 如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?
如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?

EtherCAT总线在机器人控制总线里占据重要地位。这次,我们搭建了包含EtherCAT主从站和分析仪的完整环境,用机器人分析仪EtherCAT-Analyzer实际抓取主从站之间的通讯数据。
 实测环境
实测环境

- 拓扑:ZMC600E主站连接控制TI双从站,使用EtherCAT-Analyzer分析仪抓包数据。
- pc:运行ZMC主站软件AWStudio、EtherCAT-Analyzer分析仪软件NetAnalyzer、Wireshark等。
- ZMC600E:控制TI双EtherCAT从站。
- TI从站:执行单元。
- EtherCAT-Analyzer:监听分析主从站通讯数据。
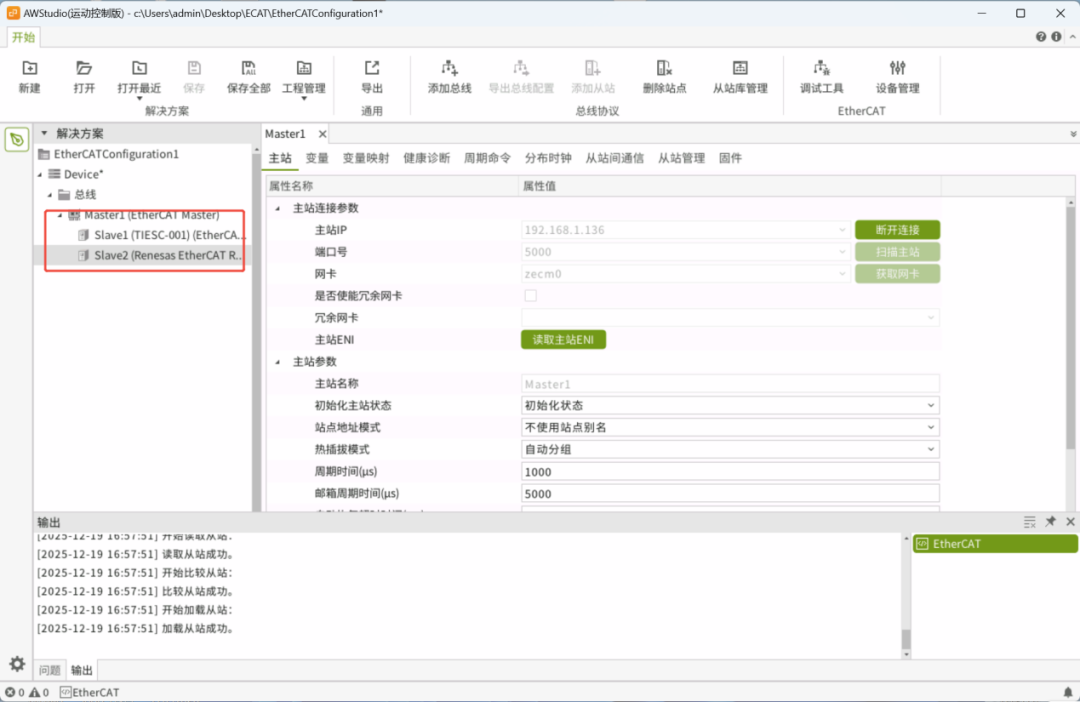
ZMC600E主站配置
ZMC系列主站连接前需要先运行EtherCAT主站程序:1. 配置电脑IP与ZMC同网段(ZMC600E的NET1网口默认IP:192.168.1.136),命令行窗口ping 192.168.1.136来确定是否能正常连接设备。


2. 设备运行master程序,通过WinSCP工具上传到ZMC设备中。

3. Putty切换程序路径和执行程序。

4. 连接主站。

5. 添加从站库。

6. 扫描添加主站连着的从站。

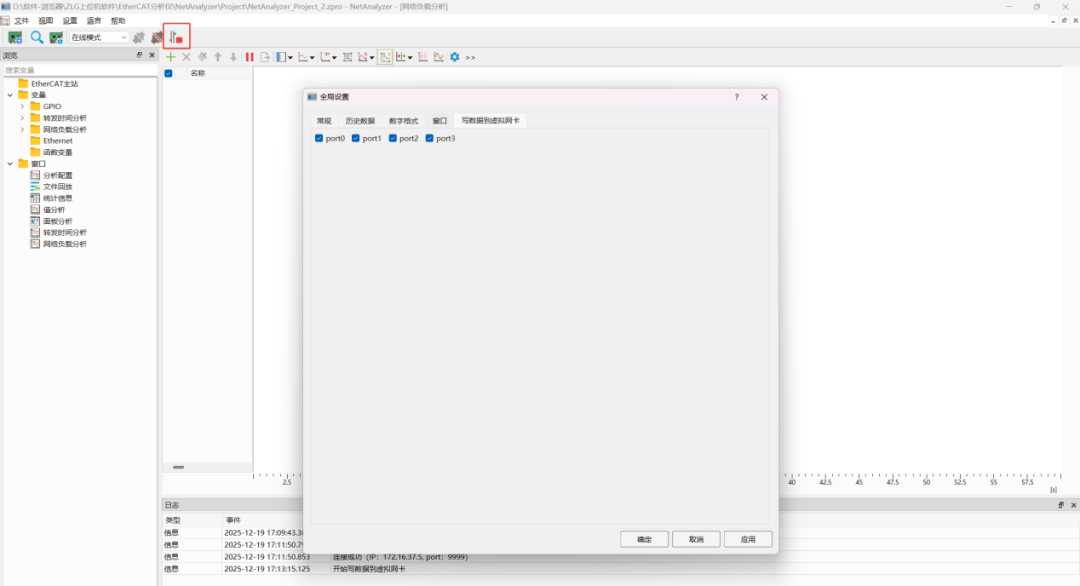
EtherCAT-Analyzer配置
1. 管理员身份运行NetAnalyzer,确保分析仪与网卡处于同一网段。

2. 连接分析仪,映射端口数据到虚拟网卡。
Wireshark抓包
1. 主站启动“在线修改”,开始运行,实现对从站的各项操作控制。

2. Wireshark初始化EtherCAT-Analyzer虚拟网卡,抓取ECAT数据。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
分析仪
+关注
关注
0文章
1790浏览量
54997 -
机器人
+关注
关注
214文章
31672浏览量
224594 -
ethercat
+关注
关注
20文章
1626浏览量
46362
发布评论请先 登录
相关推荐
热点推荐
使用逻辑分析仪Acute TravelLogic Analyzer进行SPI NAND驱动开发调试
使用逻辑分析仪Acute TravelLogic Analyzer进行SPI NAND驱动开发调试

【MYD-CZU3EG开发板试用申请】基于机器视觉的工业机器人抓取工作站
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在
发表于 09-18 14:18
【瑞芯微RK1808计算棒试用申请】基于机器视觉的工业机器人抓取工作站
项目名称:基于机器视觉的工业机器人抓取工作站试用计划:申请理由 本人是嘉兴技师学院教师,浙江机器人有限公司技术顾问。在
发表于 09-18 19:24
ZN-980B机器人搬运码垛工作站介绍
对不同物料进行快速的检测、组装。为了方便实训教学,系统进行了专门的设计,可以完成各类机器人单项训练和综合性项目训练,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、抓取
发表于 07-01 12:48
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统
EPR6-S工业机器人专用六轴伺服驱动器通过EtherCAT转profinet网关与西门子PLC1200连接
本案例EtherCAT转profinet(Profinet转EtherCAT
发表于 10-24 14:04
机器人抓取技术原理分析
最近两天参观了华为的自动化工厂,了解到机器人抓取在工业中的应用以及未来的前景,备受鼓舞。作为一个搞机器人抓取(grasping)接近八年的老grasper,觉得还是可以写写
发表于 09-20 09:21
•3次下载
主从异构手术机器人的运动误差如何进行分析
、设计和制造等方面都产生了不可忽视的影响,需要在研究的基础上,提出适当的解决措施。本文就不同的主从异构机器人的误差分布情况进行了分析和比较,探讨了减小主从异构
发表于 04-15 17:00
•3次下载
一站式EtherCAT网络分析解决方案
ZLG致远电子首款EtherCAT分析仪正式发布!EtherCAT-Analyzer涵盖网络帧统计、帧时间分析、帧内容分析等功能,为用户提供
震撼开箱 | 新一代EtherCAT网络分析仪
选型表型号EtherCAT-Analyzer性能特色高性能工业级EtherCAT网络分析仪,实时分析网络状态EtherCAT路数4普通以太网


如何精准分析人形机器人运动数据?
全球“机器换人”进程加速,人形机器人有望成为AI下一个重要落地应用场景;EtherCAT-Analyzer具备分析人形机器人所有关节和电池与
网络分析仪的分类
网络分析仪主要可以分为两类:标量网络分析仪(Scalar Network Analyzer)和矢量网络分析仪(Vector Network Anal
EtherCAT网络分析仪:工业实时通信的“诊断专家”,让复杂网络透明化
数量激增,如何快速定位延迟、抖动、同步偏差等潜在问题,成为工程师面临的关键挑战。EtherCAT-Analyzer网络分析仪应运而生,以“零干扰、全维度、高精度”

具身机器人走得稳不稳?它可以说了算!
对走得稳!实测环境拓扑:ZMC600E主站连接TI双从站,模拟具身机器人主从节点状态,使用EtherCAT-Analyzer分析仪



评论