 进入多模态时代!测量采样频率升至1000Hz,三大机器人触觉传感器新品发布
进入多模态时代!测量采样频率升至1000Hz,三大机器人触觉传感器新品发布

电子发烧友网报道(文/莫婷婷)在机器人技术飞速发展的今天,触觉传感器作为机器人感知系统的核心组件,正扮演着越来越重要的角色。根据兴业证券的报告,人形机器人中传感器的价值量极高,单台机器人的传感器成本约为8.96万元,占总成本的22.4%。其中,触觉传感器是关键一环。
目前,全球排名前五的柔性触觉传感器TOP5的厂商包括Novasentis、Tekscan、japan DisplayInc.(JDl)、Baumer、Fraba,合计占有约超过50%的市场份额。在近年来,国内企业也在不断实现技术突破。电子发烧友网关注到弦动未来、帕西尼、福莱新材在触觉传感器领域都发布了新品。
从刚性到柔性,机器人精细操作升级
根据材料的柔性特性不同,可以将触觉传感器分为柔性和刚性两类。其中柔性触觉传感器也被认为是机器人的“电子皮肤”,刚性触觉传感器则是基于硬质材料,用在工业机器人和制造自动化环境中提供高精度、线性且稳定的力/压强测量。
机器人,特别是人形机器人对电子皮肤需求的增长,直接推动了柔性触觉传感器的巨大需求。
传统的刚性传感器难以贴合机器人复杂的曲面结构,尤其在灵巧手、关节等需要高度灵活性的部位,且延展性小于1%,杨氏模量约为1-200GPa,主要以工业机器人的应用居多。而电子皮肤要求传感器具备“真柔性”,能够无缝贴合指尖、指腹、手心、手背等三维曲面,实现全域覆盖,延展性可以达到1000%,杨氏模量达10kPa-200GPa。
柔性触觉传感器按照技术路线可以进一步分为压阻式、电容式、光电式与电磁式等,华经产业研究院的数据显示,在2023年,压阻式、电容式为主要的柔性触觉传感器。电阻式柔性触觉传感器具备结构简单、动态范围大、成本低的特点,但是容易受到温度干扰;电容式柔性触觉传感器灵敏度高、响应速度快、易于阵列化集成,但是容易受到周围导电物体的电容干扰。
不同技术路线的触觉传感器在机器人中均有所应用。例如优必选Walker S1指尖、宇树科技的G1指尖、掌心采用的是阵列触觉压力传感器,可搬运物体、操作工具等。开普勒的先行者K指尖采用的电容式阵列式传感器,单指尖配备96个传感单元,可搬运、抓取物体等。
随着人形机器人抓取等功能的丰富,也催生了对高灵敏度、可拉伸、耐弯折的柔性触觉传感器的迫切需求。传统触觉传感器通常只能测量单一方向的压力,这种局限性使得传统传感器在复杂场景中的应用受到限制。例如,在机器人进行复杂物体抓取或装配时,仅感知垂直压力无法准确判断物体的受力状态和运动趋势。
然而,随着企业的技术迭代,触觉传感器已经实现了多模态感知能力,能够同时检测X、Y、Z三个方向的力矢量,并具备温度、湿度等多种感知功能。这使得机器人能够更全面地理解物理世界,实现更加精细和智能的操作。
从产业链看,柔性触觉传感器主要由芯片、原材料、结构件、其他构成,其中芯片占了30%的比例,原材料、结构件分别占25%、15%。国内柔性触觉传感器企业包括汉威科技、奥迪微、帕西尼、立感科技等。电子发烧友网看到,近半年来不同产业链的企业均有新品发布,包括弦动未来、帕西尼、福莱新材等。
弦动未来:SynTac多模态触觉传感器
今年10月,弦动未来近日发布了其自研的SynTac多模态触觉传感器,实现了接近觉、视触觉与温度的深度融合,SynTac的核心优势在于其三大核心能力:未接触先预判、触即知抓得稳、辨温差更安全。
SynTac多模态触觉传感器接近觉感知分辨率为1 mm,接近觉感知量程0~1300mm,可以在机器人与物体未接触时,精准捕捉其方位、轮廓与分布范围,而不是只有在接触后才获取信号,可以让机器人提前规划运动轨迹、调整移动速度,提升操作效率与精准度。
官方介绍,SynTac多模态触觉传感器的触觉采样频率为30Hz、触觉感知面积达到24*24mm、触觉感知分辨率450*395,接近觉感知分辨率1 mm。高空间分辨的特性让其能够精准分辨物体材质本身的软硬特性。再配合接近觉的多感官协同,能够实现细小的零件、柔软的物体稳固抓取不打滑,轻柔握持不损伤,具备力度智能控制能力。
该产品的温度及接近觉采样频率为10Hz,温度感知量程为-40~125℃,温度感知分辨率为0.1℃,实现伸手拿东西前,会先通过触觉感知温度是否适宜,再决定是否抓取。通过快速分辨物体温度区间,精准筛选出适宜抓取的目标,可用于热食配送、恒温试剂抓取等场景。
SynTac通过温度感知负责安全筛选,接近觉负责轨迹优化,视触觉负责精细执行形成感知。
帕西尼PX-6AX-GEN3多维触觉传感器
帕西尼感知科技在8月发布了其第三代高精度多维触觉传感器PX-6AX-GEN3,这款产品无论从感知性能、耐受耐久能力、易用程度实现提升,并在架构、多维感知能力、非线性算法优化实现核心技术突破。
PX-6AX-GEN3基于全球首创的6D霍尔阵列式触觉传感技术积累,搭载第三代自研芯片与AMSS全模量测量系统,实现每秒数百万次高频信号采集。
在多维感知能力方面:PX-6AX-GEN3能够以1000Hz频率输出六维力(三维力+三维力矩)、力分布、材质识别、温度监测、回弹特性等15种触觉参数,支持0.01N级精细力分辨和全量程<0.5%FS的超高重复精度。
PX-6AX-GEN3具备0.01N的力识别能力、全量程<0.5%FS级重复精度,还具备工业级性能优势,内置封装的非线性力学反演算法,能够快速磁反解算法精准区分内源磁场与外部干扰,。此外,PX-6AX-GEN3还具备高度集成与即插即用的特点,传感器采用高度集成的智能触觉设计,内嵌了边缘计算单元。并且在易用性迎来创新,兼容主流通讯协议,可在20秒内快速上手应用。
在机器人的应用上,PX-6AX-GEN3提供指尖、指腹、掌心等12款不同尺寸型号可灵活适配多种机器人末端执行机构(如灵巧手、夹爪等),满足搬运、装配、操作工具等多样化任务需求。
目前,帕西尼已经实现了数据闭环构建,同步应用于自建Super EID Factory,为亿级OmniSharing DB数据集提供高精度物理感知基础,支撑大模型训练与泛化决策。
福莱新材第二代柔性触觉传感器
福莱新材在今年6月发布了其第二代柔性触觉传感器,这款产品具备“真柔性、全曲面、三维力”的特性。据了解,福莱新材自2017年开始布局柔性传感器研发,已建成首条中试产线并实现产品批量供货。
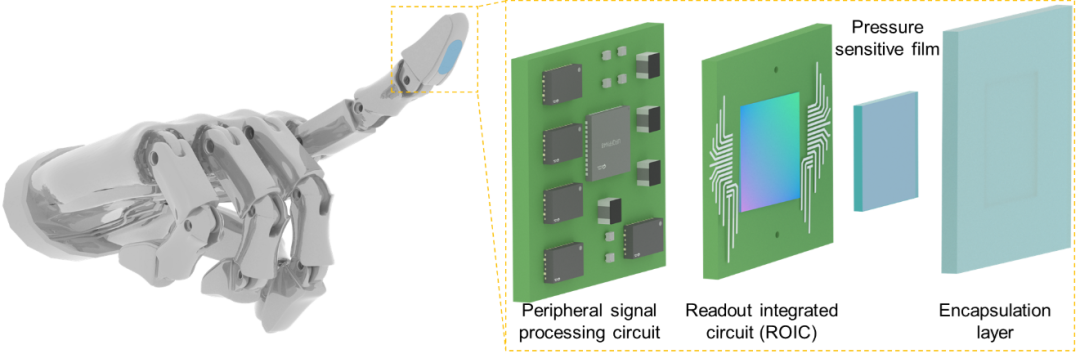
福莱新材第二代产品通过分子级优化复合传感材料、仿生表面硅胶结构等创新技术,采用了创新的柔性薄膜制备工艺,可完美贴合柱面、球面等复杂三维曲面,突破传统半柔性或平面传感器的物理限制,支持在机器人灵巧手的指尖、指腹、手心、手背等关键部位完整部署,实现全域触觉感知。确保实际应用中的可靠性和精确性。
在作用力方面,第二代柔性触觉传感器超越单一垂直力检测局限,能够同时检测X、Y、Z三个方向的力矢量,解决了传统触觉传感器只能测量单一方向的压力,无法感知物体在水平方向上的力提供力的强度与方向信息的问题,为复杂交互场景下的精细操作提供数据基础。
配合深度学习触觉识别与多模态数据融合技术,该产品实现高维特征实时提取及异构信号整合,提高感知精度和决策效率。
就在7月兆威机电新一代灵巧手发布会上,兆威机电宣布ZWHAND灵巧手搭载了福莱新材第二代柔性触觉传感器,实现多模态触觉感知,采样频率≥100Hz、感知灵敏度达行业领先的<0.1N级别,使用寿命≥100万次。
小结:
机器人触觉传感器正经历一场升级革命,从单一、刚性的压力测量,迈向多模态、柔性的类人感知。兆威机电集团副总经理陈毅东灵巧手触觉系统有着四大关键技术指标:多模态触觉感知能力、超高感知灵敏度、高采样频率响应、超长使用寿命。
以弦动未来、帕西尼、福莱新材为代表的企业,通过技术创新,提升了机器人的环境理解与精细操作能力,推动了人形机器人向更智能、更安全、更人性化的方向发展。
目前,全球排名前五的柔性触觉传感器TOP5的厂商包括Novasentis、Tekscan、japan DisplayInc.(JDl)、Baumer、Fraba,合计占有约超过50%的市场份额。在近年来,国内企业也在不断实现技术突破。电子发烧友网关注到弦动未来、帕西尼、福莱新材在触觉传感器领域都发布了新品。
从刚性到柔性,机器人精细操作升级
根据材料的柔性特性不同,可以将触觉传感器分为柔性和刚性两类。其中柔性触觉传感器也被认为是机器人的“电子皮肤”,刚性触觉传感器则是基于硬质材料,用在工业机器人和制造自动化环境中提供高精度、线性且稳定的力/压强测量。
机器人,特别是人形机器人对电子皮肤需求的增长,直接推动了柔性触觉传感器的巨大需求。
传统的刚性传感器难以贴合机器人复杂的曲面结构,尤其在灵巧手、关节等需要高度灵活性的部位,且延展性小于1%,杨氏模量约为1-200GPa,主要以工业机器人的应用居多。而电子皮肤要求传感器具备“真柔性”,能够无缝贴合指尖、指腹、手心、手背等三维曲面,实现全域覆盖,延展性可以达到1000%,杨氏模量达10kPa-200GPa。
柔性触觉传感器按照技术路线可以进一步分为压阻式、电容式、光电式与电磁式等,华经产业研究院的数据显示,在2023年,压阻式、电容式为主要的柔性触觉传感器。电阻式柔性触觉传感器具备结构简单、动态范围大、成本低的特点,但是容易受到温度干扰;电容式柔性触觉传感器灵敏度高、响应速度快、易于阵列化集成,但是容易受到周围导电物体的电容干扰。
不同技术路线的触觉传感器在机器人中均有所应用。例如优必选Walker S1指尖、宇树科技的G1指尖、掌心采用的是阵列触觉压力传感器,可搬运物体、操作工具等。开普勒的先行者K指尖采用的电容式阵列式传感器,单指尖配备96个传感单元,可搬运、抓取物体等。
随着人形机器人抓取等功能的丰富,也催生了对高灵敏度、可拉伸、耐弯折的柔性触觉传感器的迫切需求。传统触觉传感器通常只能测量单一方向的压力,这种局限性使得传统传感器在复杂场景中的应用受到限制。例如,在机器人进行复杂物体抓取或装配时,仅感知垂直压力无法准确判断物体的受力状态和运动趋势。
然而,随着企业的技术迭代,触觉传感器已经实现了多模态感知能力,能够同时检测X、Y、Z三个方向的力矢量,并具备温度、湿度等多种感知功能。这使得机器人能够更全面地理解物理世界,实现更加精细和智能的操作。
从产业链看,柔性触觉传感器主要由芯片、原材料、结构件、其他构成,其中芯片占了30%的比例,原材料、结构件分别占25%、15%。国内柔性触觉传感器企业包括汉威科技、奥迪微、帕西尼、立感科技等。电子发烧友网看到,近半年来不同产业链的企业均有新品发布,包括弦动未来、帕西尼、福莱新材等。
弦动未来:SynTac多模态触觉传感器
今年10月,弦动未来近日发布了其自研的SynTac多模态触觉传感器,实现了接近觉、视触觉与温度的深度融合,SynTac的核心优势在于其三大核心能力:未接触先预判、触即知抓得稳、辨温差更安全。
SynTac多模态触觉传感器接近觉感知分辨率为1 mm,接近觉感知量程0~1300mm,可以在机器人与物体未接触时,精准捕捉其方位、轮廓与分布范围,而不是只有在接触后才获取信号,可以让机器人提前规划运动轨迹、调整移动速度,提升操作效率与精准度。
官方介绍,SynTac多模态触觉传感器的触觉采样频率为30Hz、触觉感知面积达到24*24mm、触觉感知分辨率450*395,接近觉感知分辨率1 mm。高空间分辨的特性让其能够精准分辨物体材质本身的软硬特性。再配合接近觉的多感官协同,能够实现细小的零件、柔软的物体稳固抓取不打滑,轻柔握持不损伤,具备力度智能控制能力。
该产品的温度及接近觉采样频率为10Hz,温度感知量程为-40~125℃,温度感知分辨率为0.1℃,实现伸手拿东西前,会先通过触觉感知温度是否适宜,再决定是否抓取。通过快速分辨物体温度区间,精准筛选出适宜抓取的目标,可用于热食配送、恒温试剂抓取等场景。
SynTac通过温度感知负责安全筛选,接近觉负责轨迹优化,视触觉负责精细执行形成感知。
帕西尼PX-6AX-GEN3多维触觉传感器
帕西尼感知科技在8月发布了其第三代高精度多维触觉传感器PX-6AX-GEN3,这款产品无论从感知性能、耐受耐久能力、易用程度实现提升,并在架构、多维感知能力、非线性算法优化实现核心技术突破。
PX-6AX-GEN3基于全球首创的6D霍尔阵列式触觉传感技术积累,搭载第三代自研芯片与AMSS全模量测量系统,实现每秒数百万次高频信号采集。
在多维感知能力方面:PX-6AX-GEN3能够以1000Hz频率输出六维力(三维力+三维力矩)、力分布、材质识别、温度监测、回弹特性等15种触觉参数,支持0.01N级精细力分辨和全量程<0.5%FS的超高重复精度。
PX-6AX-GEN3具备0.01N的力识别能力、全量程<0.5%FS级重复精度,还具备工业级性能优势,内置封装的非线性力学反演算法,能够快速磁反解算法精准区分内源磁场与外部干扰,。此外,PX-6AX-GEN3还具备高度集成与即插即用的特点,传感器采用高度集成的智能触觉设计,内嵌了边缘计算单元。并且在易用性迎来创新,兼容主流通讯协议,可在20秒内快速上手应用。
在机器人的应用上,PX-6AX-GEN3提供指尖、指腹、掌心等12款不同尺寸型号可灵活适配多种机器人末端执行机构(如灵巧手、夹爪等),满足搬运、装配、操作工具等多样化任务需求。
目前,帕西尼已经实现了数据闭环构建,同步应用于自建Super EID Factory,为亿级OmniSharing DB数据集提供高精度物理感知基础,支撑大模型训练与泛化决策。
福莱新材第二代柔性触觉传感器
福莱新材在今年6月发布了其第二代柔性触觉传感器,这款产品具备“真柔性、全曲面、三维力”的特性。据了解,福莱新材自2017年开始布局柔性传感器研发,已建成首条中试产线并实现产品批量供货。
福莱新材第二代产品通过分子级优化复合传感材料、仿生表面硅胶结构等创新技术,采用了创新的柔性薄膜制备工艺,可完美贴合柱面、球面等复杂三维曲面,突破传统半柔性或平面传感器的物理限制,支持在机器人灵巧手的指尖、指腹、手心、手背等关键部位完整部署,实现全域触觉感知。确保实际应用中的可靠性和精确性。
在作用力方面,第二代柔性触觉传感器超越单一垂直力检测局限,能够同时检测X、Y、Z三个方向的力矢量,解决了传统触觉传感器只能测量单一方向的压力,无法感知物体在水平方向上的力提供力的强度与方向信息的问题,为复杂交互场景下的精细操作提供数据基础。
配合深度学习触觉识别与多模态数据融合技术,该产品实现高维特征实时提取及异构信号整合,提高感知精度和决策效率。
就在7月兆威机电新一代灵巧手发布会上,兆威机电宣布ZWHAND灵巧手搭载了福莱新材第二代柔性触觉传感器,实现多模态触觉感知,采样频率≥100Hz、感知灵敏度达行业领先的<0.1N级别,使用寿命≥100万次。
小结:
机器人触觉传感器正经历一场升级革命,从单一、刚性的压力测量,迈向多模态、柔性的类人感知。兆威机电集团副总经理陈毅东灵巧手触觉系统有着四大关键技术指标:多模态触觉感知能力、超高感知灵敏度、高采样频率响应、超长使用寿命。
以弦动未来、帕西尼、福莱新材为代表的企业,通过技术创新,提升了机器人的环境理解与精细操作能力,推动了人形机器人向更智能、更安全、更人性化的方向发展。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31455浏览量
223688 -
触觉传感器
+关注
关注
4文章
128浏览量
10440 -
具身智能
+关注
关注
0文章
473浏览量
909
发布评论请先 登录
相关推荐
热点推荐
“触达未来 链动产业” 大深传感AI柔性仿生触觉传感器新品发布会在惠阳成功举办
技术,发布了具有完全自主知识产权的柔性触觉传感器新品,并展示了惠阳区在人工智能与机器人产业生态建设上的最新成果。 深圳市大族云成科技有限公司

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
“盲动”变成“感知运动”
普通机器人靠编码器控制位置,只能“按死命令走”。而关节扭矩传感器实时测量每个关节受到的扭转力,精度可达0.01牛米,采样
发表于 04-17 17:27
电子科技大学:研究用于机器人仿生皮肤的三维可拉伸触觉传感器
可拉伸触觉传感器对于机器人仿生皮肤实现环境交互和多模态感知至关重要 。然而,传统的二维传感器受限

ADPD4000/ADPD4001:多模态传感器前端的卓越之选
ADPD4000/ADPD4001:多模态传感器前端的卓越之选 在当今电子设备日益智能化、多功能化的时代,多
全球首个最大规模跨本体视触觉多模态数据集白虎-VTouch发布
具身智能走向真实世界规模化应用,离不开可复现、可扩展、可协同演进的数据基础设施。围绕真实物理交互能力构建这一核心工程目标,1月26日,国家地方共建人形机器人创新中心联合上海纬钛科技有限公司正式发布
西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能
人类指尖分布着高密度的触觉感受器使得人类能够精确感知物体的纹理、大小和形状等触觉信息。近年来,人工电子皮肤(触觉传感器阵列)在机器人领域得到
2026电子皮肤赋能具身智能机器人专题论坛即将召开,共同探索触觉感知新未来
仿生触觉,开启机器人感知新时代 电子皮肤,是一种柔性的、可拉伸的集成传感器网络,能够模拟人类皮肤的压力、温度、湿度等感知功能。近年来,随着柔性电子、纳米材料与人工智能算法的进步,电
武汉光谷企业华威科发布最小机器人指尖传感器
12月18日,科技企业华威科在第六届中国机器人行业年会现场,正式推出全新品牌"具感时代EmbosenX",并同步发布两款突破性触觉

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
、远程作业机器人、特种检测机器人· 多摄像头输入:通过多路摄像头无死角监控作业现场,实现精准操作与安全监控。· 多屏显示:将不同视角的画面、传感器
发表于 10-29 16:41
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)
环境的视觉、触觉、力觉,到维持自身平衡与定位的惯性测量等,各类传感器的性能与技术进步直接决定了人形机器人的智能化水平与应用场景拓展能力。当前,人形机

机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性
。 机器人领域中的温度传感器技术主要包括 接触式和非接触式 两种。接触式温度传感器是通过机器人接触物体表面进行测量,常见的有热电偶

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
机器人获得更接近人类的触觉反馈。
赛事首席技术官王博士表示:“当机器人开始‘感知’而非‘计算’环境时,真正的智能化竞技时代才算到来。” 未来,磁传
发表于 08-26 10:02
0.01°微小变化精准捕捉,机器人姿态传感器革新
电子发烧友网报道(文/莫婷婷)在人形机器人中,传感器是实现感知能力的关键技术,高性能惯性测量单元(IMU)等姿态检测传感器在其中发挥着重要作用。中金研究预计,2030年

触觉传感器已在亚马逊仓储机械臂率先商用 新增形式有望加速市场增长节奏
落地的核心支撑。除人形机器人之外,惊喜地发现触觉传感能力已在仓储机械臂中率先落地应用,这或加速触觉传感器行业的发展。




评论