 步进控制的光栅尺全闭环解决方案:32轴EtherCAT总线运动控制器ZMC432CL-V2
步进控制的光栅尺全闭环解决方案:32轴EtherCAT总线运动控制器ZMC432CL-V2


您是否还在为步进电机无法在旋转机构、丝杆传动等机械传动平台上无法实现高精度末端定位,未能达到亚微米级加工精度而感到困扰?
传统开环系统困境
传统步进电机方案采用开环控制,用于位置控制,信号单向传递,无法实时监测和纠正机械传动位移误差。当遇到负载变化、步进电机失步或外部干扰时,位置误差无法补偿校正,直接影响加工精度,无法满足用户对亚微米级加工精度的应用需求。

开环控制系统原理示意图
正运动步进控制的光栅尺全闭环解决方案:ZMC432CL-V2
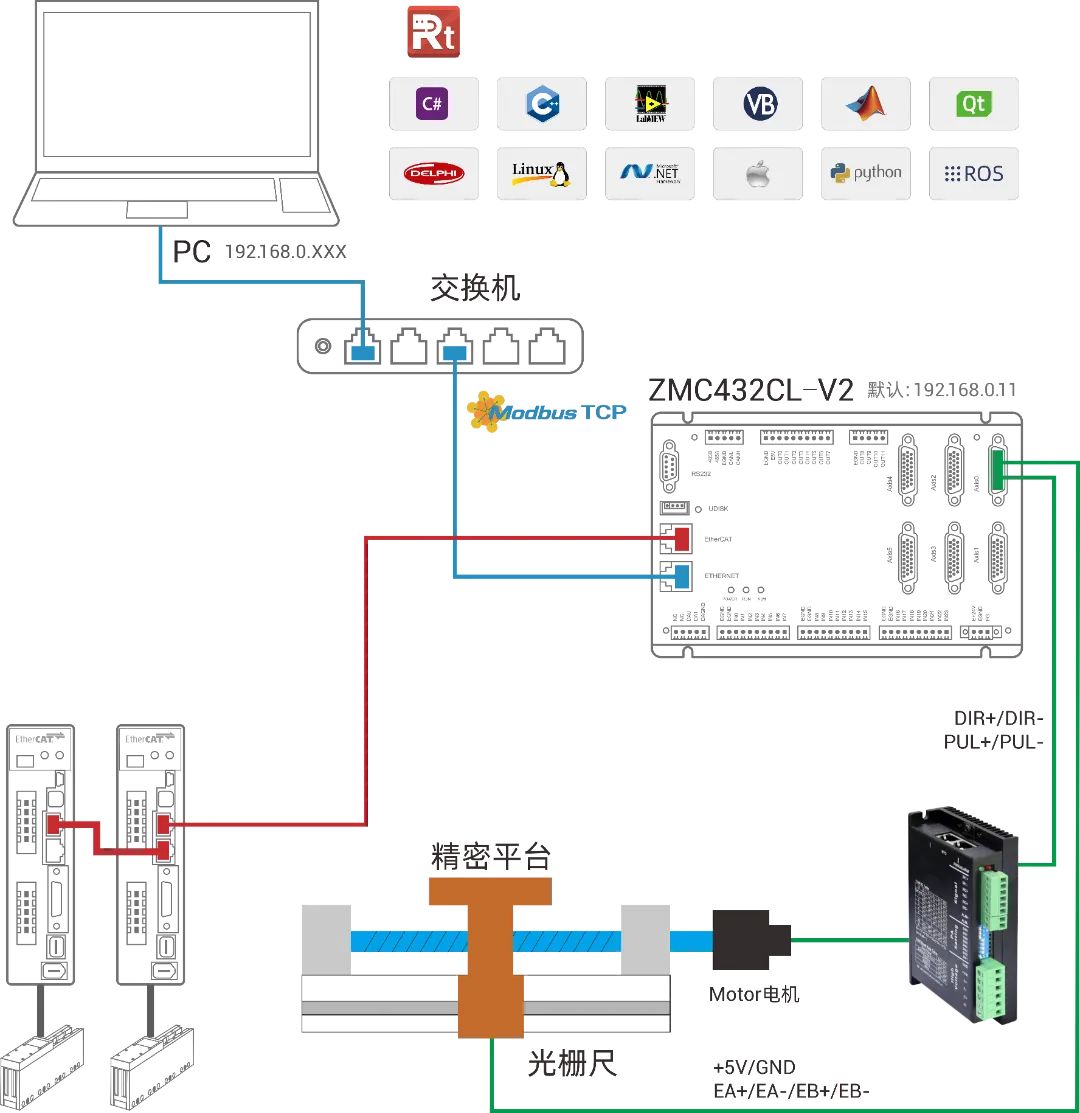
为了解决这些问题,正运动ZMC432CL-V2脉冲全闭环32轴总线型运动控制器应运而生!专为解决步进电机高精度定位应用需求而设计,帮助您轻松实现亚微米级的加工精度!
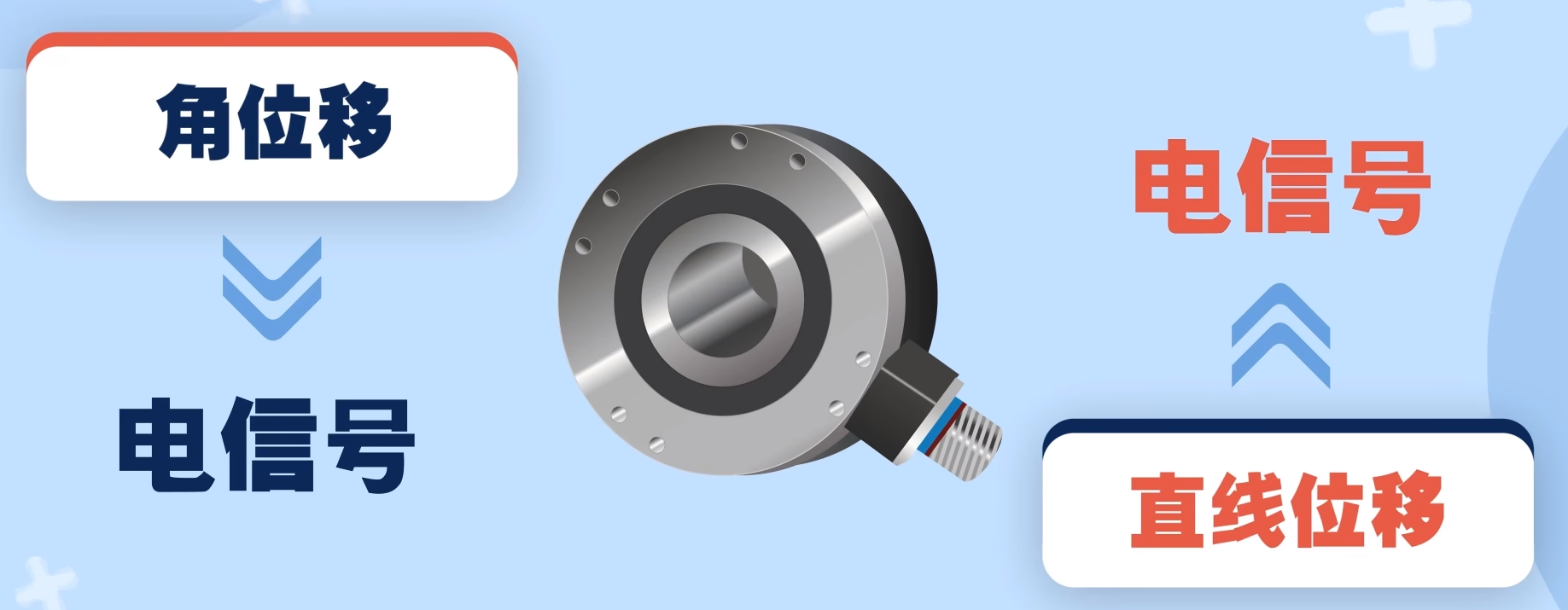
通过引入外置光栅尺全闭环解决方案,再配合控制器内置的补偿算法,可轻松实现动态矫正,有效消除机械传动平台在运动过程中的传动位移误差,保障定位精度,彻底解决步进驱动器在传动过程中可能出现的失步风险。
ZMC432CL-V2产品介绍视频
01 步进电机的外置光栅尺全闭环解决方案
ZMC4系列高效的网口读写,PCIe/PCI系列卡可共享内存接口(共享内存的批量读写3-5us);
内置反向间隙补偿,双向螺距补偿,2D平面补偿等;
可以同时支持脉冲轴和EtherCAT轴运动混合使用;
开放的PT/PVT接口客户可自定义加减速算法的二次编程;
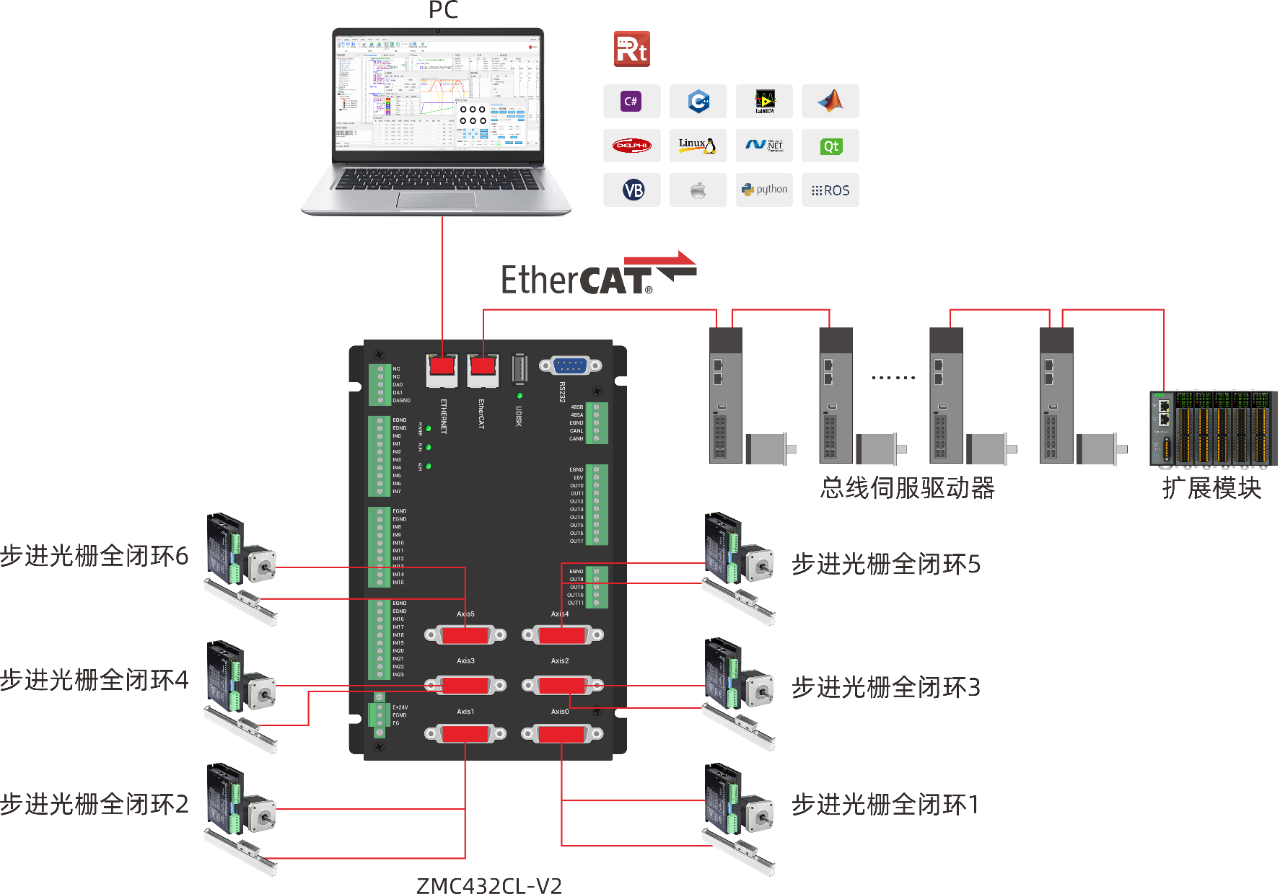
ZMC432CL-V2可支持步进电机的外置光栅尺全闭环解决方案。
正运动技术新品ZMC4系列多轴总线型运动控制器!
解决用户所难,贴近用户实际应用需求!
02 ZMC432CL-V2脉冲全闭环的32轴总线型运动控制器
ZMC432CL-V2是一款高性能运动控制器,具备高速实时反馈功能,支持脉冲全闭环控制,能够实现高精度、高响应速度的运动控制。高精度定位,有效消除机械传动误差,满足高精密加工场景应用要求。
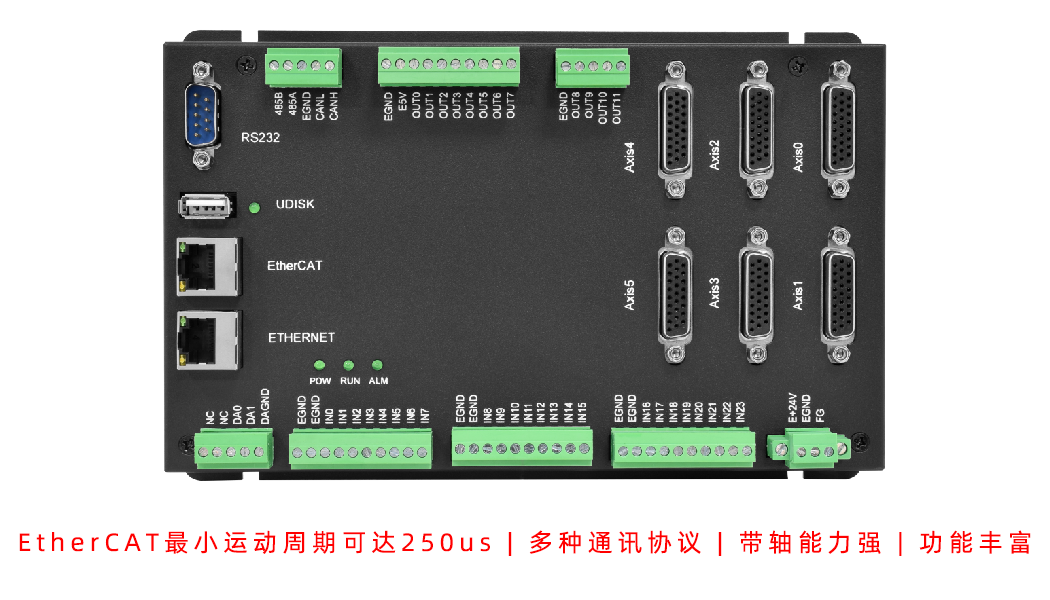
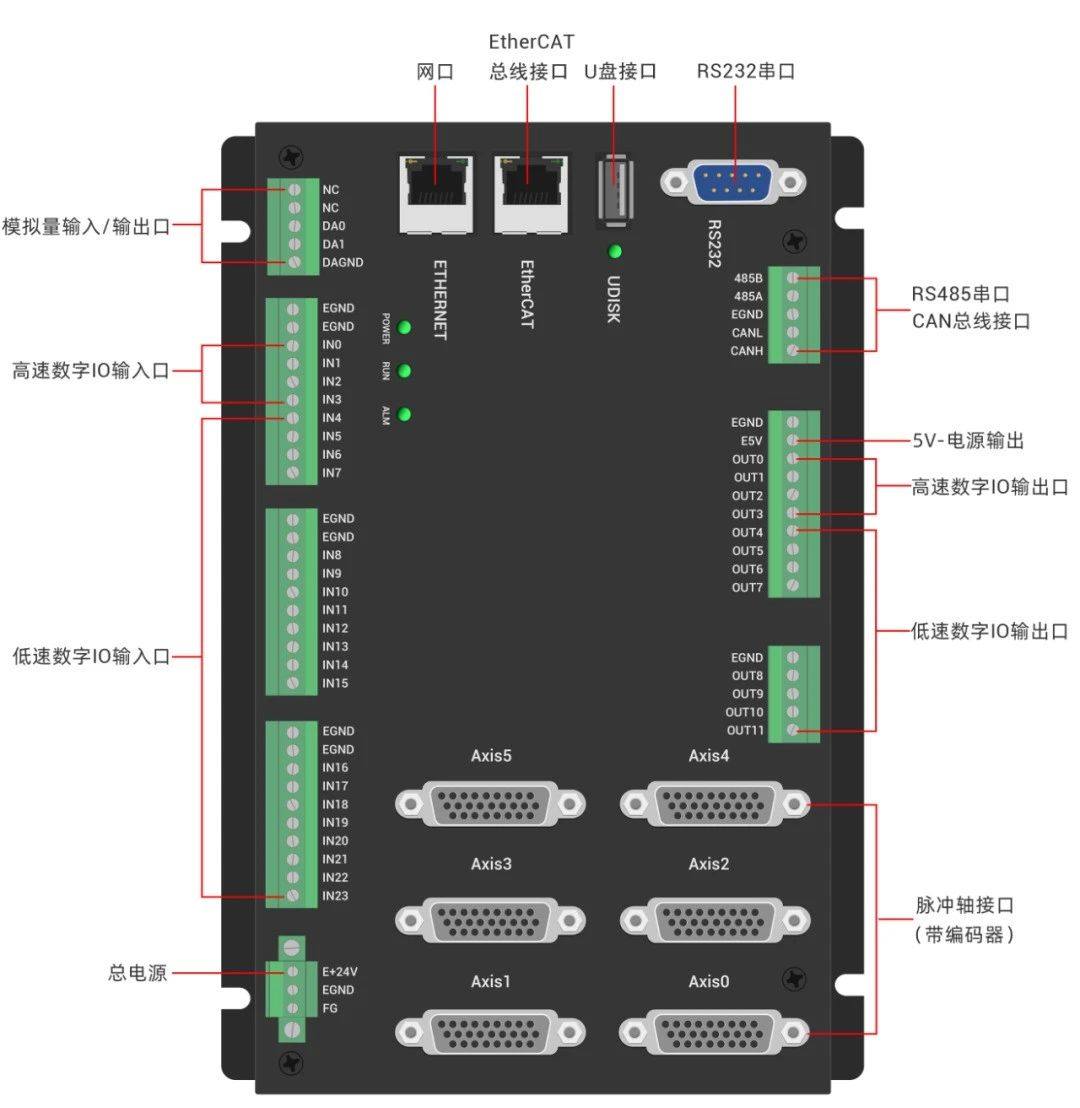
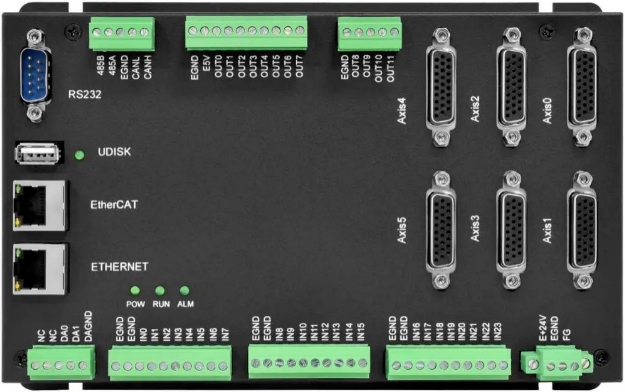
(1)硬件功能特性:
可选6-32轴运动控制,支持EtherCAT总线轴、单端脉冲轴、差分脉冲轴、单端编码器轴和差分编码器接口;
24路通用数字量输入+6路轴接口内置数字量输入,12路通用数字量输出+6路轴接口内置数字量输出;数字量输入/输出最多可扩展至4096路;
2路模拟量输出DA;模拟量输出DA最多可扩展至512路;
硬件比较输出PSO、高速锁存、PWM、30+机械手控制、连续插补、轨迹前瞻等功能;
支持RS232、RS485、CAN总线以及EtherNET网口等通讯接口。
(2)产品优势一览:
1.强大的32轴同步控制
支持多达32轴的同步运动控制,满足复杂多轴联动的工业应用需求,如光电子耦合设备,精密机械加工、电子封装设备、半导体封装&测试等领域。
2.支持EtherCAT运动控制与6个脉冲闭环的运动控制
兼容主流工业EtherCAT总线控制网络协议,实现高速、稳定的数据传输,简化系统布线,灵活扩展轴数。也支持EtherCAT运动控制与6个脉冲闭环的运动控制的同时运动。
3.高速脉冲输出、I/O控制和模拟量DA控制
支持高速脉冲输出,满足高速、高精度的运动控制需求。提供丰富的数字IO和模拟DA接口,方便与各种传感器和执行器集成。
4.支持使用现成的API二次开发各种装备
支持多种编程语言,方便用户进行二次开发,快速实现定制化功能。

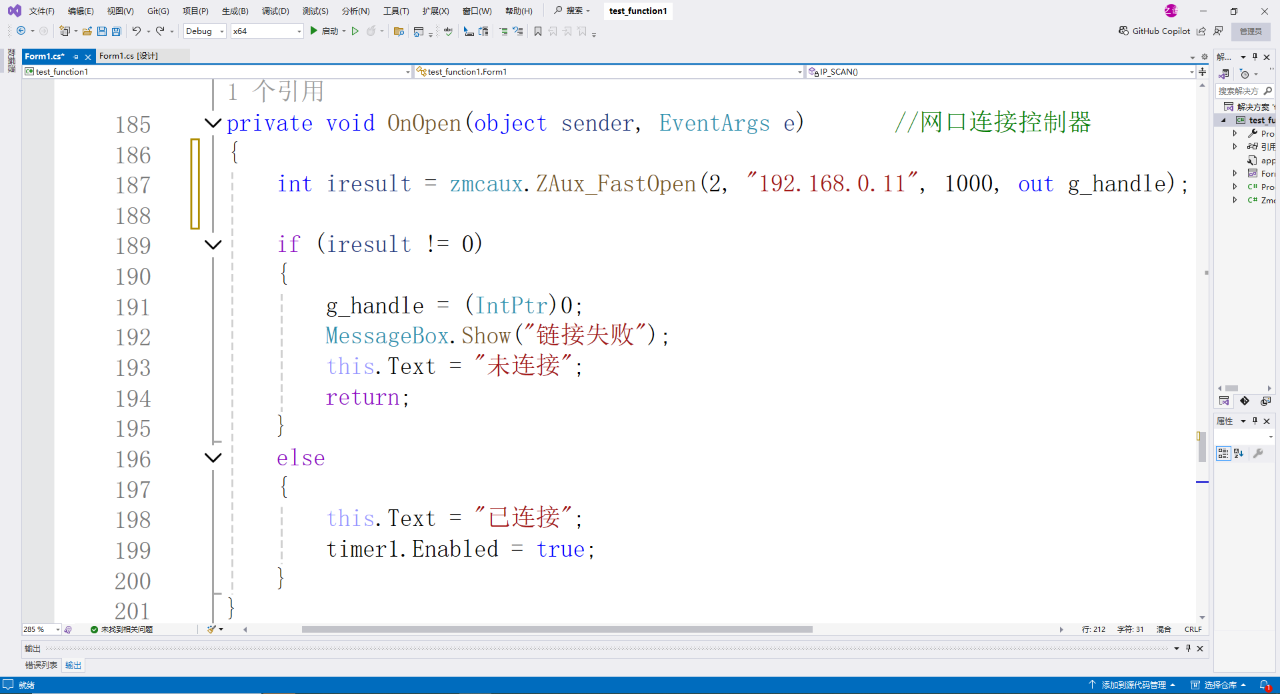
C#开发
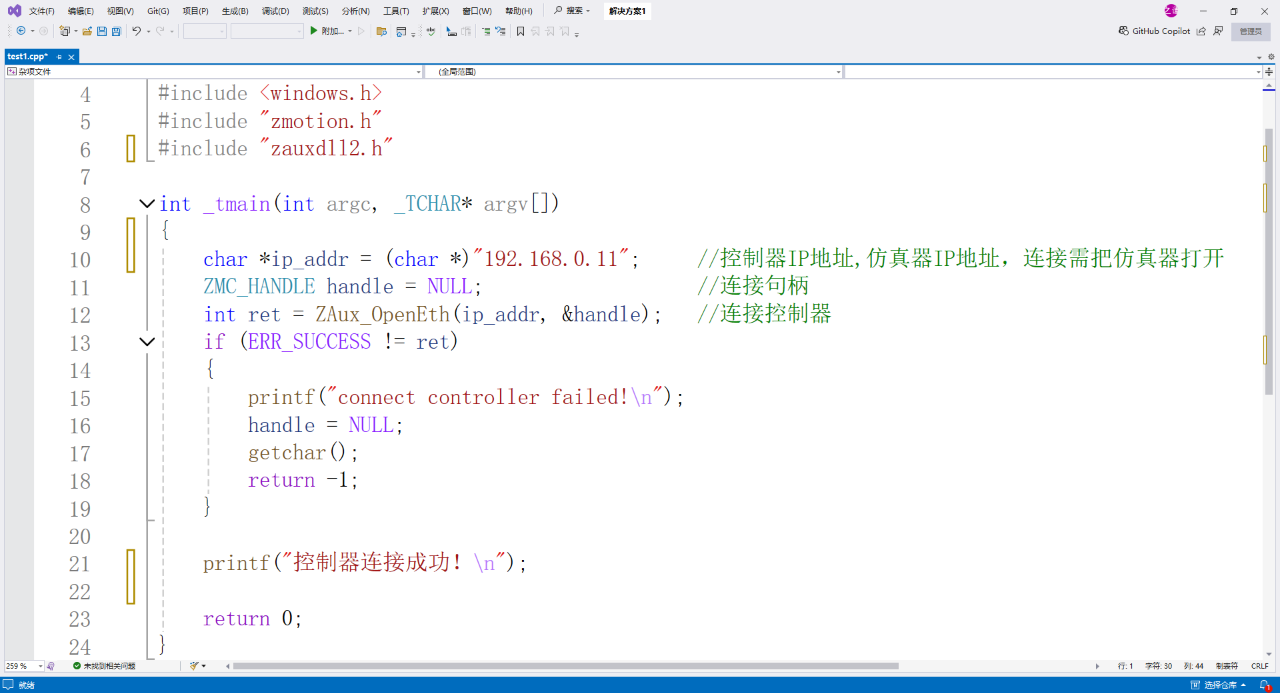
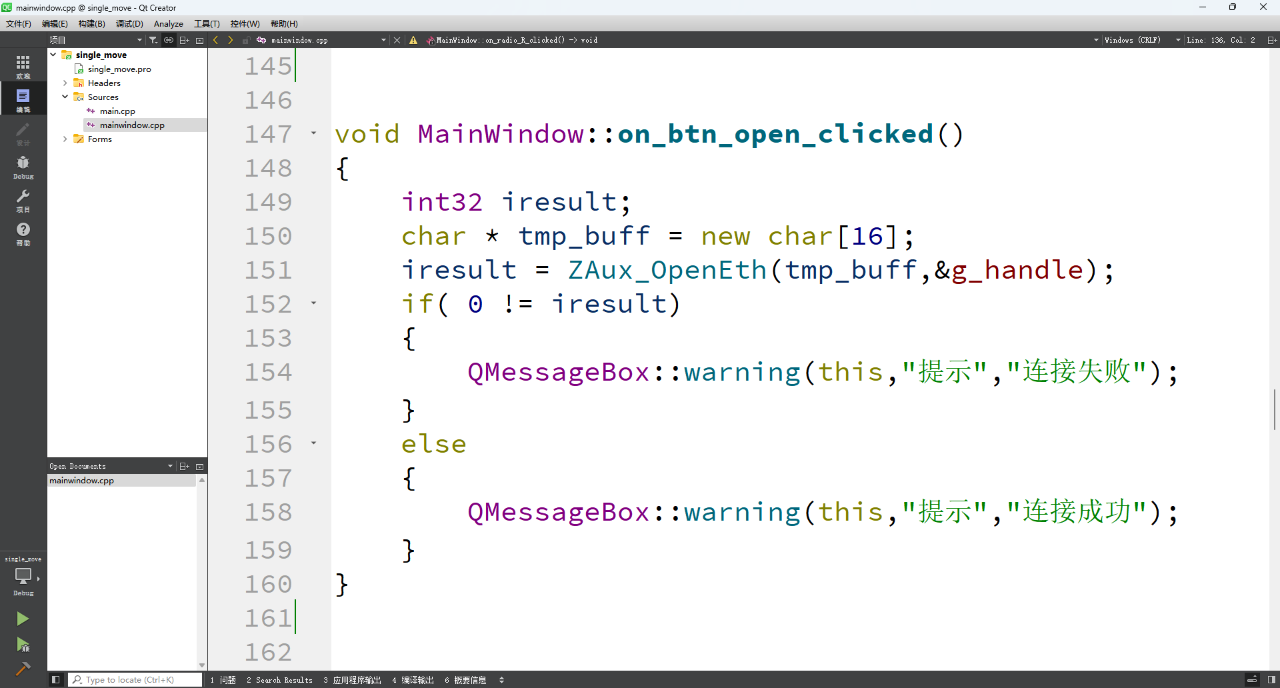
C++开发
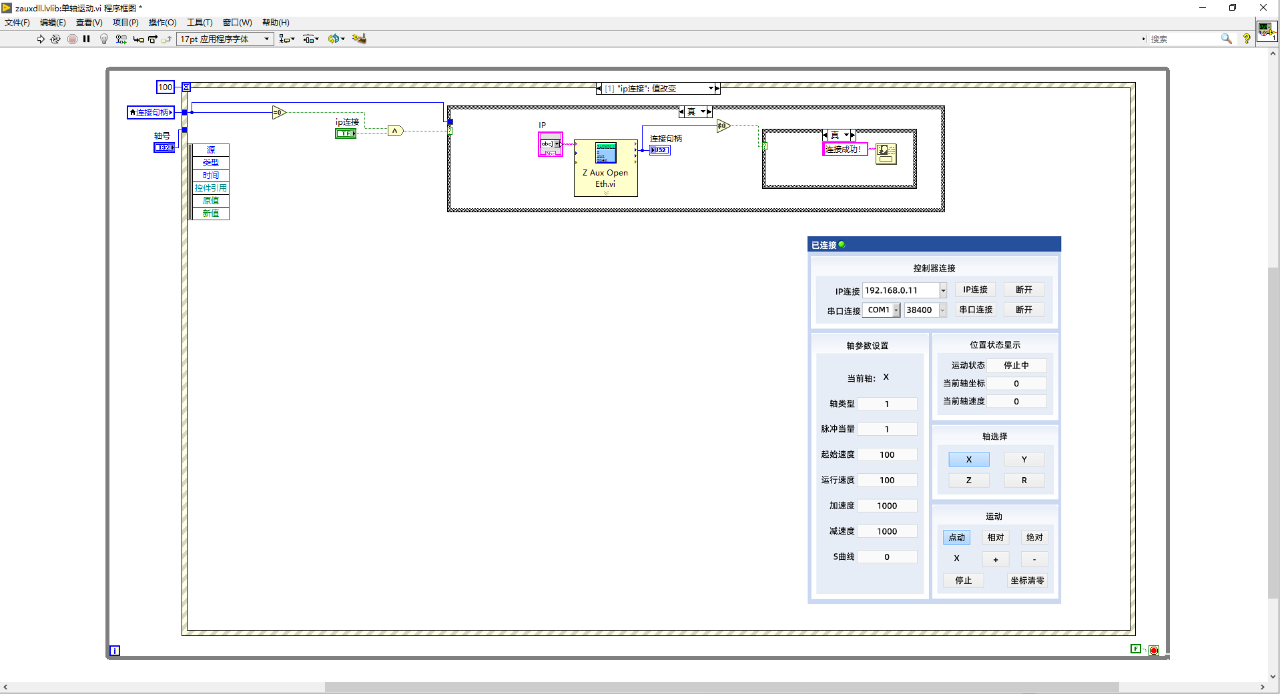
LabVIEW开发
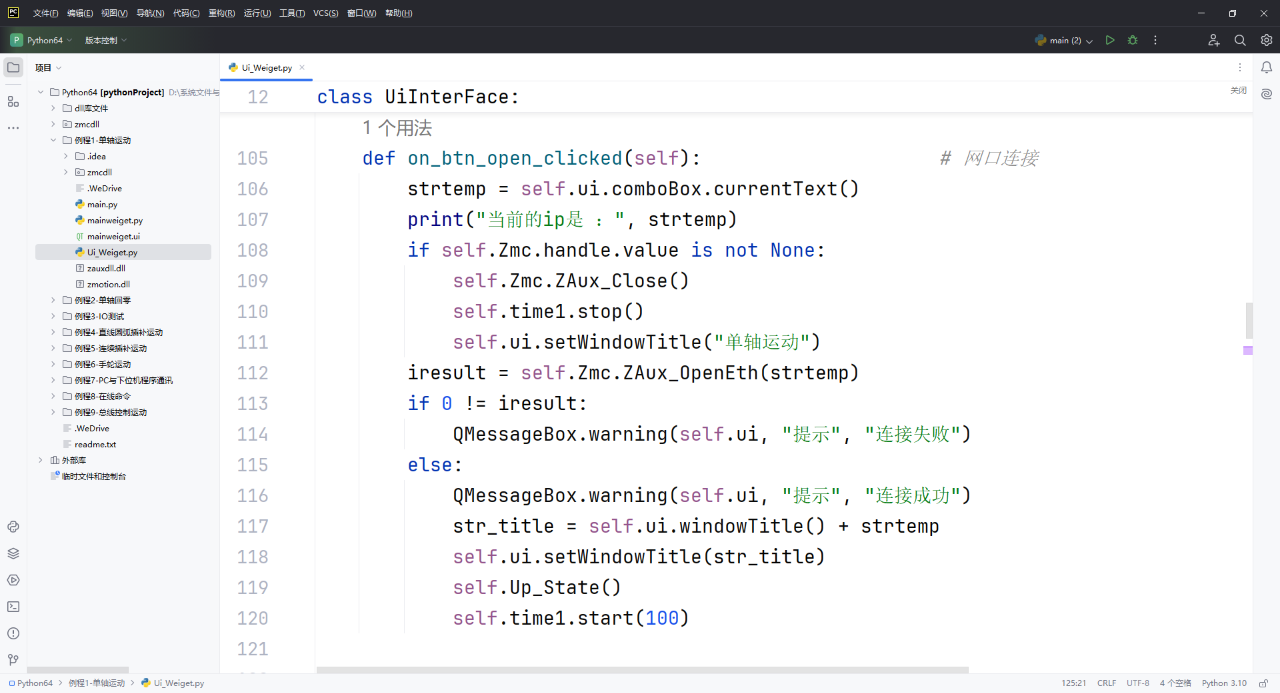
Python开发
QT开发
5.支持纯国产IDE开发环境RTSys进行项目开发
通过纯国产IDE开发环境RTSys进行项目开发,可实时仿真、在线跟踪以及诊断与调试,简便易用,支持多种高级上位机语言联合编程进行二次开发。
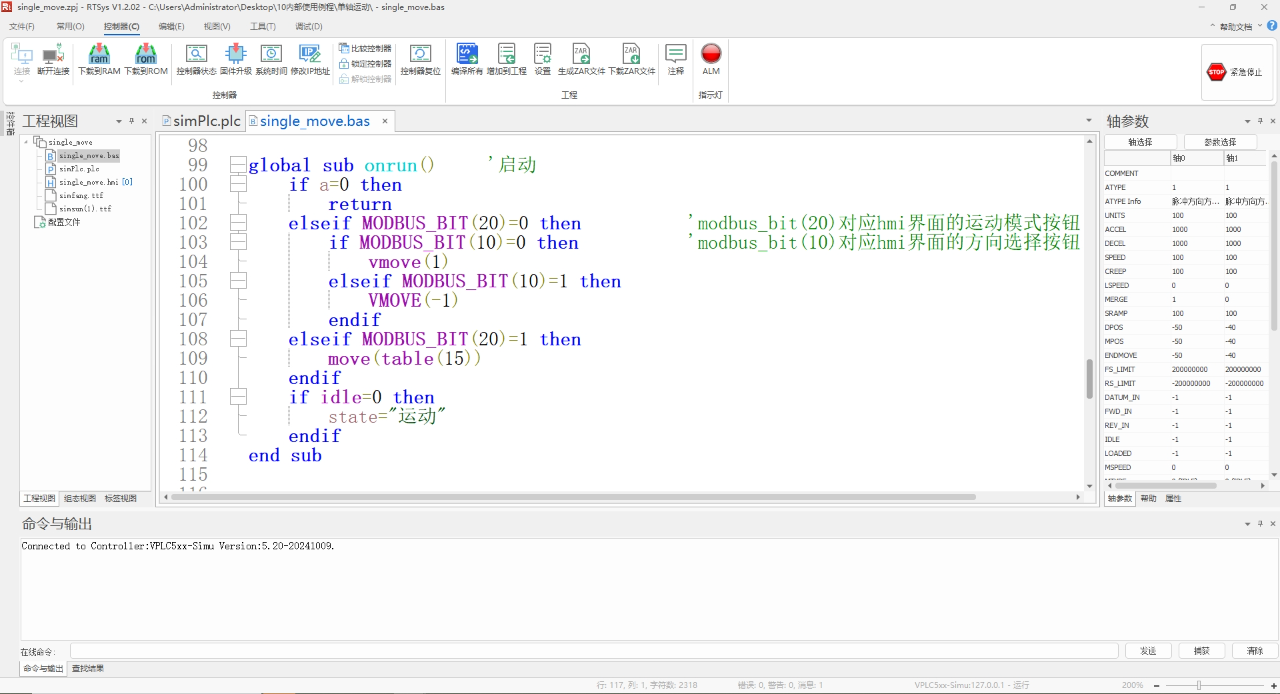
RTBasic界面
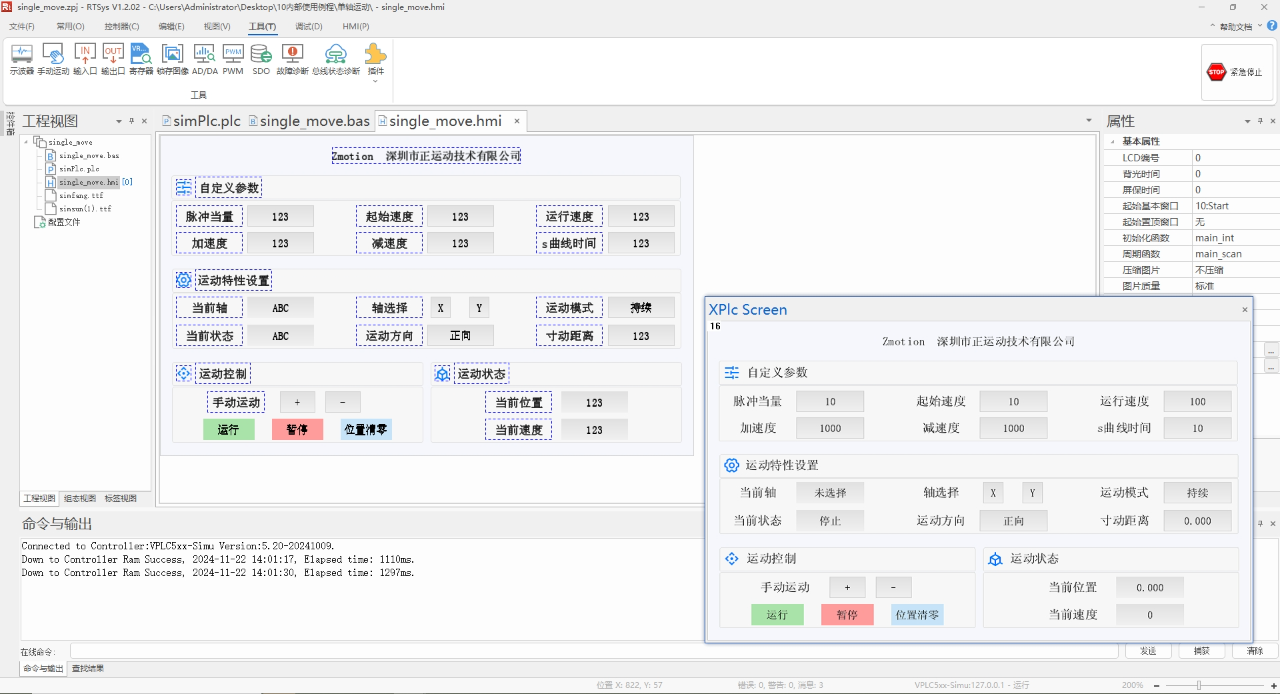
RTHmi界面
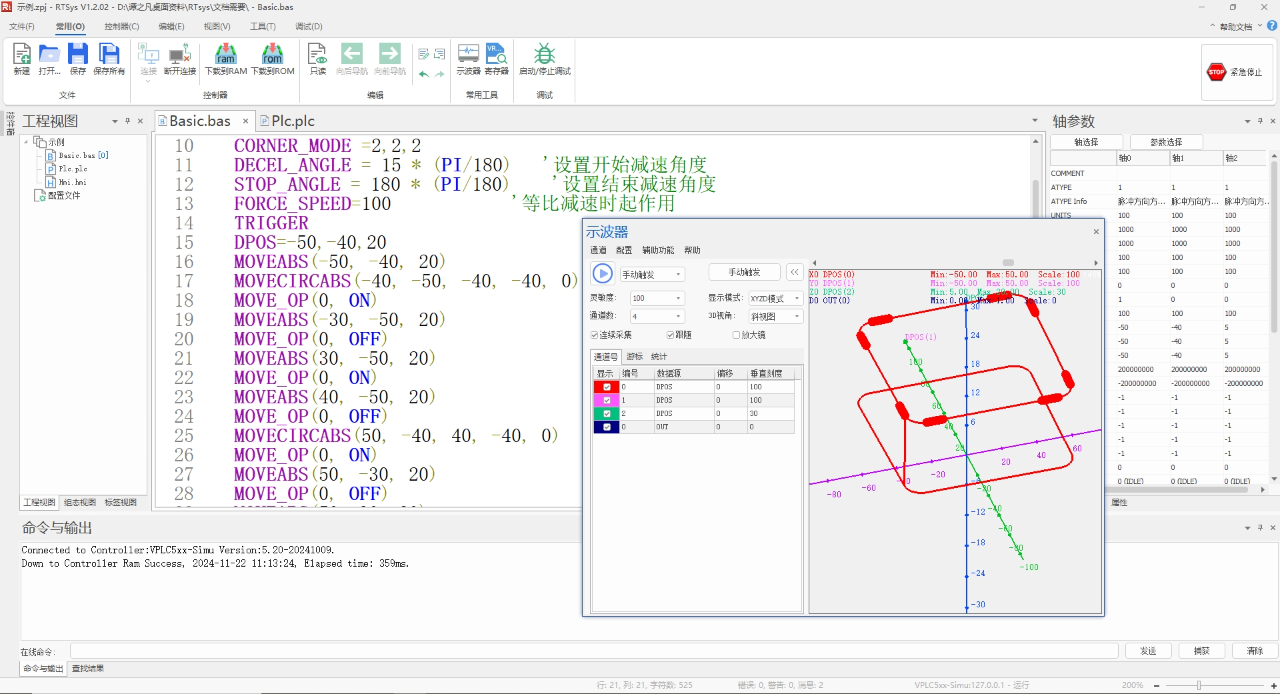
示波器界面
(3)核心功能介绍:
1、高精度PSO,等间距输出
2、PWM,模拟量与速度同步输出
3、高速锁存输入
4、速度自适应前瞻

03ZMC432CL-V2市场应用
摒弃传统开环控制对设备性能的束缚!选择ZMC432CL-V2,采用高精度光栅尺的脉冲全闭环,消除传动误差,改善步进系统的亚微米级加工性能!
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。
审核编辑 黄宇
-
运动控制器
+关注
关注
2文章
494浏览量
26156 -
运动控制
+关注
关注
5文章
840浏览量
34690 -
运动控制系统
+关注
关注
0文章
97浏览量
14645 -
EtherCAT总线
+关注
关注
5文章
98浏览量
5985 -
正运动技术
+关注
关注
0文章
138浏览量
914
发布评论请先 登录
ZMC900E运动控制器单路EtherCAT主站125μs性能实测:硬核实力筑牢高精度控制基石

步进驱动为什么要采⽤外置光栅尺?


不懂底层协议?ZMC系列主站控制器让你轻松驾驭EtherCAT

如何预防RE74光栅尺性能和作用
如何预防RE74光栅尺污染?
如何判断光栅尺是否需要清洁?
RE74光栅尺是什么
探索工业自动化核心:ZMC 系列 EtherCAT 主站控制器

100%器件全国产化认证:ZMC432HG系列EtherCAT运动控制器通过全国产化认证!
步进的光栅尺全闭环EtherCAT运动控制器ZMC432CL-V2(四):LabVIEW编程调试





评论