 深度解析:IMU陀螺仪芯片从6轴到9轴陀螺仪传感器融合的技术革新
深度解析:IMU陀螺仪芯片从6轴到9轴陀螺仪传感器融合的技术革新

在便携式系统的快速发展中,精准确定设备的位置和移动状态已成为一项标准功能。手机、平板电脑等系统通过加速度计和磁力计提供的6轴数据,成功激活了一系列关键功能,显著提升了消费类电子设备的界面友好性。
然而,随着技术的不断进步,下一代设备正迈向采用陀螺仪功能的9轴传感器融合时代,以期为用户带来更为卓越的体验。以健康监视器为例,当设备能够精确区分步行、游泳和跑步等多种活动时,它便能更精准地追踪用户的生活状态。此外,陀螺仪数据还催生了诸如手势识别等新型界面功能,用户只需轻轻挥动手腕,便能轻松展示所需信息。
这一技术革新不仅丰富了设备的功能,更在提升用户体验方面发挥了重要作用。随着9轴传感器融合技术的深入应用,我们有理由相信,未来的便携式系统将为用户带来更为便捷、智能和个性化的服务。
众多消费类电子设备,如手机、游戏系统、健康监视器和可穿戴设备等,均可从9轴传感器融合技术中获益匪浅。这一技术为设备赋予了高附加值功能,如三维手势识别、相对定位以及精准的运动跟踪,从而极大地提升了用户体验。
然而,值得注意的是,这些设备并不要求战斗机保持飞行那样的极高精确度。相反,它们需要的是一种既经济又高效的9轴传感器融合实施方案,以满足消费者应用程序的需求,进一步优化用户体验。
如今,随着新型传感器的出现,如 PNISENtral M&M运动定向跟踪模块13759,, 开发人员使用LSM330+RM3100(磁传感器) 实现9轴输出的等效效果(加速度计+磁力计+陀螺仪),同时能耗降低了高达90%。这种技术的核心在于传感器融合,它利用多个传感器之间的互补性,填补单一传感器的盲点,从而提供更全面、准确的数据。
9轴传感器融合技术通过将加速度计、磁力计和陀螺仪的数据融合,使系统能够精,确地定位自身在三维空间中的位置、倾斜和方向,以及监测位置和旋转的变化。这种技术的有效应用,不仅提高了设备的性能,更为消费类电子设备带来了无限的创新可能。
加速度计:感知运动与方向的关键
加速度计是一种能够测量三个轴上加速度的传感器。值得注意的是,静止的物体同样会受到重力的影响,因此会产生向下的加速度,这使得加速度计能够判断系统相对于“向下”的方向。这一特性不仅帮助系统确定其水平状态,还广泛应用于手持和便携式设备中,用于调整显示方向,以匹配用户的握持方式。无论是手机、平板还是笔记本电脑,这一功能都极大地提升了用户的使用体验。
加速度计的另一大优势在于其能够检测设备的掉落状态。例如,当笔记本电脑放置在桌面上时,它会检测到正常的重力加速度。但一旦笔记本电脑从桌面跌落,加速度计便能迅速捕捉到加速度的变化,从而判断设备是否处于危险状态。这一功能在防止硬盘驱动器损坏和数据丢失方面发挥着至关重要的作用。
此外,加速度计在节能方面也有着不俗的表现。对于长时间未动的健身追踪器等设备,加速度计能够检测到这种静态状态,进而触发设备的自动关机功能,从而显著延长电池寿命。
磁力计:定位磁北的得力助手
磁力计是一种能够测量磁场强度和方向的传感器。它常被应用于电子指南针中,通过分析检测到的磁场信息来确定磁北的方向。然而,磁力计作为独立传感器使用时,往往难以准确识别磁北。这是因为磁力计需要精确的校准和稳定的环境来确保测量结果的准确性。
在手持设备中,磁力计通常与加速度计配合使用,以提高定位精度。加速度计能够检测设备的倾斜角度,从而为磁力计提供必要的补充信息,使其能够更准确地确定磁北方向。
陀螺仪:弥补加速度计的盲点
虽然加速度计能够感知到设备的静态状态,但当设备以加速度计为旋转中心进行旋转时,加速度计却无法检测到这种运动。这正是加速度计的盲点所在。而陀螺仪则能够弥补这一不足,它能够检测到设备的旋转运动,为系统提供更为全面的运动信息。
然而,陀螺仪的引入也带来了一系列挑战。在三种类型的传感器中,陀螺仪往往是体积最大、成本最高的。尽管它提供了宝贵的数据,但其高昂的价格、较大的体积以及较高的功耗往往使得开发者在权衡利弊时犹豫不决。因此,在许多应用中,开发者不得不将位置和方向功能限制在由加速度计和磁力计提供的6轴数据范围内。
综上所述,加速度计、磁力计和陀螺仪各自具有独特的功能和优势,它们共同构成了现代消费类电子设备的核心感知系统。随着技术的不断进步和成本的降低,我们有理由相信,未来的设备将能够更加精准地感知运动和方向,为用户带来更为丰富和便捷的体验。
如今,软件算法和低噪声,低延迟传感器的进步使得仅使用加速度计和磁力计的数据来模拟陀螺仪输出成为可能。这是中使用的方法,其中系统根据对设备先前位置的了解来计算设备的旋转方向和速度。换句话说,当系统可以随时间跟踪方向时,它可以推断旋转数据。
应用:无人机、直升机和飞机
IMU传感器的另一个应用是跟踪无人机、直升机和飞机的方向和航向。
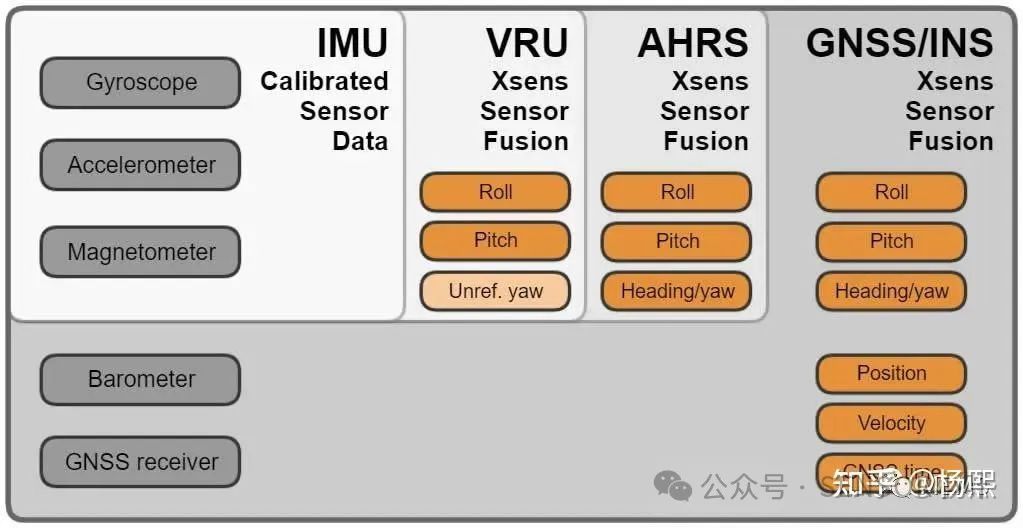
通常,这些解决方案使用IMU传感器和电子罗盘(即磁力计)的组合。这种组合有AHRS传感器的技术名称。(姿态和航向参考系统)。
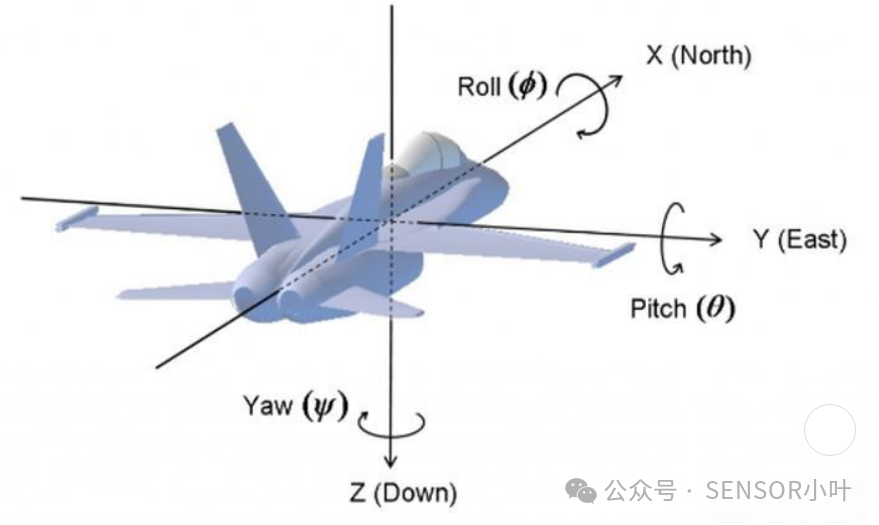
基本上加速度计的角度告诉我们无人驾驶飞机在地面,陀螺仪使用此数据作为参考和计算,偏航和滚动不断无人机飞行约和磁强计告诉我们的方向无人机是领导对我们地球的磁场,这样我们就能在地图上找到它!
IMU和MARG传感器有什么区别?MARG代表磁力计、角速度和重力,基本上是指IMU和指南针(磁力计)的组合。如本应用中所讨论的,这些主要用于飞机。
应用:虚拟现实头盔
虚拟现实是一项即将问世的技术,它将给游戏行业带来革命性的变化。如果你之前没有尝试过使用VR头盔,我建议你尝试一下,这是进入数字世界的一种有趣的方式,就像《黑客帝国》!
如果你有一个很好的预算,你可以得到一个眼睛裂谷VR耳机(链接到亚马逊),或者如果你是一个紧你可以尝试一个廉价的替代品如Xiomi耳机或谷歌纸板(链接到亚马逊),对智能手机的虚拟现实体验!
虚拟现实头盔主要使用这些IMU传感器来跟踪你的头部位置,以改变它发出的视频信号。例如,当你向上看时,你实际上是在绕x轴旋转你的头,这将被放置在你VR头盔里的IMU传感器的陀螺仪所感知,反过来,这将给你天空的视频feed。当你往下看的时候,你将你的头转向相反的方向,你就可以看到地面了!
SENtral M&M9轴/10轴运动测量模块
SENtralM&M运动和测量模块是一个蜂窝式印刷电路组件,可方便地将完整的运动传感器融合系统快速集成到可穿戴或移动设备中。一个模块包含SENtal运动协处理器、磁力计、加速计、陀螺仪和可选气压传感器,其中不同的SENtral M&M版本集成了不同的传感器模型。SENtral运动协处理器管理和使用来自传感器的数据,以提供可靠的运动跟踪和精确的方位,同时消耗相当于基于ARM的传感器融合微处理器的1%的功率。SENtral输出欧拉角(也就是航向、俯仰和滚转)、四元数和传感器数据。四元数唯一地定义了方向, 并且与欧拉角不同,当指向正上方时不经历奇点即万向锁。它们可以很容易地转换为欧拉角、旋转向量和旋转矩阵仅称DCM 。

特点:
vSENtral M&M运动定向跟踪模块,包括SENtral运动协处理器、三轴陀螺仪、三轴加速度计、三轴磁力计和气压传感器。
v低功耗:从效率较低的主机CPU中卸载传感器处理消耗的功率小于运行可比传感器融合算法的通用微处理器的1 %。提供调整功耗和运动跟踪性能之间权的能力。
v11x11毫米的占地面积和SMT设计,便于集成到用户的系统中。
vI2C接口: 在低功率实现中使用行业标准的I2C协议来连接传感器和主机因此系统集成是简单的。主机总线支持标准、快速快速加号和高速。
v输出:SENtral本地输出欧拉角6 向、俯仰和滚动、四元数、旋转速度、线性加速度和磁场。通过允许与I2C传感器总线上的设备进行直接通信。
v具有不同传感器的多种版本。
订货部件型号 | 涵盖器件 | 颜色 | 尺寸 |
13734 | 仅SENtral | M&M白色 | 8.64×8.64×0.81mm |
13763 | MPU6500(加速度/陀螺)+AK8963(磁传感器) | M&M红色 | 11×11×1.43mm |
13736 | LSM330(加速度/陀螺)+AK8963 | M&M绿色 | 11×11×1.43mm |
13738 | LSM9DS0(加速度/陀螺/磁传感器) | M&M黄色 | 11×11×1.43mm |
13759 | LSM330+RM3100(磁传感器) | M&M蓝色 | 22×11×6.75mm |
13771 | BMI055(加速度/陀螺)+AK8963 | M&M橙色 | 11×11×1.43mm |
13807 | BMI160(加速度/陀螺)+BMM150(磁传感器)+BMP280(气压) | M&M紫色 | 11×11×1.43mm |
13813 | LSM6DS3(加速度/陀螺)+AK9911(磁传感器)+LPS25H(气压) | M&M粉红 | 11×11×1.43mm |
-
传感器
+关注
关注
2574文章
54412浏览量
786249 -
陀螺仪
+关注
关注
44文章
873浏览量
101090 -
IMU
+关注
关注
6文章
403浏览量
47604
发布评论请先 登录
光纤陀螺仪与惯性导航系统在无人车驾驶中的应用

什么是光纤陀螺仪?陀螺仪有哪些作用?
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

**无人机飞控如何靠三轴MEMS陀螺仪实现稳定飞行?**
MEMS陀螺仪正在取代光纤陀螺仪?
求助,关于ST的IMU和地磁计用motionfx库融合后航向角异常的问题求解
MEMS陀螺仪的寻北原理是什么?精度如何?

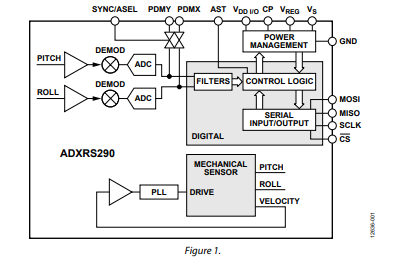
ADXRS290用于稳定应用的超低噪声、双轴MEMS陀螺仪技术手册
求助,关于传感器融合库的使用问题求解
ST的IMU和地磁计用motionfx库融合后航向角异常的原因?
爱普生XV7021BB陀螺仪传感器在人机交互中的应用

三轴MEMS陀螺仪:创新科技,精准感知
十轴姿态传感器模块 | 集成加速度计、陀螺仪、磁力计,自带BLE5.0蓝牙






 工商网监
工商网监
评论