 基于近红外光的机器人非接触式传感系统
基于近红外光的机器人非接触式传感系统

随着物联网和5G技术的快速发展,使人与机器之间能够进行信息交换的传感器正逐渐从柔性触觉传感器扩展到非接触式传感器。目前,触觉传感器主要基于电阻、电容、压电、摩擦电和磁性。触觉传感器可以检测接触物体的接触力、温度、湿度、振动、材料、柔软度等特性,有利于人/机器人与环境的互动。然而,触觉传感器在与待检测物体接触时在近视中有一个盲点,并且受到环境光的限制。此外,触觉传感器不可避免地会受到机械疲劳和稳定性差的影响,限制了它们的实用性和通用性。由于非接触式传感器可以以更简单直接的方式实现复杂的人机交互,因此它们被广泛应用于安全导航、遥感、智能医疗、电子屏幕和智能机器人。
非接触式传感器的一个挑战是传感性能和稳定性之间的矛盾。据报道,实现非接触式传感的方法主要包括磁性、湿度、红外辐射、摩擦电、电容和视觉传感器。其中,湿度和电容传感器只能检测到有限数量的简单类型,如接近和滑动。磁传感器需要磁性附件,导致交互体验低,而视觉传感器不能在黑暗环境中使用。目前用于非接触式手势识别的摩擦电传感器仍然存在表面电荷存储能力弱的问题。此外,非接触式传感器面临着一个关键挑战,即它们的输出性能随着工作距离的增加而降低,限制了它们在非接触式传感领域的进一步应用。传统非接触式传感器的工作距离非常有限。因此,许多非接触式传感器在长距离下无法实现高精度和高稳定性。近红外(NIR)光因其易于获取和高能量特性,也可用于非接触式控制领域。大多数报道的作品使用红外辐射或可见光谱来实现非接触式传感,但它们容易受到环境光和温度等外部环境的影响。因此,开发精度高、稳定性好、适应多种环境的非接触式传感器具有重要意义。
水凝胶因其独特的3D结构和优异的力学性能而广泛应用于柔性可穿戴领域。然而,由于水作为溶剂体系的影响,水凝胶在低温或高温环境下容易损坏其机械性能和完整性,这限制了它们的应用范围,特别是在柔性电子领域。因此,研究人员为开发具有良好机械性能和环境稳定性的凝胶做出了不懈的努力。与水凝胶相比,有机凝胶(有机水凝胶)近年来受到了广泛关注,其主要优点之一是对液相具有更宽的选择性,从而显示出更多的应用领域。尽管有机凝胶的导电性较差在实际应用中可能需要进一步处理,但它们在非接触式传感器领域显示出良好的机械耐久性和环境稳定性。例如,有机凝胶的热稳定性可以通过所选溶剂的沸点来调节。目前,有机凝胶的分类主要包括含有极性液体的有机凝胶(或油凝胶)、具有在有机溶剂中膨胀的聚合物网络的软材料,以及用于区分有机凝胶和水凝胶的有机填充液体。对于二元溶剂体系,有机凝胶和水凝胶之间存在明显的重叠。在这种情况下,凝胶的定义可以根据主要溶剂或功能最强的溶剂的性质来确定。因此,在这项工作中,将PAM琼脂TABP有机水凝胶中的水挥发后的样品命名为PAM琼脂TAPP有机凝胶。
本文亮点
1. 本工作开发了一种智能红外光热非接触式传感系统,提供长距离、高精度的非接触式感应。
2. 设计了一种基于黑磷(BP)的复合有机凝胶作为活性材料,该凝胶具有优异的光热性能和环境稳定性。这种材料可以通过红外热成像仪监测的各种图案化掩模检测近红外(NIR)光产生的图案。所构建的非接触式传感系统能够准确识别26个字母,准确率高达99.4%。
3. 即使是小尺寸的非接触式传感器也可以在宽温度范围内、长工作距离、不同电流强度和黑暗条件下保持高灵敏度和稳定性,表现出卓越的鲁棒性。
4. 结合机器学习方法,证明了非接触式传感系统在模式识别和人机交互方面的优势。
图文解析
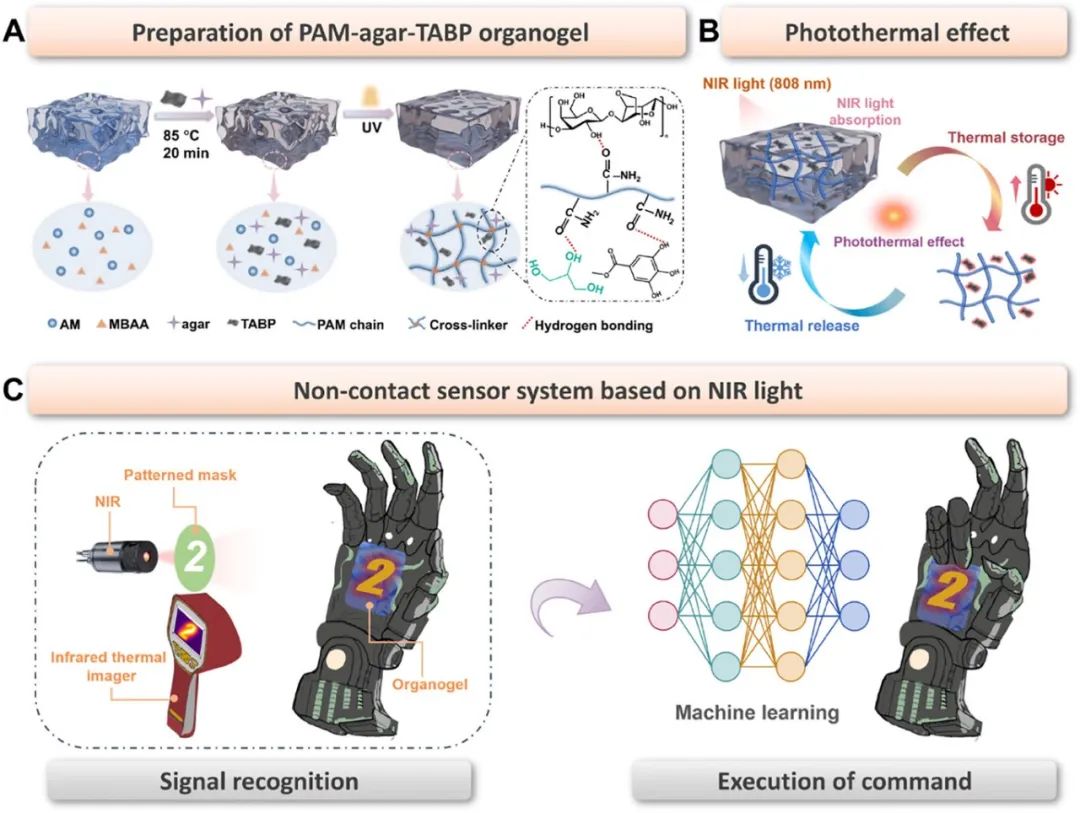
图1. 非接触式传感器系统的设计和结构。A)PAM琼脂TABP有机水凝胶的制备工艺和B)光热效应说明。C)基于近红外辐射和机器学习的非接触式传感器系统。在近红外光的激发下,红外热像仪监测不同掩模照射在凝胶材料上的图像。
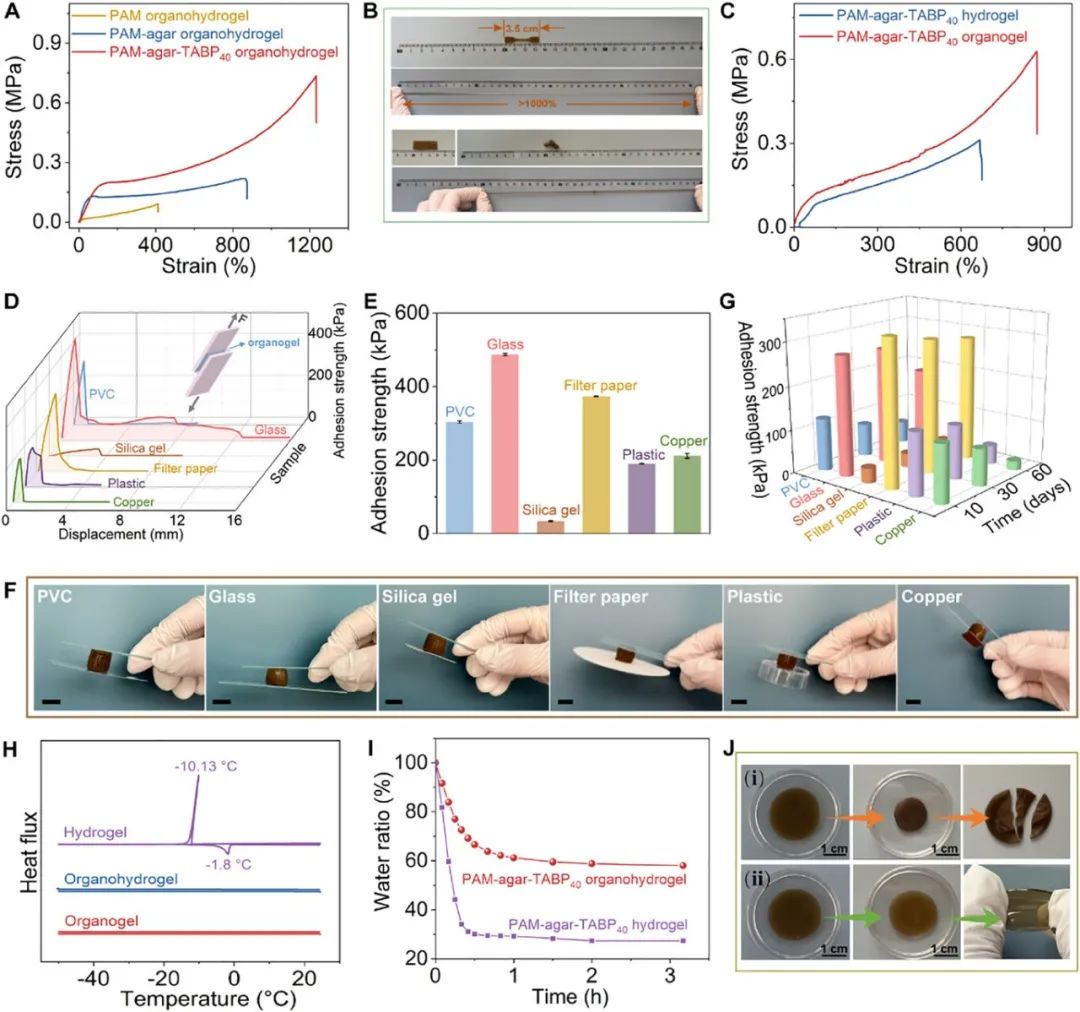
图2. PAM-agar-TABP40凝胶的机械性能和粘附性能。A)不同PAM基有机水凝胶的拉伸应力-应变曲线。B)PAM-agar-TABP40有机水凝胶机械性能的光学照片。C)PAM-agar-TABP40水凝胶和有机凝胶的拉伸应力-应变曲线。D)粘附力学曲线和E)厚度为0.5 mm的PAM-agar-TABP40有机凝胶的相应粘附强度(插图是搭接剪切试验的说明)。F)PAM-agar-TABP40有机凝胶对各种基材的粘附行为(比例尺=2 cm)。G)不同时间后厚度为0.5mm的PAM-agar-TABP40有机凝胶的粘附稳定性。H)基于PAM-agar-TABP40的凝胶的DSC曲线。I)PAM-agar-TABP40凝胶在60°C下的重量变化。J)PAM-agar-TABP40水凝胶(i)和有机水凝胶(ii)在60°C下24小时后的照片。
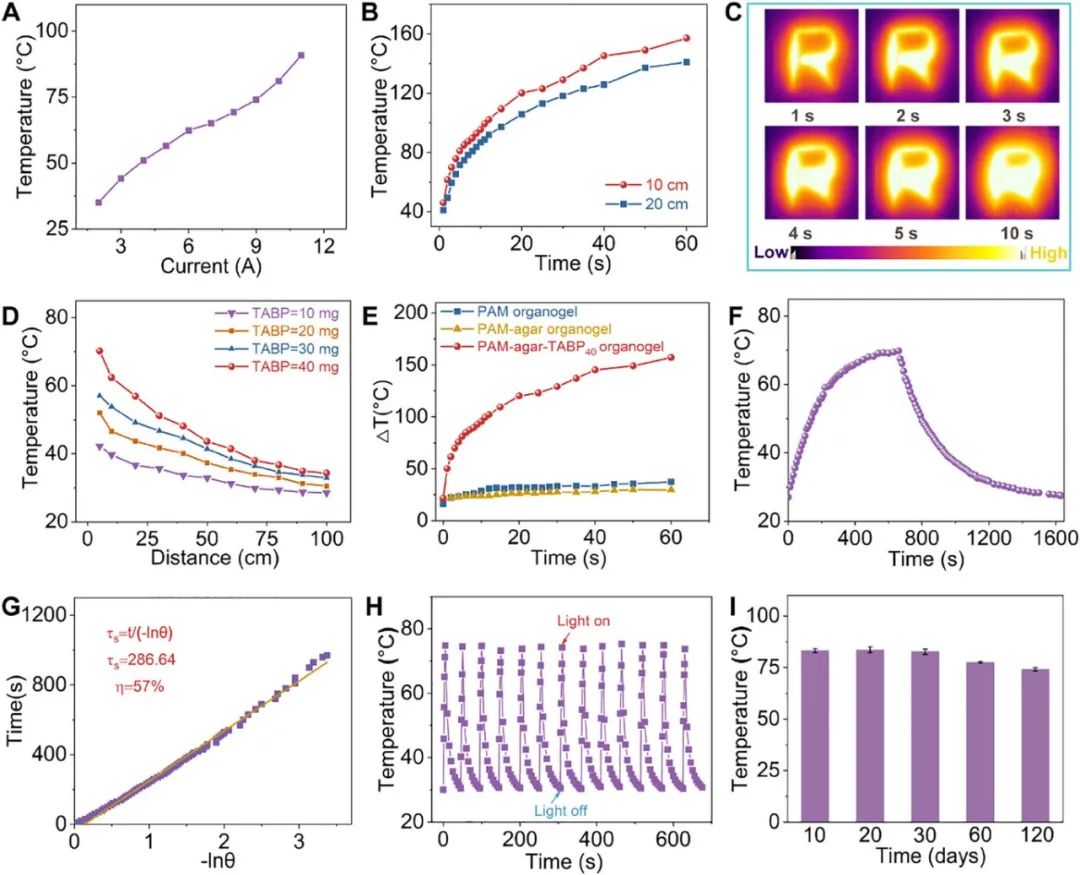
图3. PAM-agar-TABP40有机凝胶的光热行为。A)PAM-agar-TABP40有机凝胶在不同近红外强度(距离=10 cm,t=5 s)下的温度变化。B)PAM-agar-TABP40有机凝胶在有机凝胶和近红外光之间不同距离下的温度变化(I=10 A,t=5 s),C)以及t=1-10 s时的相应红外图像。E)不同PAM基有机凝胶(I=10 A,距离=10 cm)的温度变化。F)PAM-agar-TABP40有机凝胶在近红外辐射下的光热转换效应。G)利用线性时间数据计算冷却过程的时间常数(τs)。H)PAM-agar-TABP40有机凝胶的光热循环,用于多次开/关循环(I=10 A,距离=10 cm)。I)PAM-agar-TABP40有机凝胶在四个月后的光热稳定性。
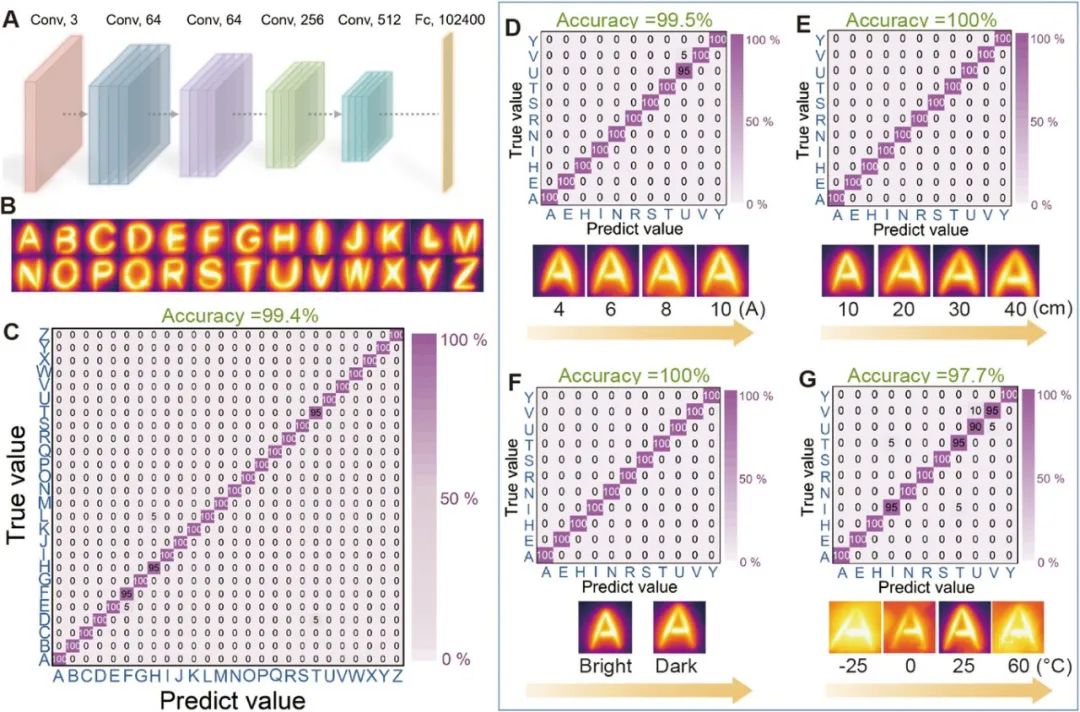
图4. 基于机器学习和近红外光的高精度模式识别数据处理。A)培训过程的说明。B)在近红外激光下,通过不同掩模在PAM-agar-TABP40有机凝胶上照射26个字母的光学照片。C)26个字母的混淆图,显示识别准确率为99.4%。“燕山大学”中11个字母的混淆图,D)不同的电流(识别准确率为99.5%),E)不同的距离(识别准确度为100%),F)不同的环境亮度(识别正确率为100%)。插图显示了相应“A”在不同条件下的光学照片。
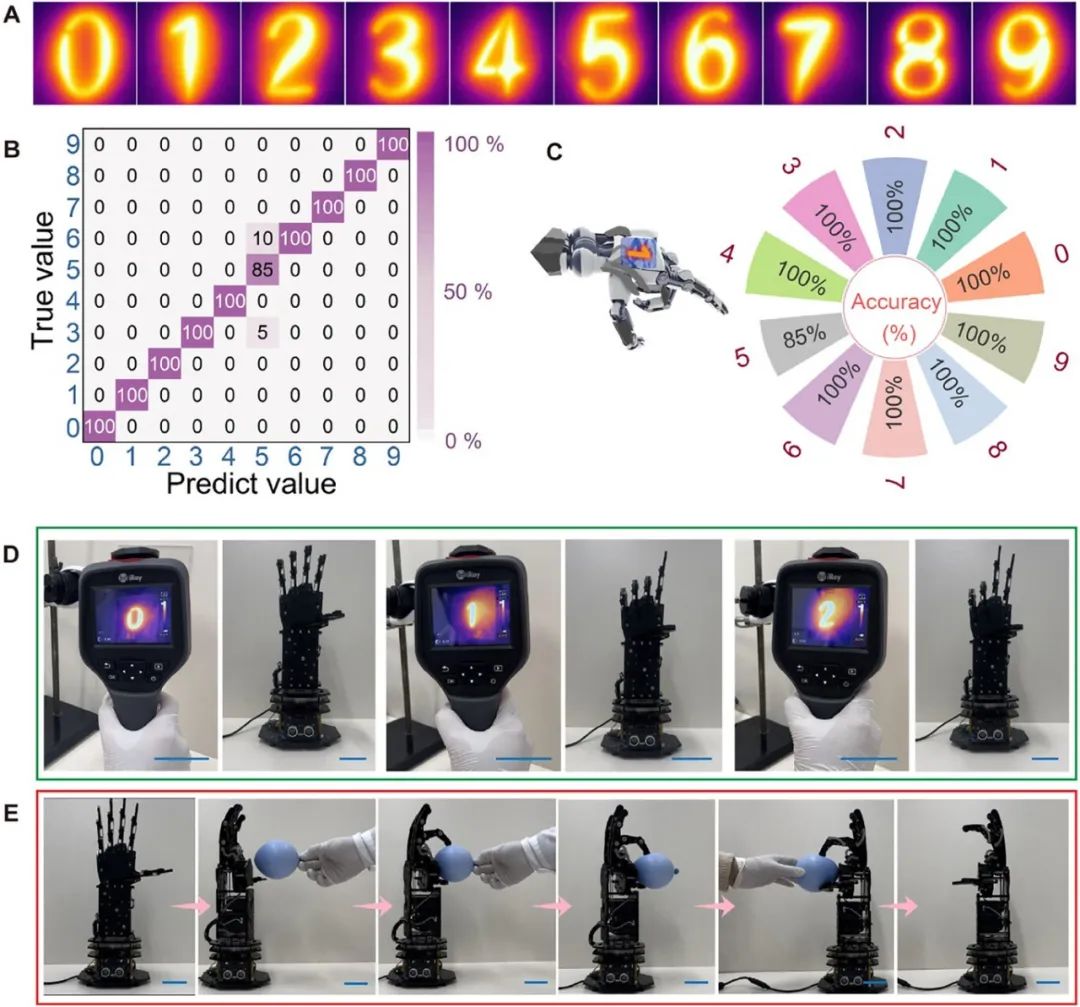
图5. 非接触式传感器的应用。A)在近红外激光下,通过不同掩模在PAM-agar-TABP40有机凝胶上照射10个数字的光学照片。B)26个字母的混淆图,显示识别准确率为98.5%。C)非接触式传感系统的数字识别精度总结。D)结合机器学习,基于近红外光的非接触式传感系统成功识别数字并做出相应的手势。E)非接触式传感系统可以抓取和转移物体
审核编辑 黄宇
-
机器人
+关注
关注
214文章
31611浏览量
224321 -
非接触式
+关注
关注
0文章
103浏览量
14770 -
红外光
+关注
关注
0文章
62浏览量
13443 -
传感系统
+关注
关注
1文章
107浏览量
17430
发布评论请先 登录
人形机器人关节扭矩传感器的详细应用场景及解决方案
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
非接触式磁场传感:磁性编码器信号生成与解码原理

非接触式磁编码传感技术及误差补偿原理

近红外光谱技术破局铁矿石成分在线检测

红外光谱技术应用与原理分析




评论