板电极间设计了一层聚对二甲苯薄层作为介电层,制作成10x10的触觉传感阵列,压力作用下聚对二甲苯被压缩,电容值增大,以此来检测触觉力的大小。
香港城市大学 Zhang 等设计了一种基于 PDMS 介电层的电容式触觉传感单元,并制作了3x3的传感阵列,如图1.14所示。电容极板的多种触觉传感单元结构,获得了良好的三维力检测性能。
2012年,日本国家先进工业科学技术研究所Takamatsu 等利用表面覆盖有导电油墨的尼龙纤维编织成网状织物,在网状节点处形成电容,以检测分布式的触觉力。电容式触觉传感器容易获得较高的接触力检测灵敏度,且制造简单。
意大利技术研究院的 Viry 等以铜/锡涂层织物为导电板,以氟硅片为介电层制成柔性三维力传感器,并被嵌在PDMS封装层内,其结构示意及实物照片如图3所示。研究人员以底部四极板的平均电容变化量反映法向力的增减,以相邻极板间电容变化量之差来计算切向力的大小。因氟硅片的低附着性,上下极板间将自然产生约150μm厚的空气薄层;而导电织物的经纱和纬纱之间亦存在一定空隙,故传感器对微小载荷的检测非常灵敏:当外力小于32mN时,其灵敏度可达14.22 N-1。受读取系统的限制,柔性三维力传感器的测力上限为12N。
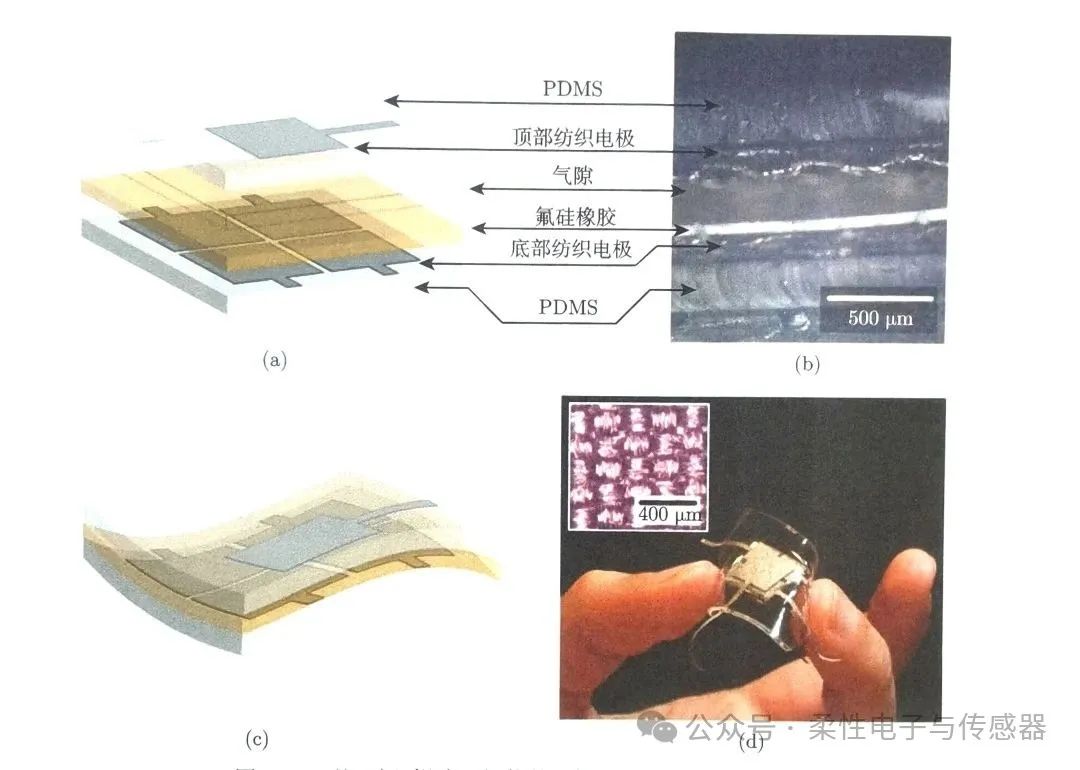
图3 基于铜/锡涂层织物的柔性电容式三维力传感器
4.流体式触觉传感
流体式触觉传感可采用导电流体和非导电流体。研究者们在触觉传感阵列中设计了直线型、圆形、螺旋线型等形状的微流道并填充注入导电流体,微流道在外力作用下被挤压变形,其长度和横截面积发生改变,导致微流道内流体的电阻产生变化,从而实现触觉力的检测。
2013年,美国南加利福尼亚大学Roy等将导电流体填入机械指头,在外力作用下指尖内的导电流体被压缩,其电阻值发生变化,通过测量电阻值的变化即可实现对外力的检测,如图4所示。
2015年,美国卡内基梅隆大学Chossat等在触觉传感阵列内设计了网状的微流道并填充导电流体,在网格的边缘引出电极,利用阻抗成像技术对网状微流道的受力进行解耦,成功检测出接触力的分布情况。
在非导电流体的应用方面,2012年,日本庆应义塾大学Ahmad Ridzuan等将绝缘流体填充到触觉传感阵列每个传感单元的介电层中。当触觉传感阵列受力时,介电层被压缩,电容值发生变化。由于介电层为流体填充,传感阵列具有较高的柔性。采用流体作为触觉传感阵列的压力敏感元件,制造的传感阵列虽具有较高的柔性,但存在流体泄露的风险。
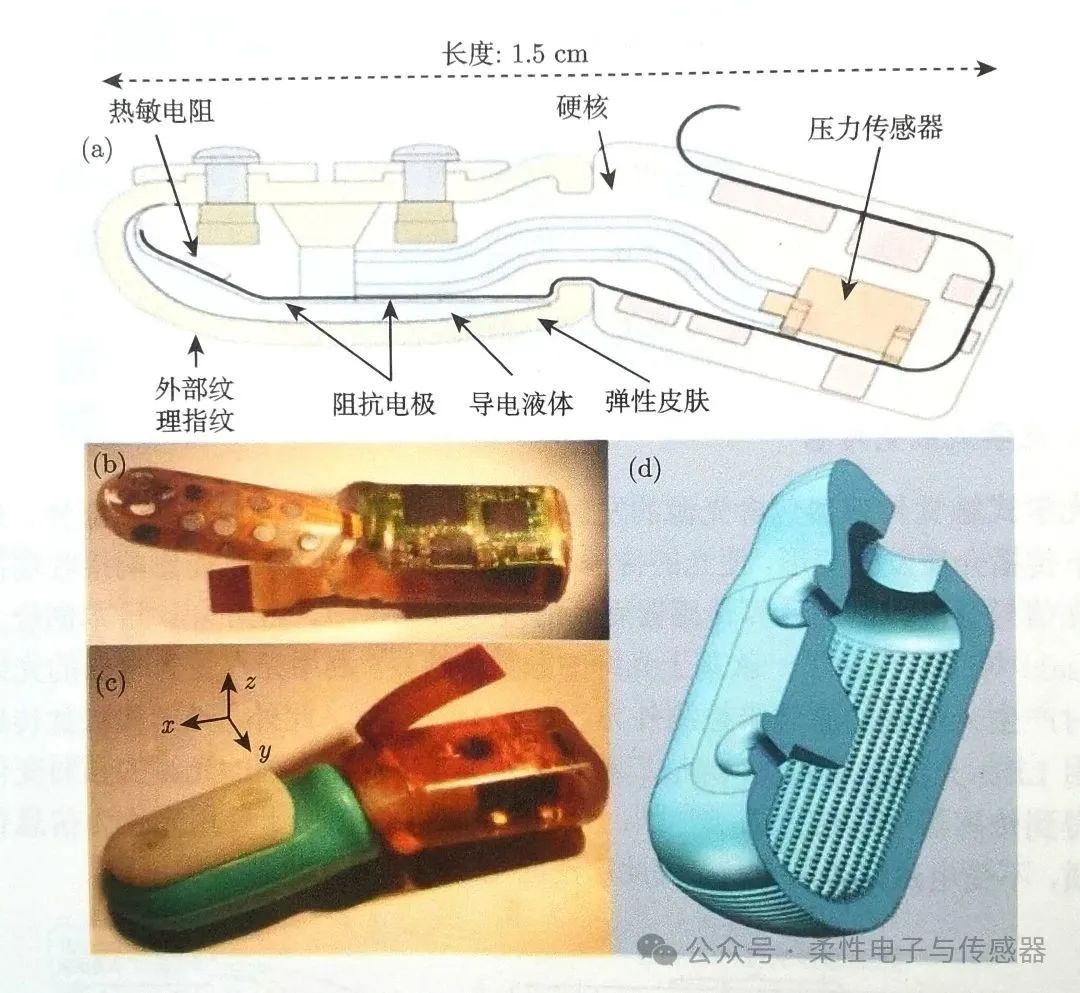
图4 集成了流体式触觉传感器的机械指头
5.光学式触觉传感
光学式触觉传感器包含光源的发射端、接收端和光的传播介质三部分。外力作用下传播介质发生变形,使光的传播方向和强度发生变化,从而影响接收端接收到的光信号强度,以此计算传感器受到的接触力。
2016年,日本创价大学Yamazaki 等设计了一款基于光纤的触觉传感器,利用光在受力弯曲的光纤中传播时产生光泄漏的原理来检测外力,如图5所示。
此外,光学式触觉传感器常使用 LED光源发送光线,光敏二极管接收光线,从接收到的光线的强弱变化可计算得到传感器受到的外力。光学式触觉传感器由于使用光作为信息传递的介质,不受电磁信号的干扰,因此广泛应用于外科手术机器人领域。
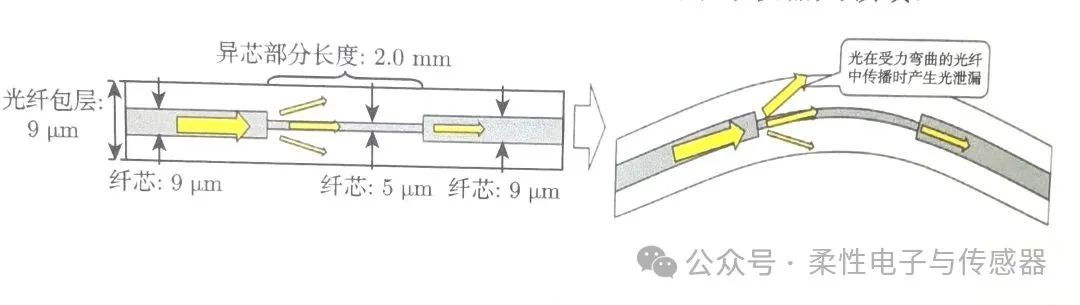
图5 基于光纤的触觉传感器的工作原理
6.晶体管式触觉传感
晶体管在触觉传感器中的作用是对触觉敏感元件的电信号进行放大,增强传感器的信噪比。有机场效应晶体管得益于其高柔性的特点,能很好地与柔性触觉传感器进行集成,因此被诸多研究者所采用。
2016年,意大利卡利亚里大学 Spanu 等在触觉传感单元的压电薄膜敏感元件上制造了有机场效应晶体管,对压电薄膜的电荷信号进行放大与测量,实现触觉力的检测,如图 6所示。
2010年,美国加利福尼亚大学伯克利分校Kuniharu Takei等在纳米线有机场效应晶体管阵列上覆盖导电橡胶层,制作出有源触觉传感阵列,利用有源晶体管的信号放大作用来提高触觉传感阵列的检测灵敏度,如图7所示。
集成了晶体管的触觉传感阵列,把部分信号处理电路直接设计在触觉传感阵列上,使其具有更高的“智能”,并可显著减小外围电路的复杂程度,但缺点是传感器结构复杂制造工艺烦琐、成本昂贵。
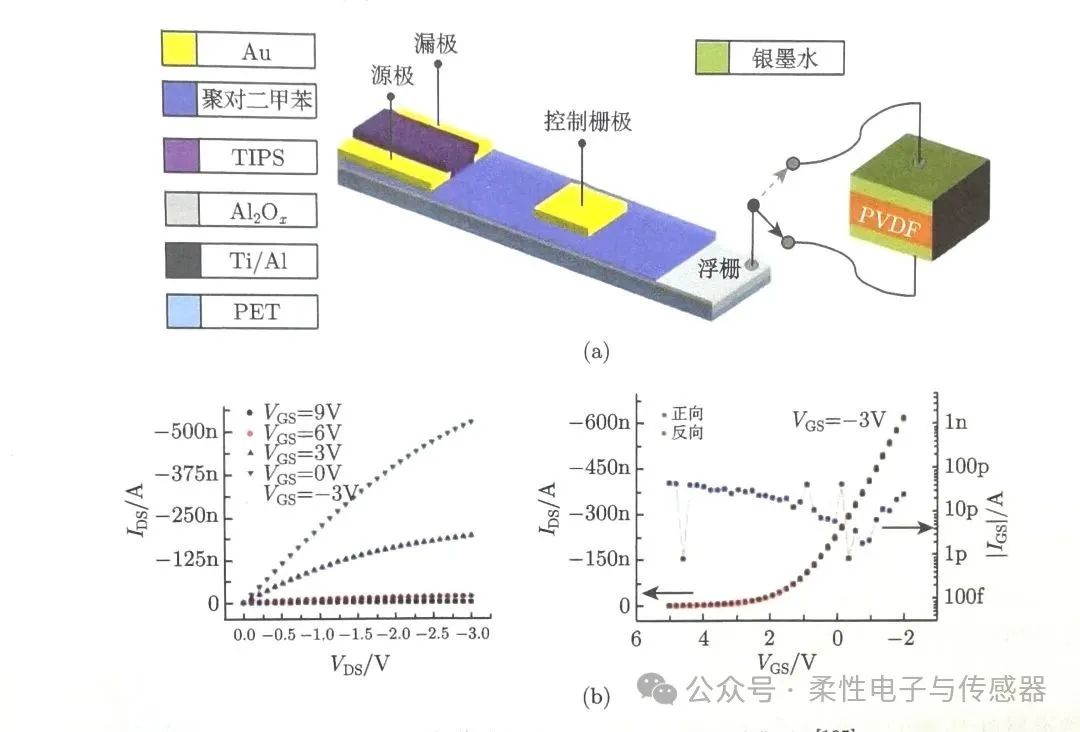
图6 压电薄膜与有机场效应晶体管的集成
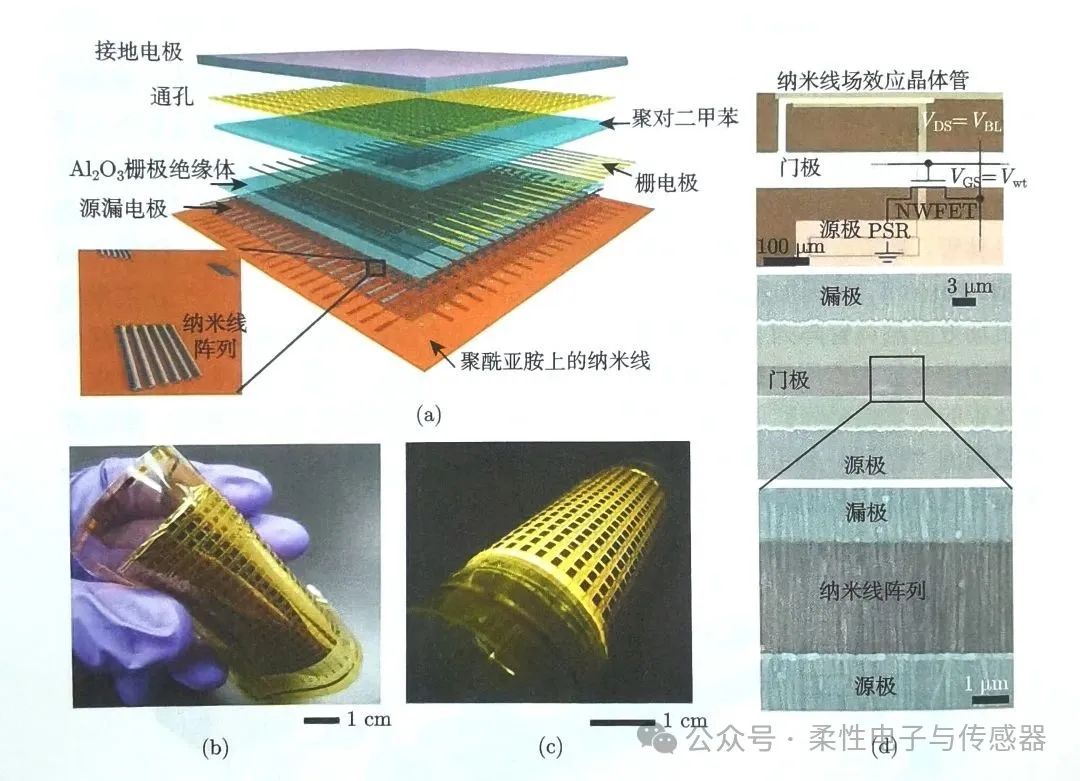
图7 导电橡胶与有机场效应晶体管的集成
7.其他类型触觉传感
除了上述几种触觉传感方式外,还有基于铁电效应、声波、电场、磁场等的触觉传感方式。
美国康奈尔大学的Zhao 等以透明的聚氨酯橡胶为核心,以具有高吸光性的聚硅氧烷复合材料为覆盖层制作了高弹性的波导管。根据光功率在波导管内与传播距离呈负相关关系的原理,研究人员在波导管两端分别安置了发光二极管和光敏二极管以使其具有反应拉伸应变、弯曲曲率以及外界载荷的能力。在测力实验中,研究人员发现,当力的作用面积小于6mm2时,波导管传感器将同时具有较高的线性度与灵敏度。之后,Zhao等将三条波导管整合入一根中空的硅橡胶指型执行器中,并以此为基础制得了智能假肢手。后续实验证明该假肢手可对物体的外形、材质、硬度进行识别。
韩国成均馆大学的 Ho 等利用石墨烯及其衍生物研制了多模式的柔性透明电子皮肤。该电子皮肤共有6x6个传感单元组,每个单元组包含一个基于氧化石墨烯的阻抗式湿度传感器、一个以PDMS为介电层的石墨烯电容式压力传感器和一个基于还原氧化石墨烯的电阻式温度传感器。在将压力传感器的表征方式设为电容的变化量后,三类传感器的输出将互不影响。后续的热风吹拂、单/双指按压、呼气等实验证明了该电子皮肤具有同时检测温度、湿度、压力等物理量的能力。
注:以上内容主要来自:
《分布式柔性触觉传感阵列—设计、建模与检测应用》 汪延成 梅德庆 著
来源:柔性电子与传感器
审核编辑 黄宇
-
触觉传感器
+关注
关注
4文章
127浏览量
10439
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
北京理工大学与中国科学院:研究自适应模量压力传感器阵列,赋能无线触觉可视化

西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能
中国科学院金属研究所:柔性单通道多功能热电半导体传感器件研究取得重要新进展

以触觉为桥,定义智能体验——PPS触觉传感技术赋能多领域创新

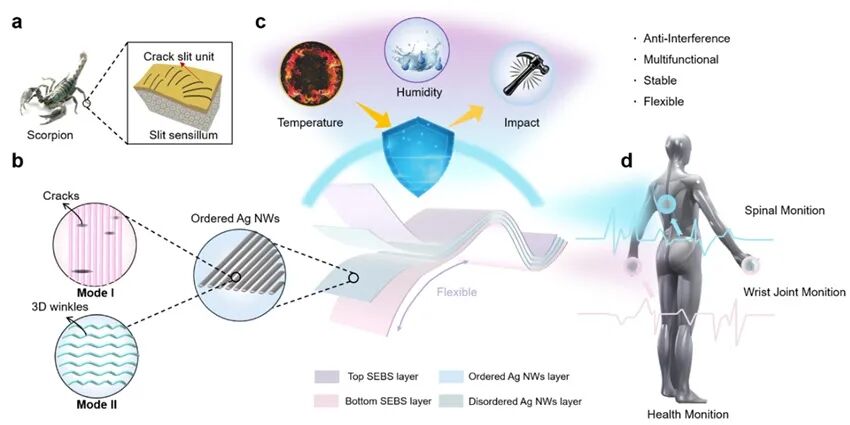
中国科学技术大学:研究有序纳米线结构用于抗干扰双模态柔性触觉传感器
进入多模态时代!测量采样频率升至1000Hz,三大机器人触觉传感器新品发布
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)

NVIDIA Isaac Sim仿真平台助力他山科技实现触觉传感技术突破
最新分析:触觉传感器技术演化,电子皮肤市场空间将达155亿元
A股国产力传感器龙头柯力传感投资北京一家触觉传感器公司“他山科技”
重新定义具身触觉感知,专注柔性纤维传感器的「矩侨工业」获数千万元Pre-A轮融

触觉传感器已在亚马逊仓储机械臂率先商用 新增形式有望加速市场增长节奏




评论