 拒绝“人工智障”!VLM让RDK X5机器狗真正听懂“遛弯”和“避障
拒绝“人工智障”!VLM让RDK X5机器狗真正听懂“遛弯”和“避障

项目思路
现有跨形态机器人控制需为不同硬件单独设计策略,开发成本高且泛化性差。本课题尝试使用语言指令统一接口,用户用自然语言指挥不同形态机器人完成同一任务,通过分层强化学习框架,高层视觉语言模型(VLM)解析任务生成中间指令,再通过低层强化学习策略适配不同形态的底层动作,通过仿真器快速训练跨形态通用策略,最后部署到真机运行———田和坤 、冯紫嫣 、殷孟浩
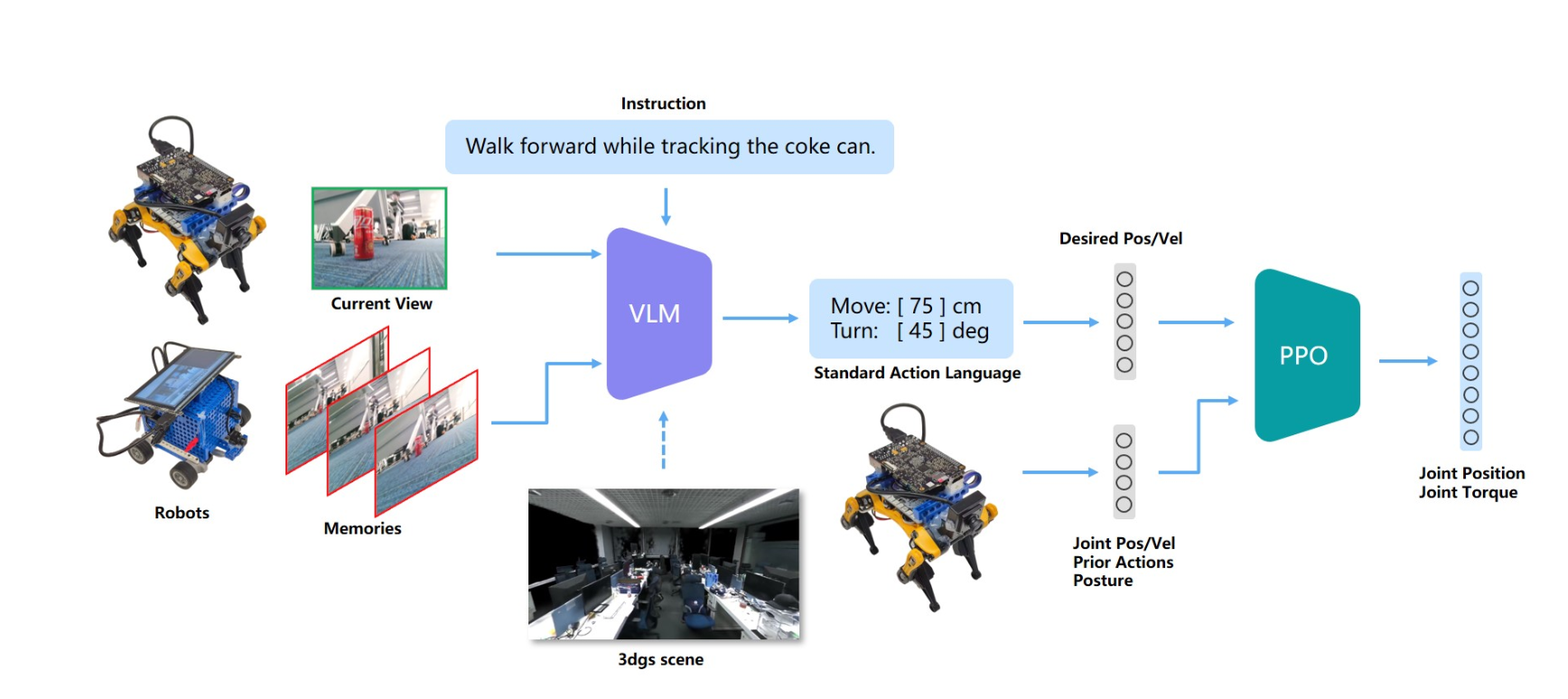
现有跨形态机器人(如四足、轮式、人形)控制通常需为不同硬件单独设计策略,开发成本高且泛化性差。本课题提出一种基于语言-视觉分层强化学习的跨形态机器人通用控制架构,旨在通过自然语言指令统一接口,实现多形态机器人的任务适配与高效控制。具体而言,高层视觉语言模型(VLM)解析用户指令并生成标准化中间指令(如“左转30度”),低层强化学习策略则根据机器人形态参数化编码,将中间指令映射为具体形态的底层动作(如四足步态或轮式转向)。通过NVIDIA Isaac Sim仿真器快速训练跨形态通用策略,并结合X5 RDK人形机器人及四足机器人进行真机验证,本课题展示了同一语言指令在不同形态机器人上的高效执行能力。实验结果表明,该框架在动态避障、复杂地形适应及任务重规划等方面具有显著优势,为跨形态机器人控制提供了一种低成本、高泛化的解决方案。
拟采用技术方案
拟采用分层强化学习架构,使用高层VLM完成从图像与自然语言输入到标准化中间指令的输出的转换,再使用底层RL策略完成最终动作序列的生成。采用mujoco+多形态机器人模型进行仿真验证,最终尝试跨机器人平台的真机部署。
预期展示效果
仿真环境下完成同一指令“绕过障碍物进入右侧房间”驱动四足/轮式机器人进行不同路径规划与动作执行,真机使用自己搭建轮式小车+Petoi Bittle进行展示。后续增加更多语言交互。
X5 RDK用法
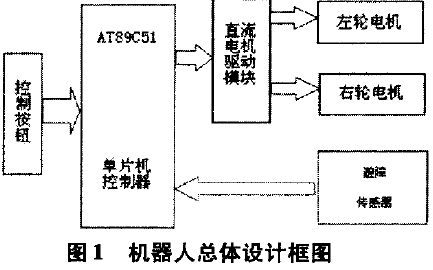
整合X5的RGB摄像头、IMU数据,输入高层VLM和低层策略,通过ROS2桥接,接收低层策略输出的关节目标角度,转换为电机控制指令。
仿真器验证内容
训练四足策略后,冻结高层VLM,仅微调低层进行人形机器人与轮式机器人的适配。仿真环境中随机生成障碍物、地形起伏、光照变化,验证策略鲁棒性,同时对比端到端的RL策略的效率与所需算力差异。
真机演示内容
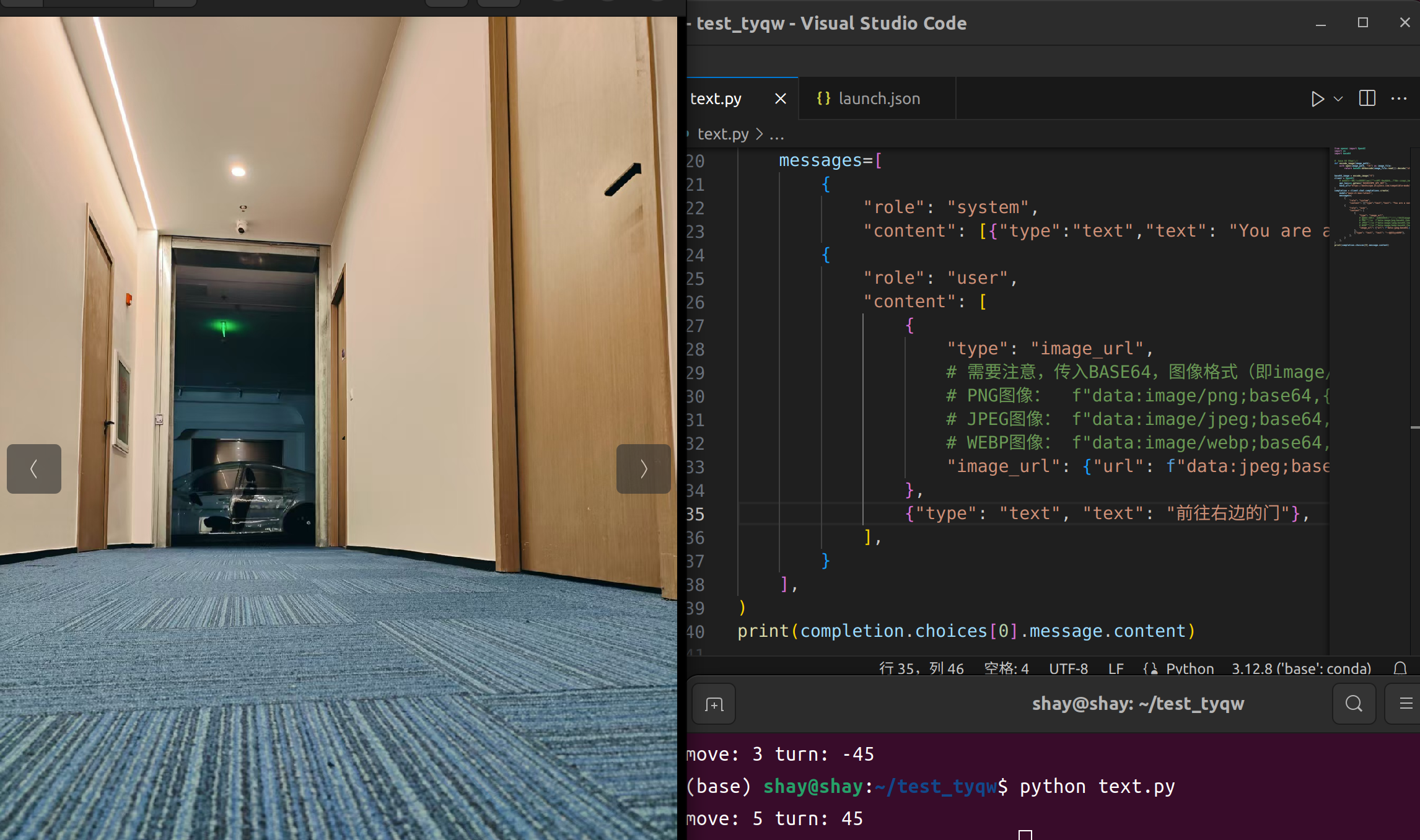
轮式机器人执行“沿走廊前进,在第二个门口右转”,足式机器人完成“避开地面杂物,将指定物品放置到指定位置”。
项目预算
一台用于强化训练的工程机(或云服务器算力支持),3D打印,舵机升级电机(待定)
项目进度与计划
仿真方面目前已完成仿真环境的搭建与模型构建,后续会注重数据获取、强化训练与真机部署。
方案验证
高层VLM
目标:完成自然语言到中间动作指令的转化,在简单任务(如移动)上不依赖机器人特定形态。
使用VLM完成Navigation任务,实则更接近VLA而不是VLN,前者更关注场景内容理解与交互,后者则专注于路径规划。
采用开源VLM模型微调。
- openVLA:直接输出端到端数据,依赖特定形态,不适用
- LLaVA:本地部署7B模型,对空间感知太差,且运行速度达不到要求(约1item/min)
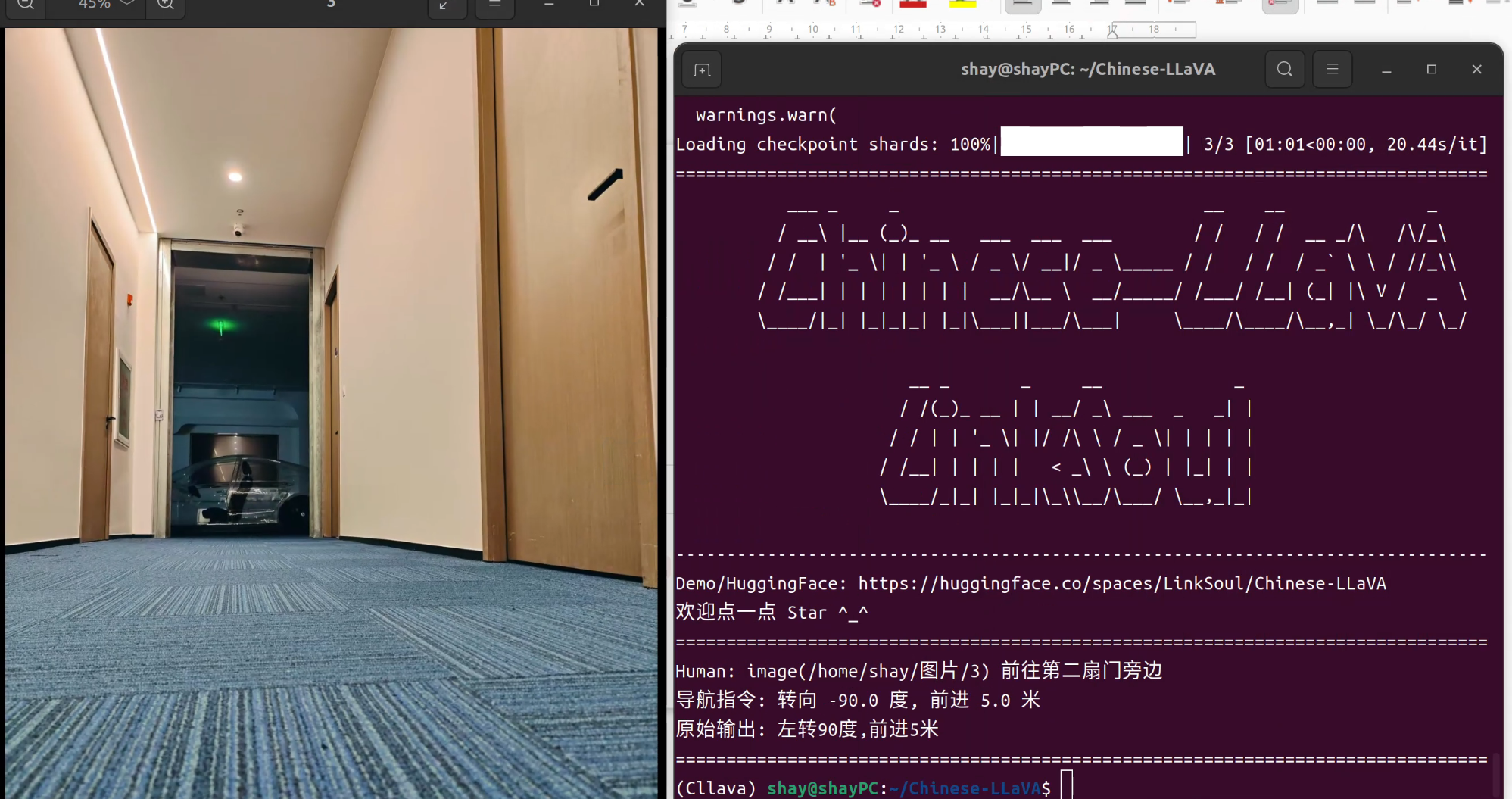
- Qwen-72B:直接暴力增加参数数量,缺点是无法本地部署,优点是在特定场景效果较好,不需要微调即可进行一定程度的空间感知:
对Qwen-72B进行数据采集并微调:前后手动拍摄了80+场景照片与对应描述prompt,使用官方api进行微调,可惜微调后的模型部署太贵(160r/h),最终放弃。
转变方案:不要求VLM实现精确的位置估计(尤其是不使用深度相机的情况下),而是粗略判断距离,输出下一步的任务指令。这样原生的Qwen-72B就可以实现了。
低层PPO
目标:完成中间动作指令到机器人关节角度与力矩的转化,可能的情况下实现这部分的跨形态(未验证,需要解决变长输出的问题)。
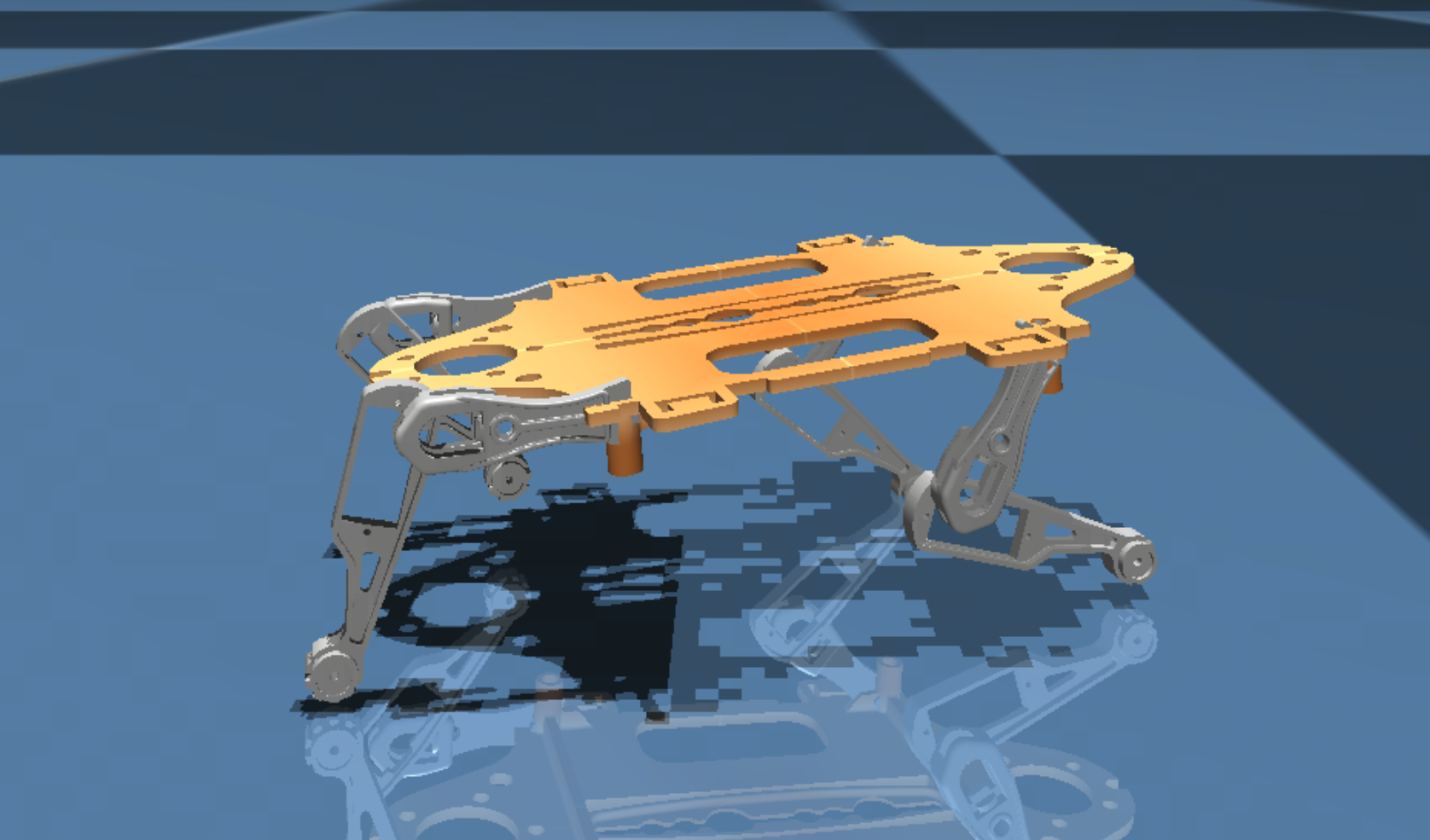
RL主要针对四足机器人,实现一个基于Stable-Baselines3的mujoco仿真环境进行训练。基本要求是保持平稳的情况下直走、转弯,考虑到VLM频率很低(1item/s),后续需要加一个速度的跟踪用来实时避障,这部分也由RL实现。
项目进度
- week1:仿真场景搭建,足式、轮式机器人建模与控制测试

- week2:搭建高层VLM,完成多模态控制目标输入,实现生成中间指令正确率>80%,X5RDK完成轮式sim2real优化与演示

- week3:部署低层四足PPO策略训练仿真,初步完成跨形态任务测试
2.20仿真:
2.21实机:

- week4:尝试3dgs场景下的高精度仿真

-
机器人
+关注
关注
213文章
31444浏览量
223669 -
人工智能
+关注
关注
1820文章
50325浏览量
266967 -
机器狗
+关注
关注
3文章
192浏览量
11051
发布评论请先 登录
【KittenBot机器人试用申请】KittenBot绘图避障机器人学习课程
解读机器人的几大避障技术
如何进行简易避障机器人的设计
避障不“智障”?为扫地机器人打造智能“闪避”系统




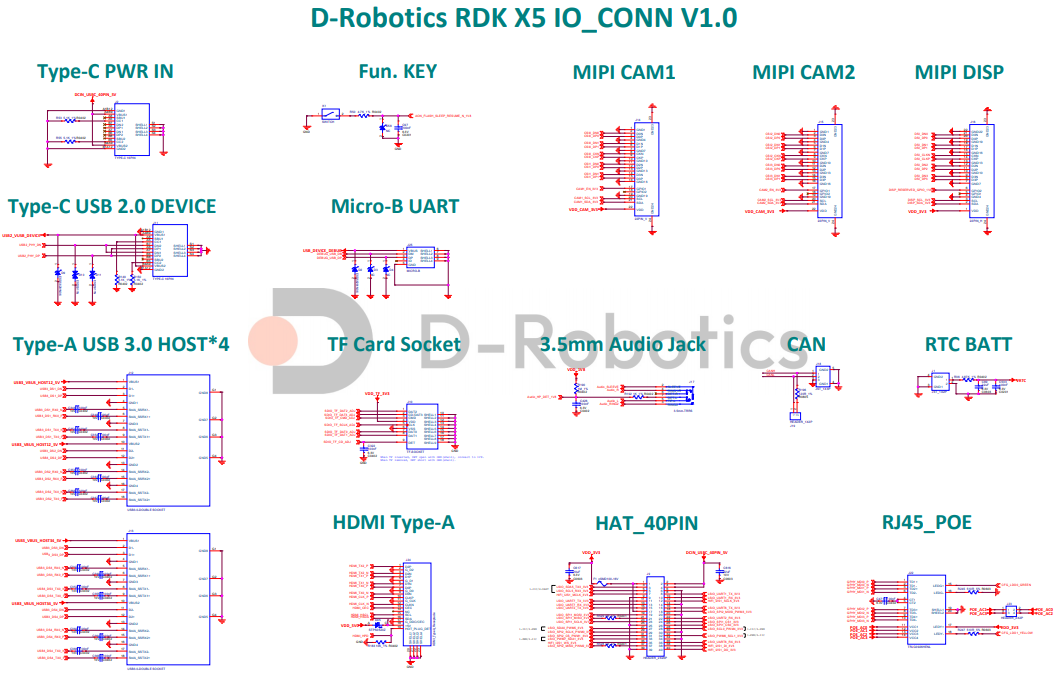
地瓜机器人RDK X5 规格书与地瓜机器人RDK X5原理图
TuyaOpen开源框架+地瓜RDK X5开发板=激光雷达避障、人体追踪的智能小车




评论