 基于瑞芯微RK3576国产ARM八核2.2GHz A72 工业评估板——ROS2系统使用说明
基于瑞芯微RK3576国产ARM八核2.2GHz A72 工业评估板——ROS2系统使用说明

前 言
本文主要介绍创龙科技TL3576-MiniEVM评估板演示基于Ubuntu的ROS系统(版本:ROS2 Foxy)使用说明,包括镜像编译、镜像替换,以及ROS系统测试的方法。适用开发环境如下。
Windows开发环境:Windows 10 64bit
Linux虚拟机环境:VMware16.2.5、Ubuntu22.04.5 64bit
U-Boot:U-Boot-2017.09
Kernel:Linux-6.1.115
ROS:ROS2 Foxy
ROS(Robot Operating System,下文简称"ROS")是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。
我司ROS系统源码基于ROS官方获取,并基于瑞芯微官方参考文档编译。更多详细信息请查看“6-开发参考资料Rockchip官方参考文档LinuxApplicationNote”目录下的《Rockchip_Instruction_Linux_ROS2_CN》文档。
请先按照调试工具安装、开发环境搭建相关文档,安装SecureCRT串口调试终端、VMware虚拟机等相关软件。无特殊说明情况下,本文默认使用Power IN/USB TO UART0作为调试串口,使用eMMC启动系统,通过路由器与PC机进行网络连接,请确保PC机、Ubuntu系统可正常访问互联网。
评估板简介
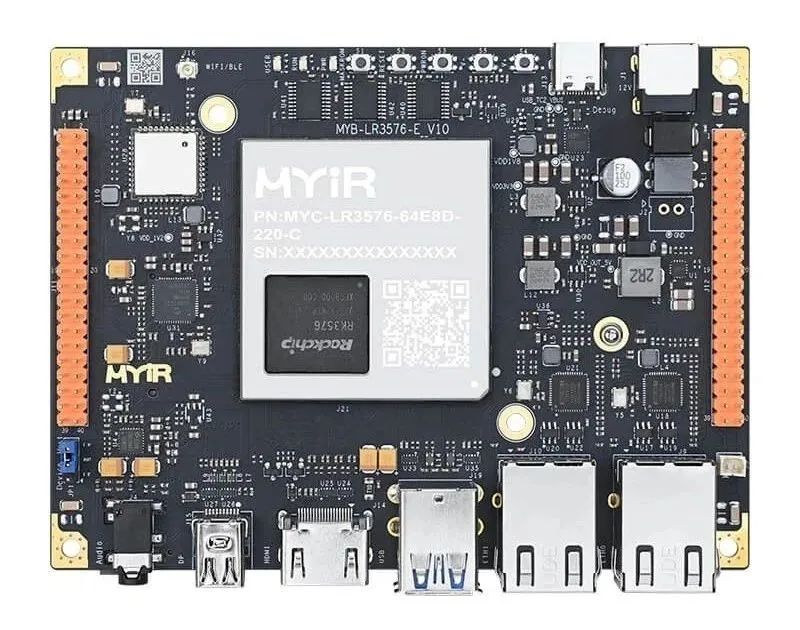
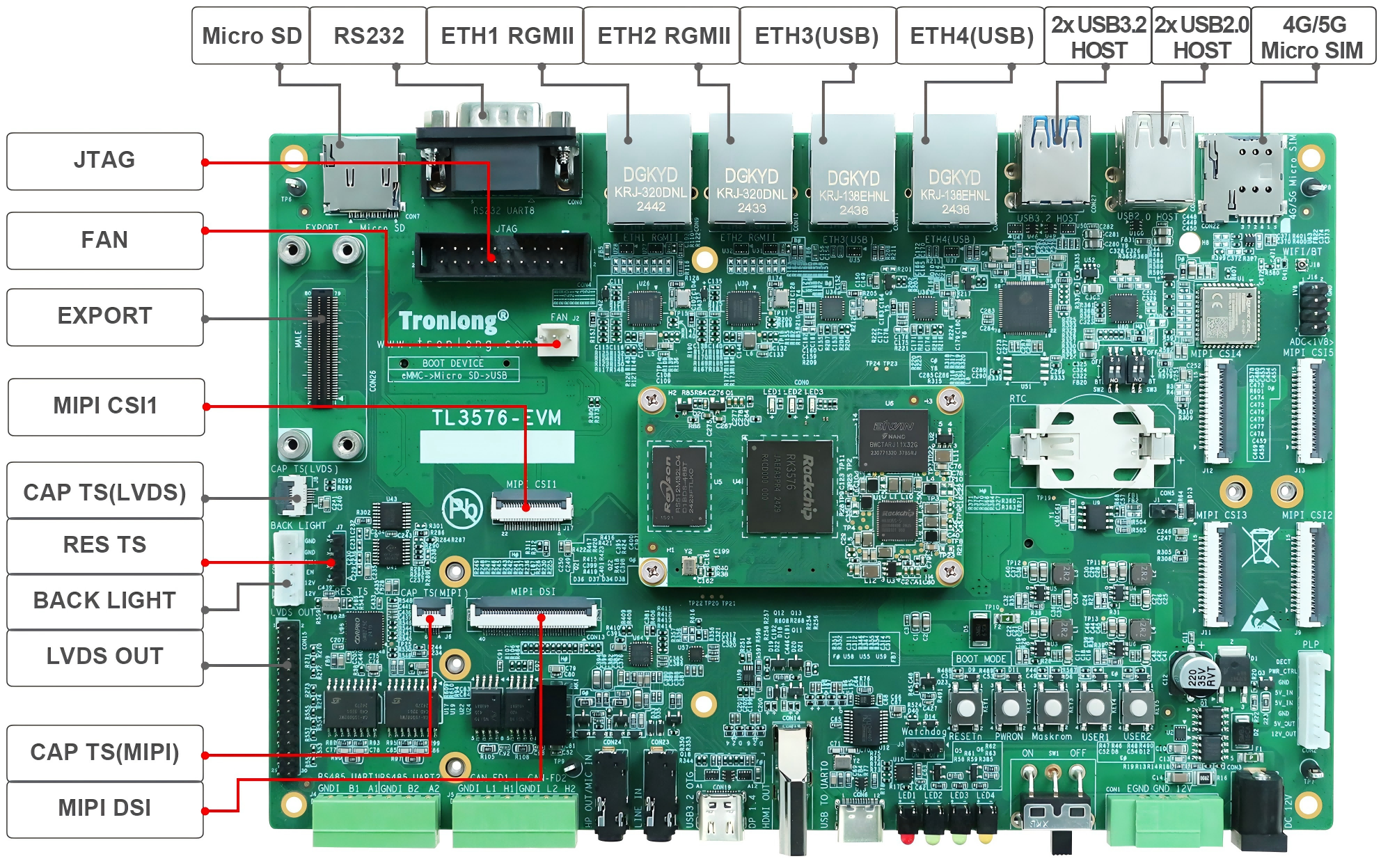
创龙科技TL3576-MiniEVM是一款基于瑞芯微RK3576J/RK3576高性能处理器设计的4核ARM Cortex-A72 + 4核ARM Cortex-A53 + ARM Cortex-M0国产工业评估板,Cortex-A72核心主频高达2.2GHz,Cortex-A53核心主频高达2.0GHz。评估板由核心板和评估底板组成,核心板CPU、ROM、RAM、电源、晶振等所有元器件以及评估底板元器件均采用国产工业级方案,国产化率100%。同时,评估底板大部分元器件亦采用国产工业级方案,国产化率约为99%(按元器件数量占比,数据仅供参考)。核心板经过专业的PCB Layout和高低温测试验证,支持选配屏蔽罩,质量稳定可靠,可满足各种工业应用环境要求。
评估板引出2路Ethernet、2路USB、Micro SD、UART等通信接口,同时引出2路MIPI CSI、MIPI DSI、DP Display、HDMI OUT、MIC IN/HP OUT等音视频多媒体接口,支持4K@60fps H.265/H.264视频编码、8K@30fps H.265/4K@60fps H.264视频解码。
评估板体积小巧,尺寸为80mm*130mm,可作为卡片式电脑使用,且便于产品集成,方便用户快速进行产品方案评估与技术预研。

评估板硬件资源图解1

评估板硬件资源图解2
ROS系统测试
请使用网线将评估板ETH1 RGMII网口、PC机连接至同一个路由器,执行如下命令,安装netifaces库。
Target# apt-get update
Target# apt-get install python3-netifaces
图 1
执行如下命令,配置评估板测试环境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh

图 2
执行如下命令,创建Log目录,用于保存ROS程序运行的Log。
Target# mkdir -p /root/.ros/log

图 3
执行如下命令,启动ROS节点订阅消息。
Target# ros2 run demo_nodes_py listener &

图 4
执行如下命令,启动ROS节点发布消息,实现订阅消息节点与发布消息节点之间的通信。此时评估板串口调试终端将会打印两节点间通信的信息,如下图所示。按"Ctrl + C"可退出测试程序,即让发布消息的节点退出。
Target# ros2 run demo_nodes_py talker
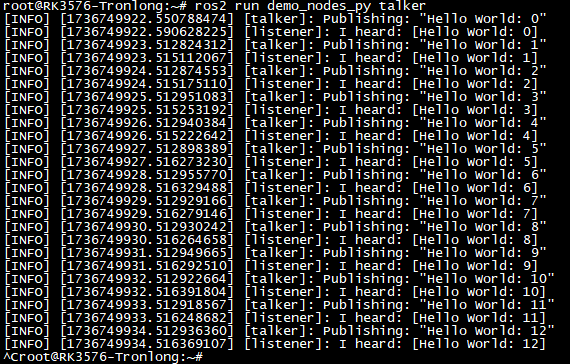
图 5
执行如下命令,查看并根据系统进程号关闭所有ROS节点。进程号请以实际情况为准。
Target# ps -a
Target# kill 1667
Target# kill 1668
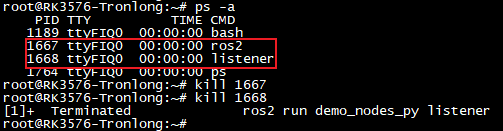
图 6
基于C++的通信功能测试
执行如下命令,启动ROS节点订阅消息。
Target# ros2 run demo_nodes_cpp listener &

图 7
执行如下命令,启动ROS节点发布消息,实现订阅消息节点与发布消息节点之间的通信。此时评估板串口调试终端将会打印两节点间通信的信息,如下图所示。按"Ctrl + C"可退出测试程序,即让发布消息的节点退出。
Target# ros2 run demo_nodes_cpp talker
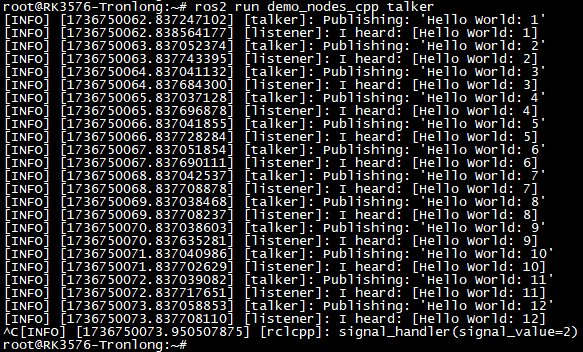
图 8
执行如下命令,根据系统进程号关闭所有ROS节点。进程号请以实际情况为准。
Target# ps -a
Target# kill 1765
Target# kill 1766
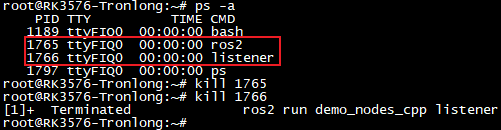
图 9
turtlesim(小海龟)测试
请使用HDMI线将HDMI显示器与评估板HDMI OUT接口连接。然后执行如下命令,配置评估板测试环境。
执行如下命令,后台运行小海龟程序。
Target# ros2 run turtlesim turtlesim_node &

图 10
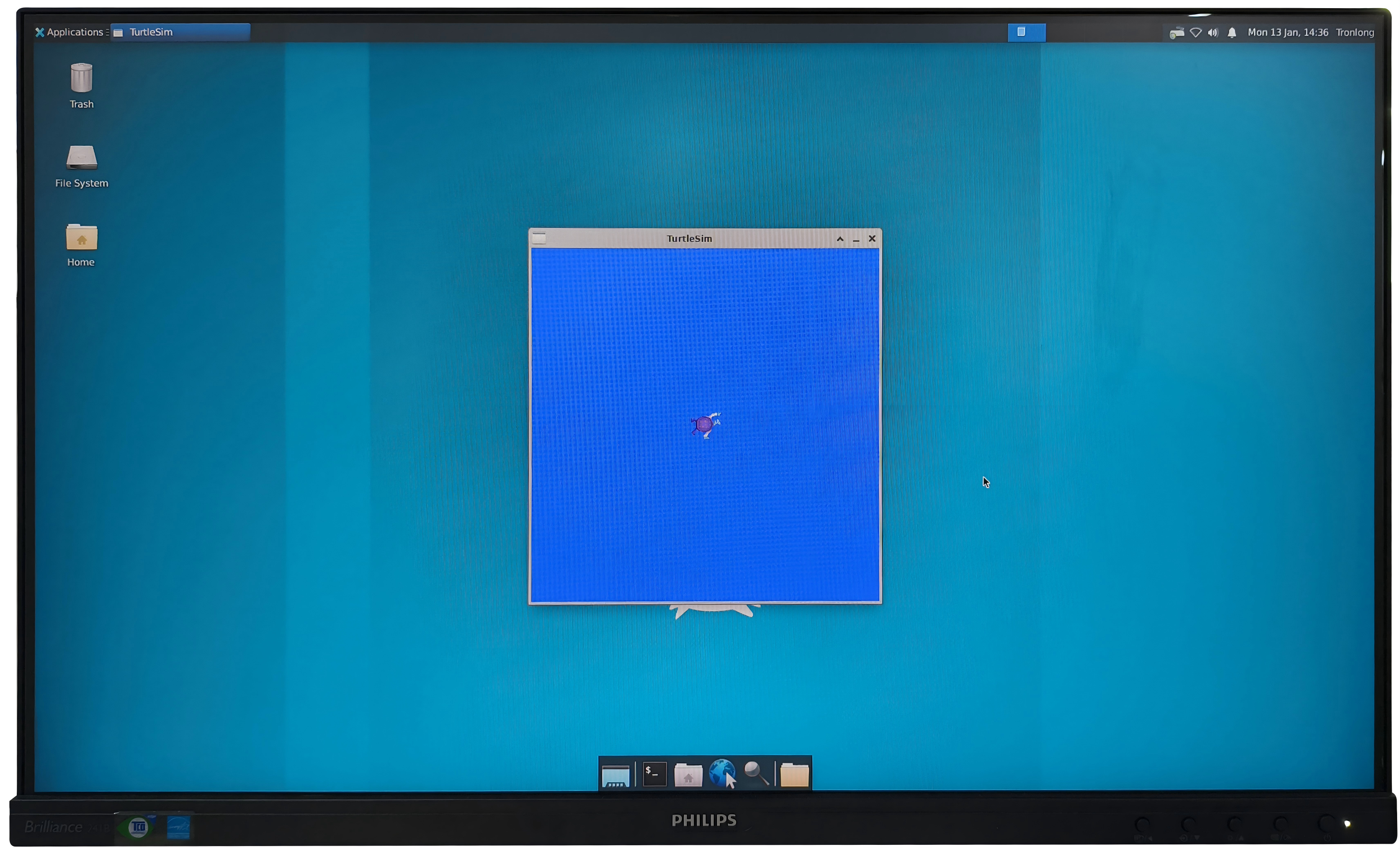
图 11
执行如下命令,发布话题消息,使小海龟转圈。
Target# ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
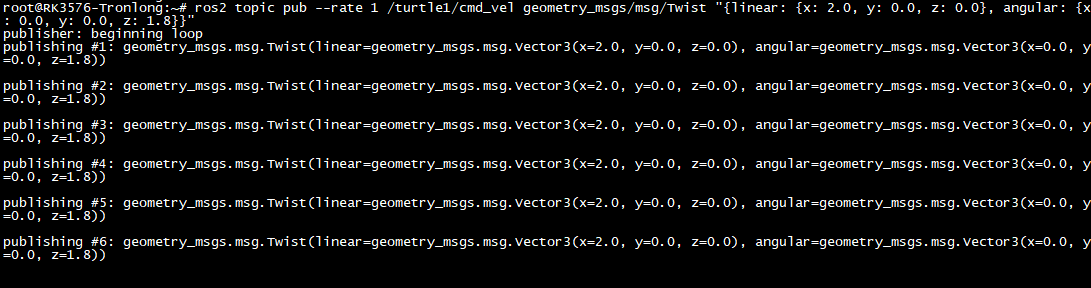
图 12
参数解析:
(1) ros2 topic pub:发布消息到主题;
(2) --rate 1:发布消息速率,设置为1次每秒;
(3) /turtle1/cmd_vel:主题名称;
(4) geometry_msgs/msg/Twist:发布消息类型;
(5) {linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}:发布消息的内容,线速度(linear)为x方向上的2.0、角速度(angular)为z轴方向上的1.8。

图 13
ROS开发
请先参考《Ubuntu系统使用手册》文档“SDK安装”章节正确安装SDK。本小节主要演示基于Ubuntu的ROS系统编译与镜像制作方法。
开发环境搭建
打开Ubuntu终端,执行如下命令,安装编译所需的colcon工具。
Host# sudo apt-get install curl
Host# curl -s https://packagecloud.io/install/repositories/dirk-thomas/vcstool/script.deb.sh | sudo bash
Host# sudo apt update
Host# sudo apt-get install -y python3-pip python3-rosdep2 python3-rosinstall-generator python3-vcstool build-essential
Host# pip3 install -U colcon-common-extensions
Host# pip3 uninstall empy
Host# pip3 install empy==3.3.4
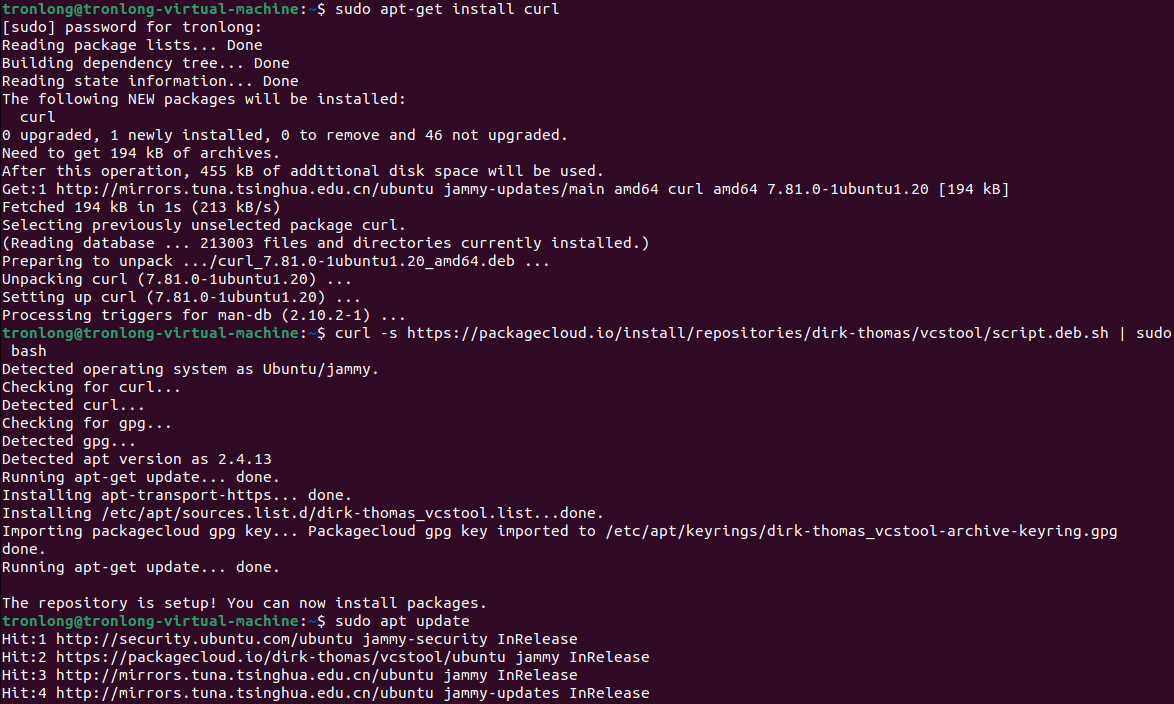
图 14
图 15
图 16
图 17

图 18
图 19
执行如下命令,配置环境变量。
Host# export PATH=${PATH}:/home/tronlong/.local/bin

图 20
编译ROS软件包
请根据交叉编译工具链实际解压路径,执行如下命令,配置交叉编译工具链。
Host# source /home/tronlong/RK3576/rk3576_linux6.1_release/ubuntu/environment

图 21
执行如下命令,创建ROS软件包的工作目录,并进入该目录,目录可命名为任意名称。
Host# mkdir ros2_project_test
Host# cd ros2_project_test

图 22
执行如下命令,创建ROS软件包源码目录,并进入该目录。
Host# mkdir src
Host# cd src

图 23
执行如下命令,在源码目录下生成my_package包。本案例以构建CPP功能包为例,如需构建Python功能包可将参数ament_cmake改为ament_python。
Host# ros2 pkg create --build-type ament_cmake --node-name my_node my_package
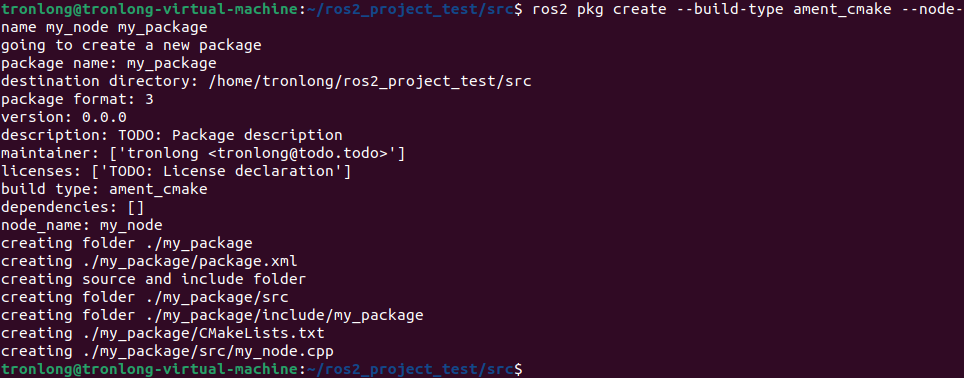
图 24
参数解析:
--build-type ament_cmake :指定软件包的构建类型为ament_cmake;
--node-name my_node:为软件包指定了一个my_node节点;
--my_package:软件包的名称为my_package。
完成构建后,ROS软件包源码目录结构如下所示。可根据实际需要对"my_package/src/my_node.cpp"进行修改。
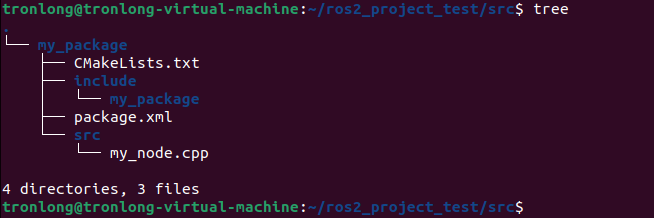
图 25
返回ROS软件包工作目录,编译软件包。
Host# cd ..
Host# colcon build

图 26
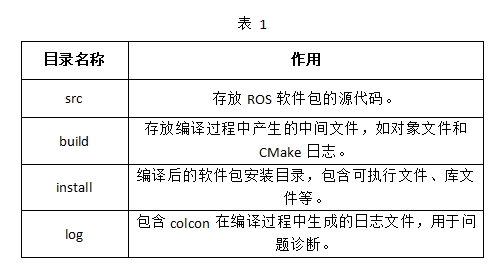
编译完成后在当前目录下生成如下目录,目录内容如下表所示。

图 27
ROS软件测试
请将完成编译的ROS软件包中install目录拷贝至评估板文件系统"/opt/ros/"目录下,执行如下命令配置ROS的运行环境与命令行工具。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh

图 28
执行如下命令,加载ROS软件包环境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros/install
Target# source /opt/ros/install/local_setup.sh

图 29
执行如下命令,运行ROS软件包,可以看到当前ROS软件包程序运行打印结果。
Target# ros2 run my_package my_node

图 30
想了解更多资料,可前往创龙科技官网或微信公众号。
审核编辑 黄宇
-
ARM
+关注
关注
135文章
9588浏览量
393623 -
评估板
+关注
关注
1文章
1034浏览量
31323
发布评论请先 登录
开发必看,RK3576基于Ubuntu22.04安装 测试ROS2机器人系统

瑞芯微RK3576基于Linux平台CUPS架构标准打印机适配实战教程

米尔RK3576成功上车!ROS2 Humble生态系统体验
基于合众恒跃rk3576 开发板deepseek-r1-1.5b/7b 部署指南

创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—ROS2系统使用说明

RK这2款旗舰芯片RK3588 PK RK3576,谁是最优选

全国产!瑞芯微 RK3576 ARM 八核 2.2GHz 工业开发板—Linux应用开发手册
全国产!瑞芯微 RK3576 ARM 八核 2.2GHz 工业开发板—Linux开发环境搭建
全国产!瑞芯微 RK3576 ARM 八核 2.2GHz 工业开发板—Linux系统使用手册
全国产!瑞芯微 RK3576 ARM 八核 2.2GHz 工业开发板—LVGL应用开发案例



评论