 自动驾驶雷达系统设计权威指南 —助力突破高频率与低功耗瓶颈
自动驾驶雷达系统设计权威指南 —助力突破高频率与低功耗瓶颈

自动驾驶的核心在于环境感知,而雷达是唯一能在雨雾、强光等极端条件下稳定工作的传感器。随着行业向 L3 + 级自动驾驶迈进,毫米波雷达的高精度(79GHz)与高可靠性成为关键。松下工业《雷达技术白皮书》深度解析:
✅ 79GHz 高频雷达的技术突破 :如何提升分辨率同时降低数据处理负荷?
✅ 散热与功耗平衡 :耐高温元件如何应对高频率带来的发热挑战?
✅ 全场景元件选型 :从电源管理到信号处理,松下如何用 AEC-Q200 元件保障系统稳定性?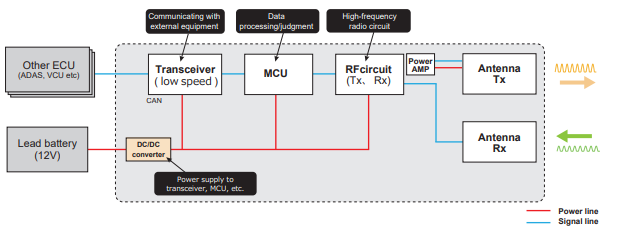
白皮书核心亮点
- 行业趋势与技术挑战
- 毫米波频率升级(24GHz→79GHz)对雷达性能的革命性影响
- 多传感器融合(摄像头 + LiDAR + 雷达)的协同优化策略
- 松下雷达系统解决方案
- 实战设计案例
立即下载,获取
*附件:自动驾驶雷达系统设计权威指南 —助力突破高频率与低功耗瓶颈.pdf
- 雷达系统架构图与关键元件选型矩阵
- 松下高频元件性能对比表(79GHz vs 24GHz)
- ADAS 系统多传感器融合技术路线图
文章内的相关技术和产品关键术语
半导体和电子技术:
- 高频雷达技术(79GHz / 24GHz)
- 毫米波雷达
- 多传感器融合(摄像头、LiDAR、雷达)
- 等效串联电阻(ESR)
- 金属磁性材料
- ESD 抑制器
- 信号完整性优化
- 电磁干扰(EMI)
- 滤波器
- 压敏电阻
- 电源管理
- 功率密度
- 耐高温元件
- AEC-Q200 标准(汽车电子元件可靠性认证)
- 导电聚合物电容
- 汽车功率电感器
- 高频率切换
- 数据分辨率
- 散热设计
产品:
- 导电聚合物电容(低 ESR,支持高频切换)
- 汽车功率电感器(金属磁性材料,大电流高频率应用)
- ESD 抑制器(0.1pF 超低电容)
- 电源模块(小型化、高功率密度)
- ADAS 系统(高级驾驶辅助系统)
公司:
- 松下工业(Panasonic Industrial)
- 电子发烧友网(发布平台)
芯片型号:
- 雷达系统架构图
- 关键元件选型矩阵
- 松下高频元件性能对比表(79GHz vs 24GHz)
其他:
- L3+ 级自动驾驶
- 多传感器协同优化策略
- 电源稳定性设计
- 电磁干扰抑制(降低 90% 以上)
- 系统稳定性保障(通过 AEC-Q200 元件)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
雷达系统
+关注
关注
7文章
262浏览量
29620 -
自动驾驶
+关注
关注
794文章
14988浏览量
181544
发布评论请先 登录
相关推荐
热点推荐
蘑菇车联自动驾驶巴士正式登陆新加坡
里程碑事件,不仅助力中国自动驾驶巴士突破新加坡自动驾驶应用标准壁垒,更实现了中国自动驾驶巴士首次进入发达国家公共交通骨干网络的
FMCW和ToF激光雷达,哪种更适合自动驾驶?
[首发于智驾最前沿微信公众号]在自动驾驶系统里,激光雷达被视为最重要的感知硬件,其通过激光探测前方路况的具体情况,并生成三维信息。正因为它看得“准”,围绕激光雷达的技术路线一直是
aiSim领衔!国内外自动驾驶仿真软件大全:热门推荐与选择指南
在自动驾驶技术飞速发展的今天,仿真测试已成为自动驾驶算法研发、验证的核心环节,能够大幅降低路测成本、突破场景复现限制,据行业数据显示,约90%的自动驾驶算法测试通过仿真平台完成。目前市
自动驾驶中毫米波雷达到底有何作用?
]自动驾驶汽车为了能够更好地勘测到交通环境,需要多个感知硬件协同工作,由于各感知硬件的功能不同,在自动驾驶行业中被讨论的热度也不一样,摄像头与激光雷达作为主要的感知硬件,一直是行业讨论的热点,而

CW32 MCU在高频率运行下的系统稳定性的提升方案
在嵌入式系统中,CW32 MCU的高频率运行能够显著提高系统的处理速度和响应能力,但也伴随着系统稳定性问题的挑战,特别是跑飞现象的出现。本文将深入探讨CW32 MCU在
发表于 12-04 08:04
L4级自动驾驶数据采集系统首选
级数据记录设备 ,为自动驾驶研发提供端到端的解决方案,助力企业突破数据采集瓶颈。 一、自动驾驶数据采集的三大核心需求 多模态传感器融合 需同
恩智浦4D成像雷达如何助力自动驾驶发展
4D成像雷达凭借卓越的精度、可扩展性和弹性,正在重新定义汽车传感技术。4D成像雷达在全球的部署不断加速,是实现自动驾驶的关键基石。
自动驾驶中超声波雷达、激光雷达、毫米波雷达有何区别?
自动驾驶汽车上,这些雷达又有什么作用? 它们各自怎么工作的? 超声波雷达发射的是人耳听不到的高频声波(常见能见度的工作频率大约在几十千赫兹)

如何确保自动驾驶汽车感知的准确性?
感知的定义及原理 在聊这个话题之前,我们先聊一聊感知是什么,自动驾驶感知系统就是一个把外界变成机器可用信息的工程流水线。感知系统的输入主要依靠如摄像头(可见光、近红外)、激光雷达(Li

自动驾驶中常提的惯性导航系统是个啥?可以不用吗?
每次提到自动驾驶硬件时,大家可能第一反应想到的是激光雷达、车载摄像头、毫米波雷达等,但想要让自动驾驶车辆实际落地,有一个硬件也非常重要,那就是惯性导航

自动驾驶汽车是如何准确定位的?
厘米级的定位精度,并能够实时响应环境变化。为此,自动驾驶系统通常采用多传感器融合的方式,将全球导航卫星系统(GNSS)、惯性测量单元(IMU)、激光雷达(LiDAR)、摄像头、超宽带(

激光雷达在自动驾驶领域中的优势
在自动驾驶系统中,激光雷达起到了至关重要的作用,它是实现高度自动驾驶的关键传感器之一。激光雷达通过发射和接收多束脉冲信号,通过测量ToF(T

新能源车软件单元测试深度解析:自动驾驶系统视角
的潜在风险增加,尤其是在自动驾驶等安全关键系统中。根据ISO 26262标准,自动驾驶系统的安全完整性等级(ASIL-D)要求单点故障率必须低于10^-8/小时,这意味着每小时的故障概
发表于 05-12 15:59
华为受邀出席第一届自动驾驶产业发展论坛
近日,在由中国电动汽车百人会和华为等联合主办的“第一届自动驾驶产业发展论坛”上,华为智能驾驶产品线总裁李文广先生受邀发表了“2025,开启自动驾驶新时代”的主题演讲,围绕自动驾驶技术



评论