 EtherNet IP转Profinet网关连接FANUC机器人配置指南(PROFIENT组态篇)
EtherNet IP转Profinet网关连接FANUC机器人配置指南(PROFIENT组态篇)

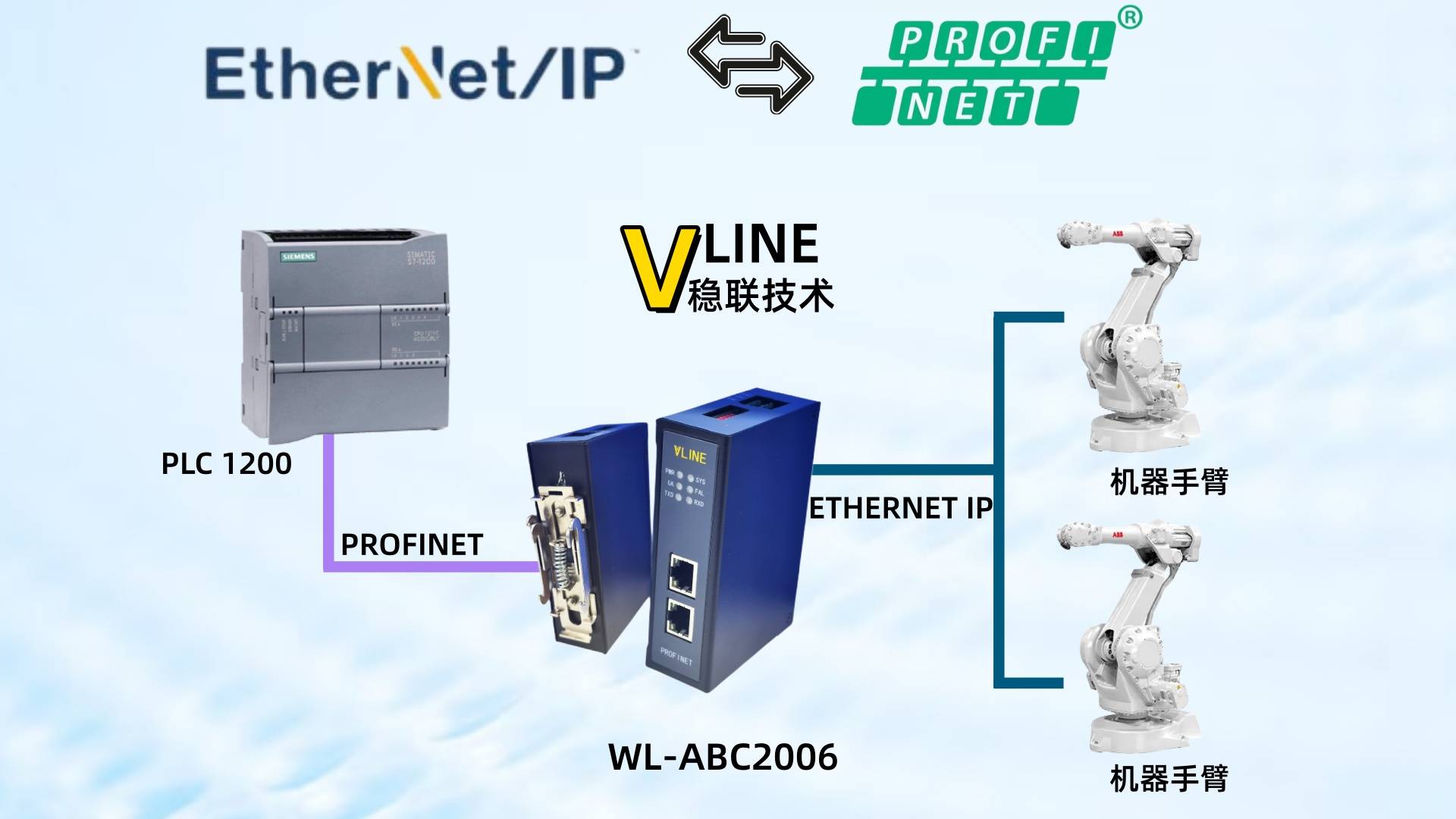
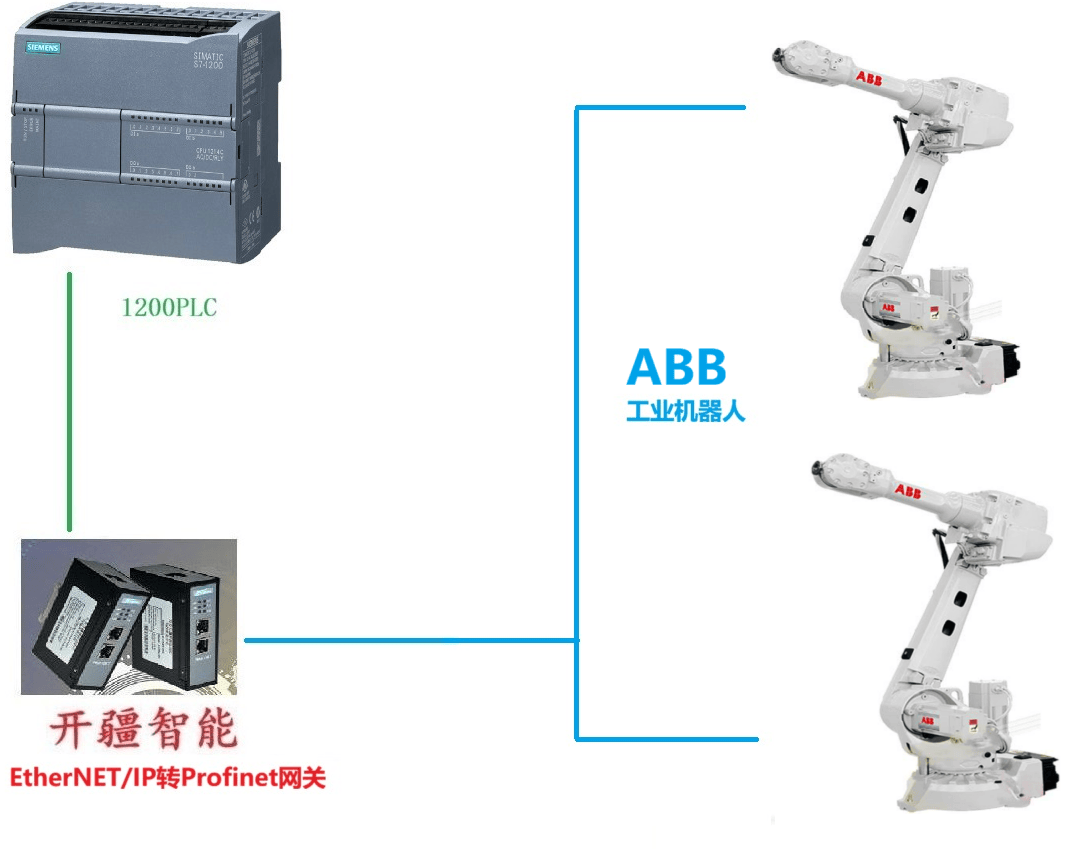
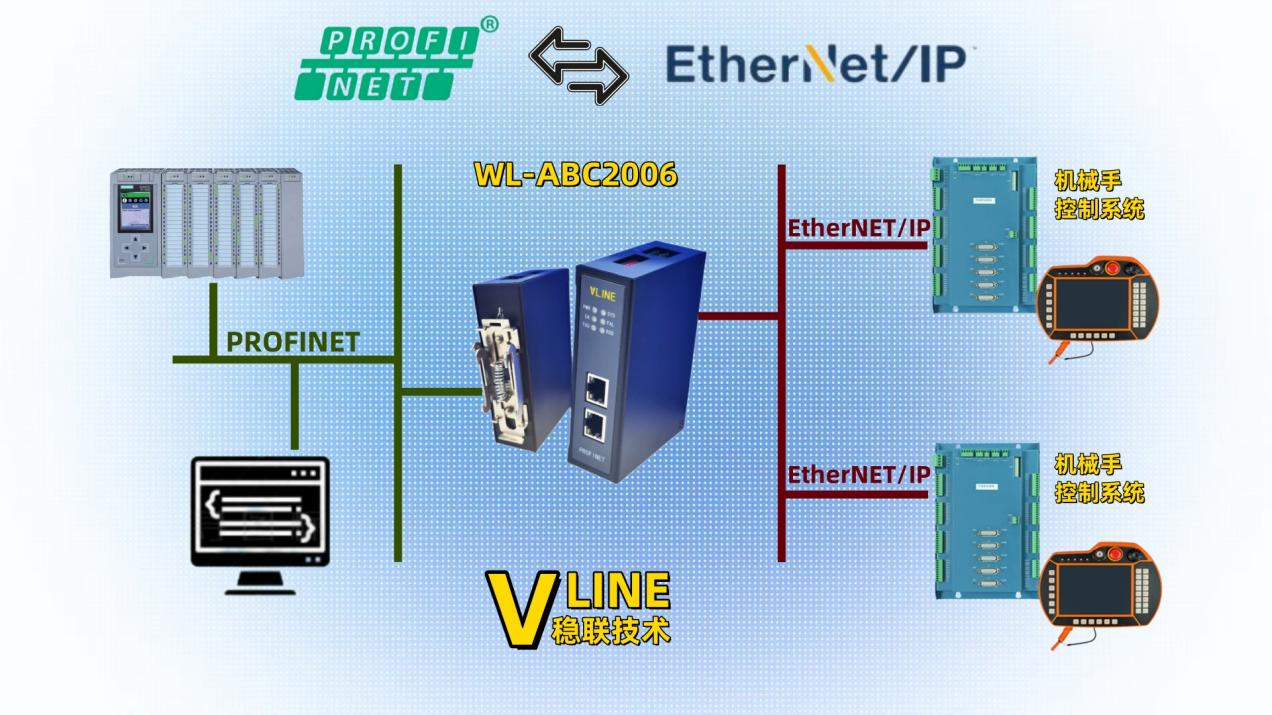
今天为大家分享稳联技术profient转ethernet ip(WL-ABC2006)网关与机器手臂西门子组态的分配过程。大致流程咱们一起看一下。

网关设备描述
启动 TIAPortal 开发环境,进入 “选项>管理通用站描述文件(GSD)”;选择 “安装”,加载网关厂商提供的GSD文件(*.xml格式)。
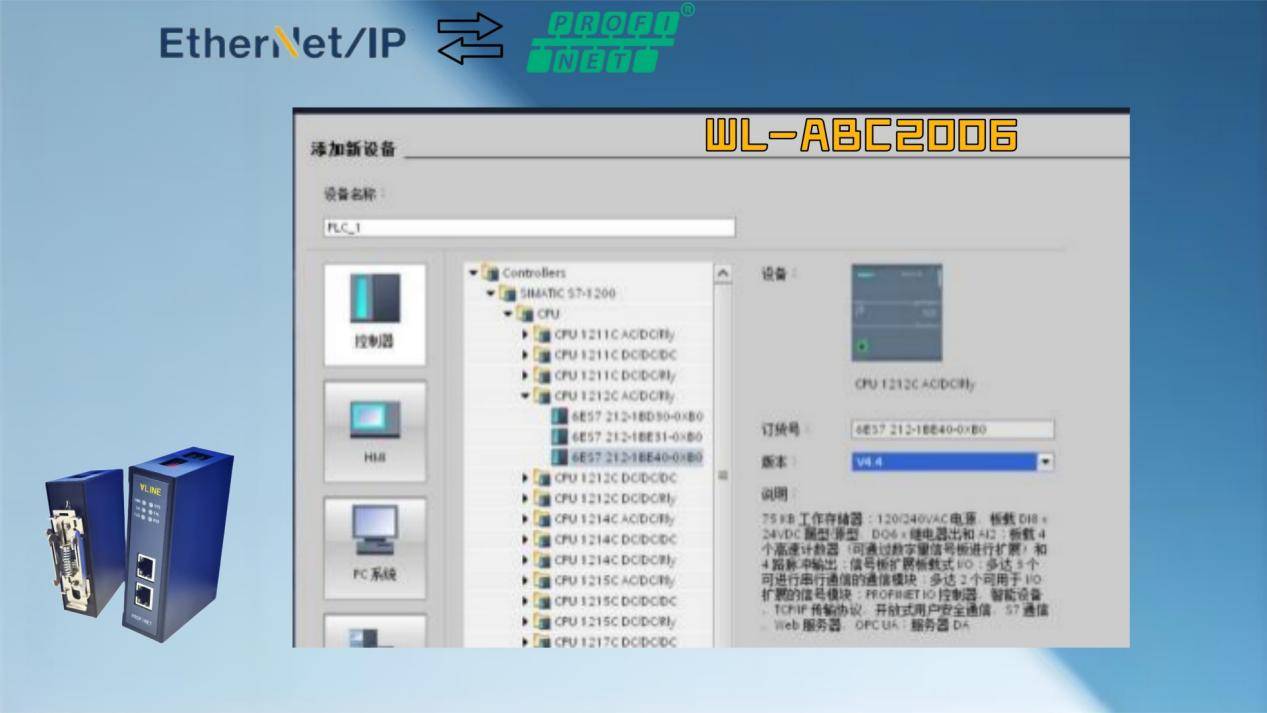
部署网关至Profinet网络
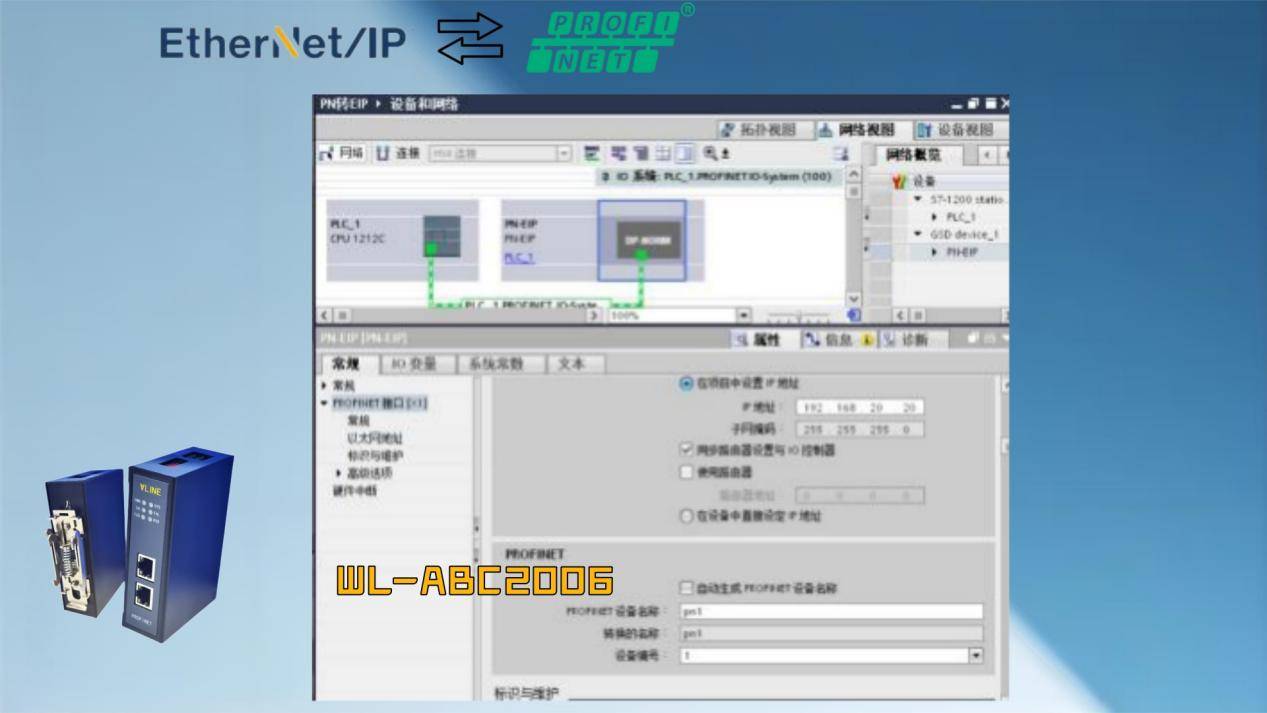
在 硬件目录 中定位已安装的网关模块,拖放至Profinet网络视图;右键点击网关设备,选择 “分配逻辑名称”,定义唯一标识符;配置稳联技术profient转ethernet ip(WL-ABC2006)网关网关Profinet接口 IP寻址(如192.168.1.100,需与PLC子网匹配)。
规划输入/输出数据区域
击启网关模块进入 “属性>常规>输入/输出”;根据机器人通信需求,设定 输入缓冲区大小(如128字节,用于状态采集)和 输出缓冲区大小(如128字节,用于指令下发);记录系统自动分配的 I/O地址映射(如输入区IW2000-IW2127,输出区QW2000-QW2127)。

配置Profinet侧参数
切换至 “Profinet参数” 选项卡:设备标识:输入与PLC组态一致的名称;IP寻址:设置与PLC网络兼容的地址(192.168.1.100);子网掩码:采用标准配置255.255.255.0。
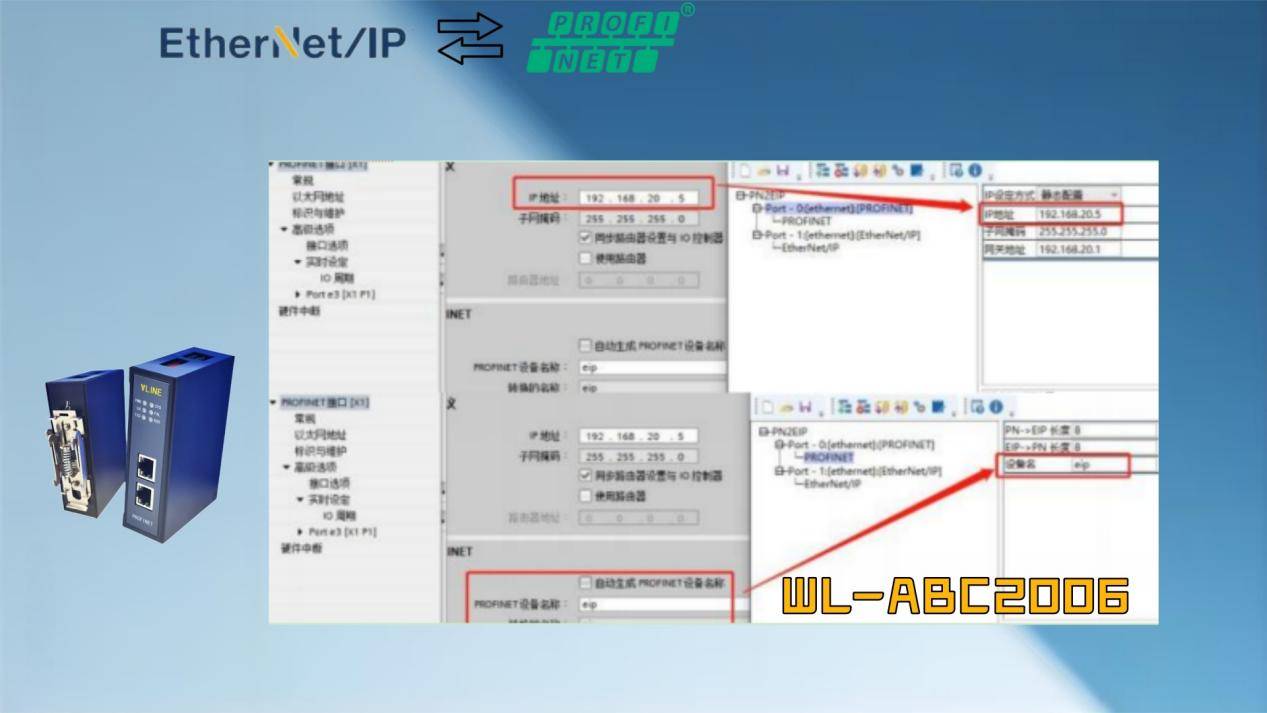
配置EtherNet/IP侧参数(机器人端)
进入 “EtherNet/IP参数” 配置界面:目标IP地址:填入机器人控制器IP(如192.168.0.20);子网掩码:与机器人网络保持一致(如255.255.255.0);数据缓冲区:设置与PLC侧匹配的输入/输出字节数(如各128字节)
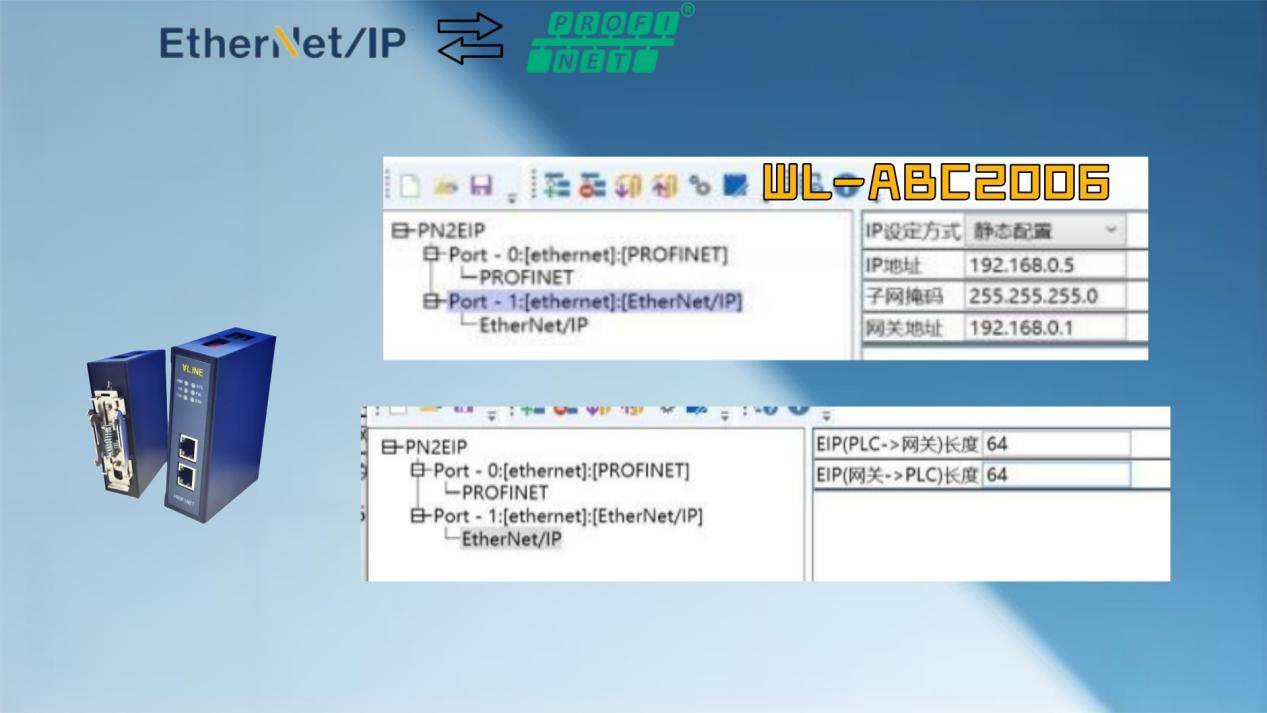
建立数据映射关系
导航至 “数据映射配置” 界面:将 PLC输出区(QW2000-QW2127) 映射至 EtherNet/IP输入寄存器(对应机器人的输入缓冲区);将 EtherNet/IP输出寄存器(对应机器人的输出缓冲区)映射至 PLC输入区(IW2000-IW2127);支持按字/字节精度配置,确保地址严格对应(如PLC的QW2000映射至机器人的D100)。稳联技术profient转ethernet ip(WL-ABC2006)网关
PLC变量监控:
在TIAPortal中创建监视表,写入测试值(如QW2000=1),验证机器人是否响应对应动作;读取IW2000数据,确认机器人状态反馈(如坐标信息、运行模式)是否准确。
审核编辑 黄宇
-
机器人
+关注
关注
213文章
31455浏览量
223689 -
Profinet
+关注
关注
9文章
2339浏览量
28352 -
Ethernet
+关注
关注
3文章
690浏览量
58234
发布评论请先 登录

极速组态!Profinet转Ethernet网关让ABB机器人主站秒连工业网络(下集)
开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
开疆智能Profinet转EtherNET/IP网关连接机器人配置案例
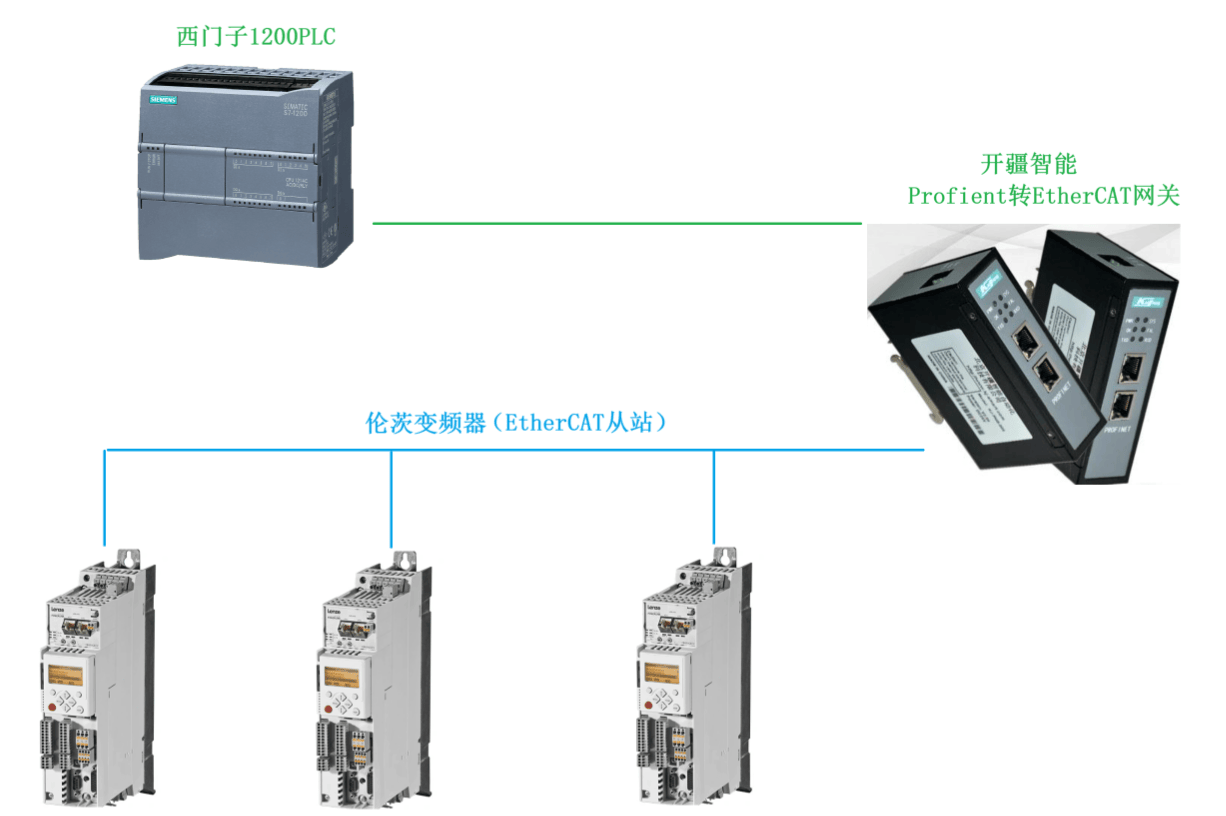
开疆智能Profient转EtherCAT网关连接伦茨变频器配置案例
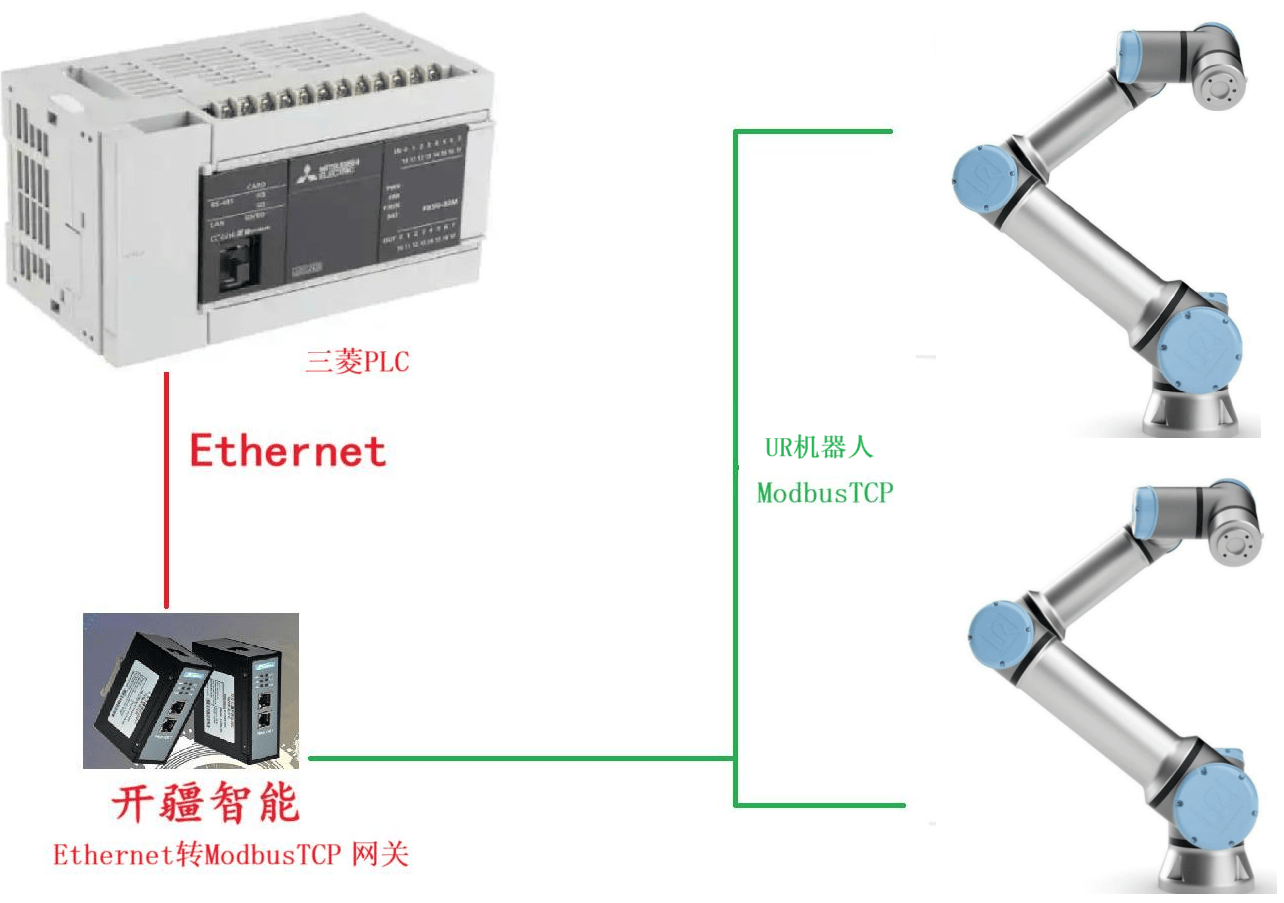
开疆智能Ethernet转ModbusTCP网关连接UR机器人配置案例
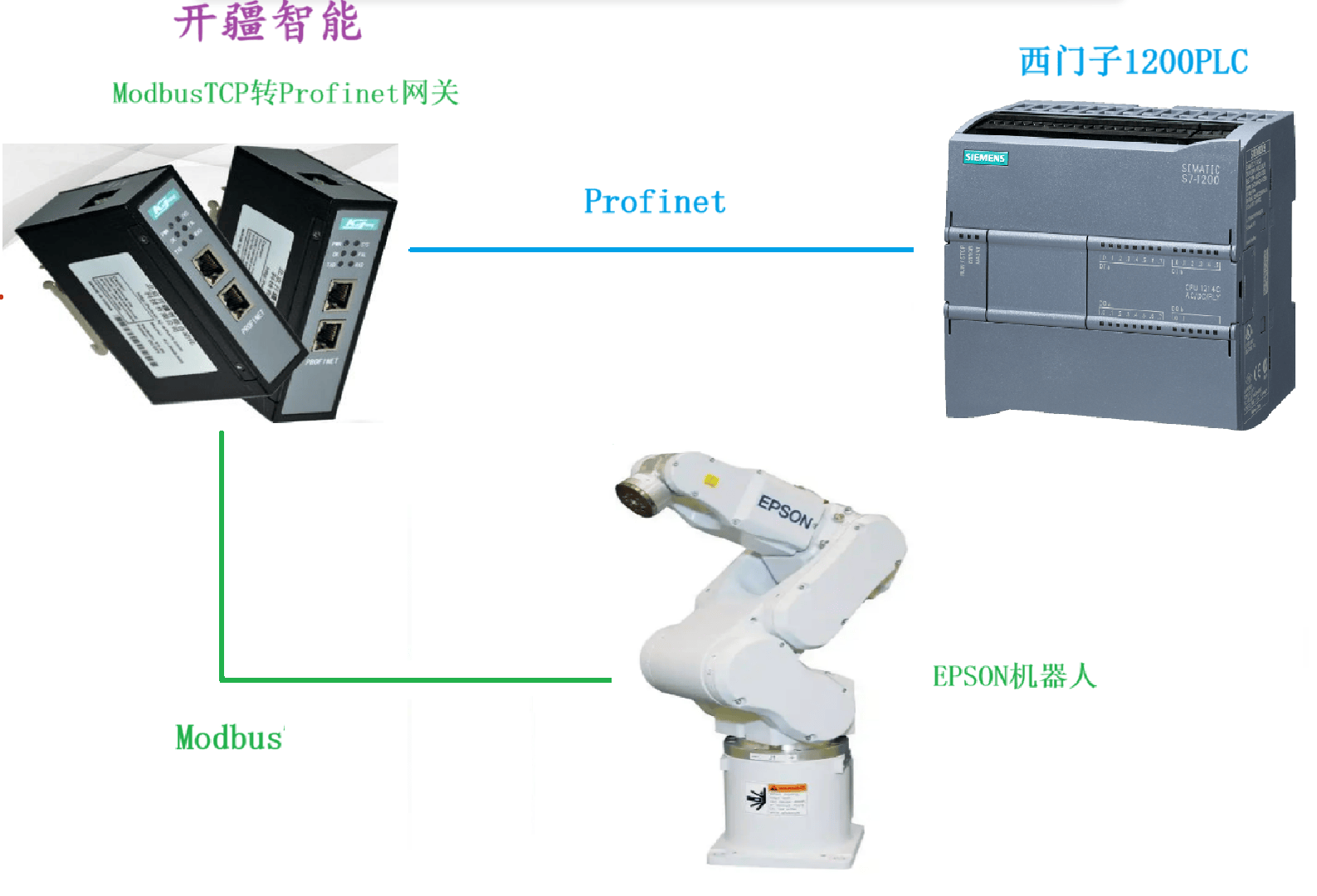
开疆智能ModbusTCP转Profinet网关连接EPSON机器人配置案例
Profinet转Ethernet IP网关接入五轴车床上下料机械手控制系统的配置案例
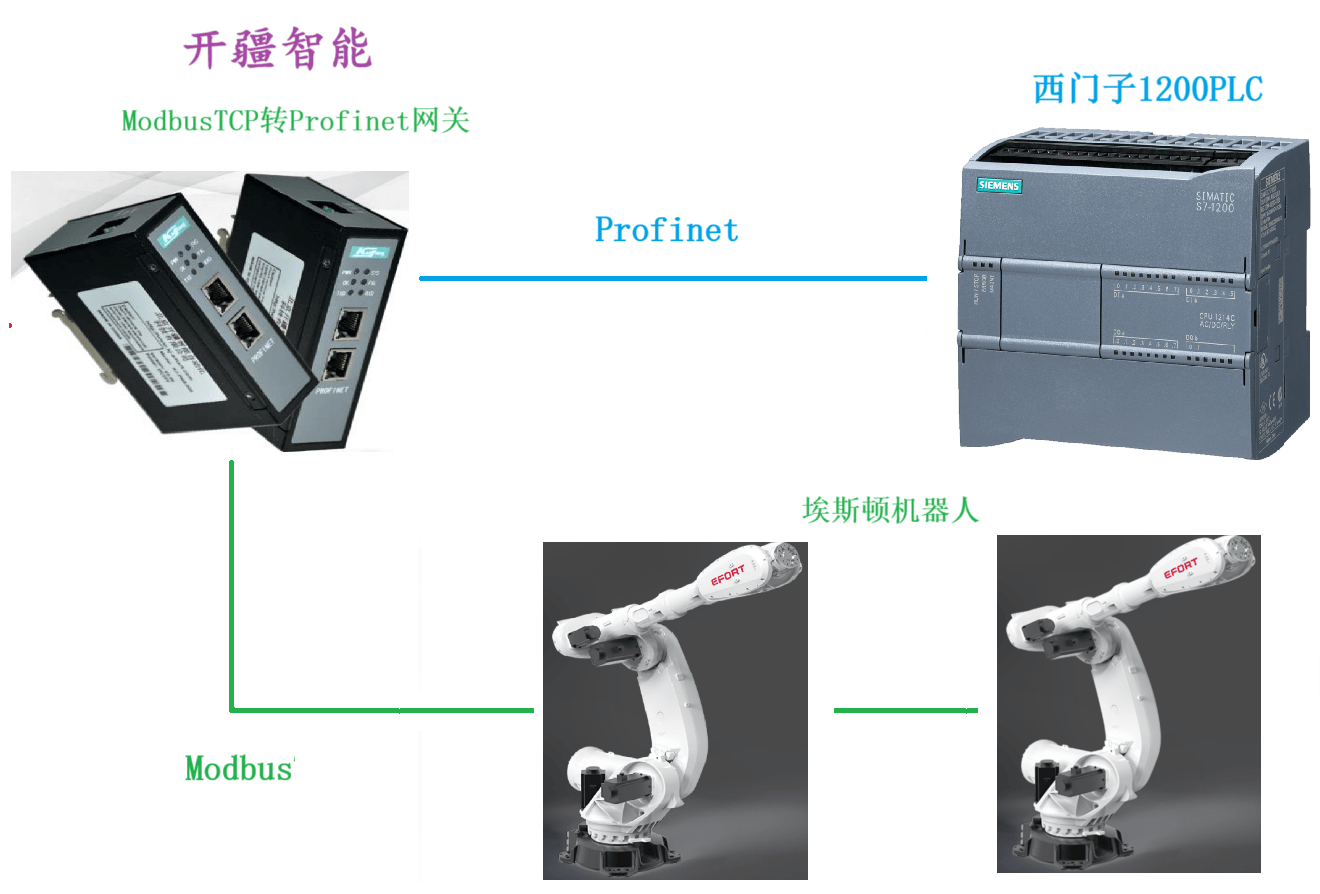
开疆智能ModbusTCP转Profient网关连接ER机器人配置案例
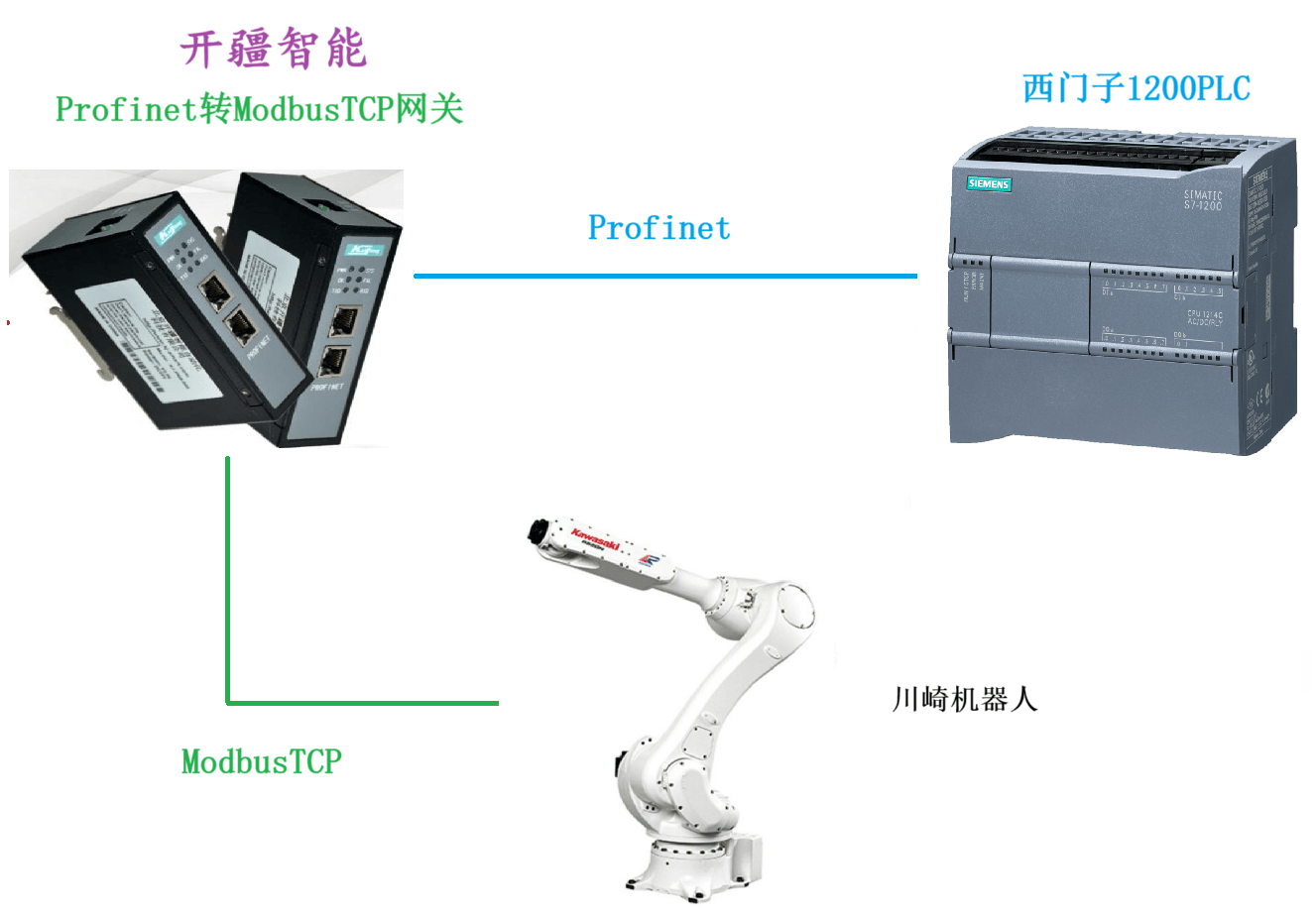
开疆智能ModbusTCP转Profient网关连接西门子PLC与川崎机器人配置案例
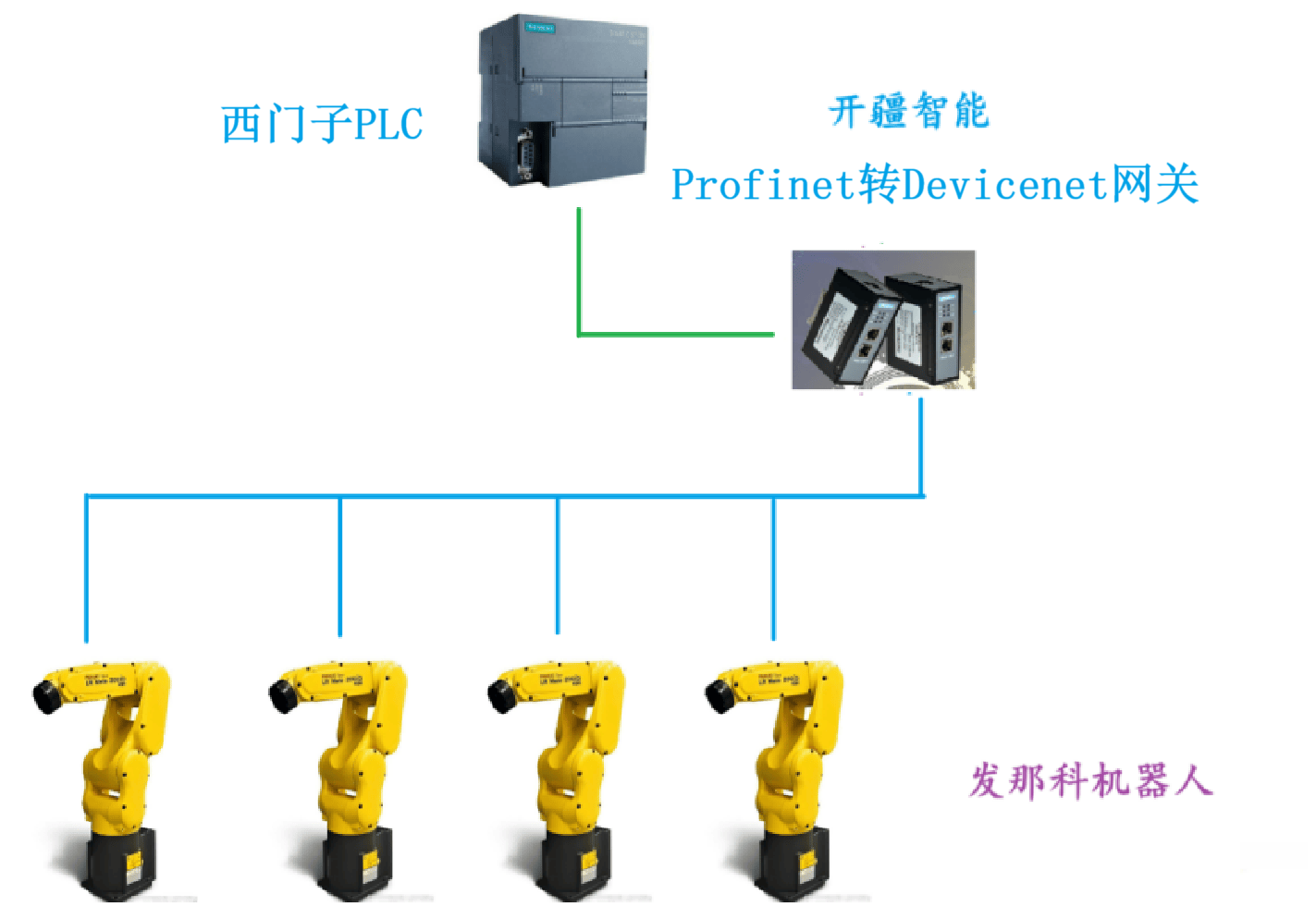
开疆智能Profinet转Devicenet网关连接发那科机器人配置案例
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例

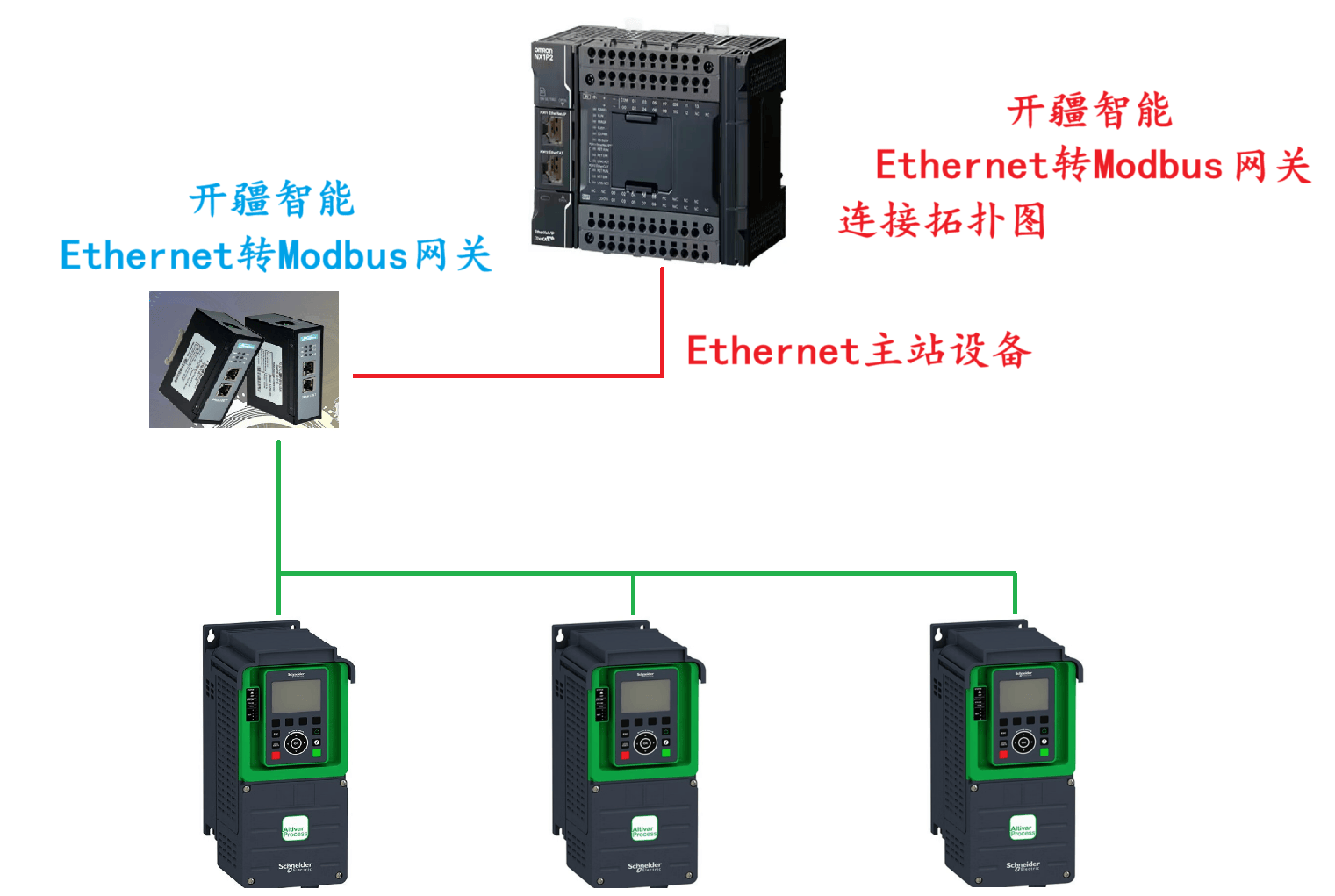
开疆智能Ethernet/IP转Modbus网关连接变频器配置案例
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信




评论