 ZMC600E,多核异构如何成就机器人精准控制?
ZMC600E,多核异构如何成就机器人精准控制?

导读
ZMC600E主站控制器凭借其多核异构处理器的强大性能,实现了高算力与高实时性的完美平衡,让机器人动作流畅、精准无误。接下来,让我们深入了解其内核结构的奥秘。
在ZMC600E主站控制器控制机器人的时候,可以精准的控制机器人执行各种高难度动作。仔细观察的话你会发现机器人的每个关节都配合的很好,运行也是非常的流畅,几乎没有卡顿。究竟ZMC600E主站控制器是如何实现这么高算力、高实时性的呢?让我们来一起看看它强大的内核结构。ZMC600E主站控制器 采用的是多核异构的处理器,处理器内部包含2个主频1GHz的64位Arm Cortex-A53内核,4个主频800MHz的Cortex-R5F内核。
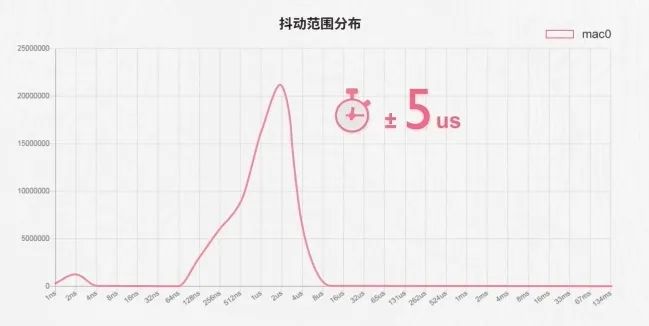
其中Cortex-A53内核运行Linux操作系统,并通过打上RT-Linux补丁来进一步提高系统的实时性,为处理算法、应用等复杂运算提供高算力的性能保障。Cortex-R5F内核则是用来单独处理EtherCAT通讯,当有数据通讯时会第一时间对接收的数据进行处理,而无需处理其他的线程任务,降低了数据的延时和抖动,可实现毫秒周期任务抖动±5μs以内,为延迟特性提供特别出色的实时性能。
通过各个内核之间分工配合的模式,将每个内核的独特优势全部发挥出来,达到高算力、高实时性的效果。大家对ZMC600E还有什么想了解的,欢迎评论区留言。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17872浏览量
195069 -
机器人
+关注
关注
213文章
31422浏览量
223597 -
ethercat
+关注
关注
20文章
1580浏览量
46087
发布评论请先 登录
相关推荐
热点推荐
SiLM2026EN-DG 小封装大能量200V半桥驱动助力机器人精准关节控制
在工业自动化、机器人技术迅猛发展的今天,高效、紧凑、可靠的电机驱动方案成为提升设备性能的关键。SiLM2026EN-DG高压半桥栅极驱动器,200V耐压、强劲驱动电流(290mA/600mA) 以及
发表于 09-04 08:22
免费试用卡酷教育机器人精简版套件
` 本帖最后由 12345bzq 于 2015-1-8 15:44 编辑
卡酷教育机器人精简版套件试用体验本次赠送项目:卡酷机器人精简版套件赠送数量:5套赠送对象:DIY机器人爱好者赠送方式
发表于 01-08 14:40
工业机器人中面对的控制问题是什么
刚开始接触机器人的时候,我在师兄的机器人代码里死活找不到有关控制计算的函数,作为常年和控制框图打交道的我,很是疑惑控制回路去哪里了?因此本文
发表于 06-28 09:29
打造一个异构机器人平台
描述SwarmUS - 异构机器人平台该项目旨在打造一个全包平台,以使异构群体机器人技术成为可能。PCB+展示代码https://github.com/SwarmUS
发表于 07-27 07:07
【新品发布】ZMC600E EtherCAT主站控制器全新上市
更多往期文章,请点击“ 阅读原文 ”。 原文标题:【新品发布】ZMC600E EtherCAT主站控制器全新上市 文章出处:【微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。

ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改
高性能EtherCAT主站控制器ZMC900E是ZLG致远电子开发的最新一代EtherCAT主站控制器,其核心采用多核异构的应用处理器,内核

EtherCAT主站控制器系统实时性测试
EtherCAT作为高效的现场总线网络技术,其实时性能需依赖高实时操作系统才能充分展现。本文以ZMC600E为例,测试系统实时性并分析操作系统抖动数据。ZMC600EEtherCAT主站控制器是广州
ZMC900E控制器之ROS2环境安装指南
ZMC900E是致远电子研发的最新一代高性能EtherCAT控制器,支持ROS2系统,兼备强大功能和实时性,为工业应用带来新的可能。本文将详述ROS2特点和安装,助力用户在机器人上的二次开发
ZMC600E运动控制器T型、S型速度规划详解
。ZMC600E是广州致远电子股份有限公司开发的最新一代高性能智能总线型控制器,是面向工厂智能化时代的机器人控制器。ZMC600E采用
ZMC600E运动控制器直线和圆弧插补算法详解
。ZMC600E是广州致远电子股份有限公司开发的最新一代高性能智能总线型控制器,是面向工厂智能化时代的机器人控制器。ZMC600E采用
【一分钟教程】用ZMC600E实现关节机器人±180度精准转动
又是如何精准而实时的控制它们的“手脚”,从而完成各种高难度动作的?今天我们就用ZLG致远电子的ZMC600E做一个控制机器人运动的例程,实现
探索工业自动化核心:ZMC 系列 EtherCAT 主站控制器
且高效的控制解决方案成为企业提升竞争力的关键。广州致远电子股份有限公司推出的ZMC60E、ZMC600E、ZMC900E以及ZMC900E-
如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?
环境拓扑:ZMC600E主站连接控制TI双从站,使用EtherCAT-Analyzer分析仪抓包数据。pc:运行ZMC主站软件AWStudio、EtherCAT-A
具身机器人走得稳不稳?它可以说了算!
对走得稳!实测环境拓扑:ZMC600E主站连接TI双从站,模拟具身机器人主从节点状态,使用EtherCAT-Analyzer分析仪分析数据。pc:运行ZMC主站软



评论