 爱普生IMU产品在激光雷达测绘中的应用
爱普生IMU产品在激光雷达测绘中的应用

随着雷达应用的快速发展,激光雷达测绘技术也迅速发展,它集成了激光测距系统、全球定位系统(GPS)和惯性导航系统三种技术于一体。其中激光雷达通过发射扫描激光,并检测激光反射,从而测量反射物到激光雷达的距离。在知道自身三维空间坐标系和激光扫描方向的情况下,能够实时获取测量系统周围的高分辨率的三维空间信息。
该技术搭载于无人机上,被广泛应用于电力巡线、地形勘探、矿山测量等领域。
为什么需要惯性测量单元(IMU)
首先,惯性导航系统中一般具有惯性测量单元(IMU),可以用来精确测量出激光雷达自身的姿态数据,从而计算出激光雷达的扫描方向。
其次,在测量过程当中,通常由卫星系统(BDS/GPS/GLONASS/GALILEO)+惯导系统来实现测量激光雷达自身的空间坐标。但是,卫星系统在某些地方没有信号(如隧道),且卫星系统位置信号相对来说是慢速信号,解算位置信息需要更快速的坐标信息更新,因此需要惯性测量单元(IMU)每秒来提供更多位置信息。

惯性测量单元(IMU)对精度的影响
激光雷达测绘设备的指标包含了:系统参数指标,激光雷达单元指标、惯导系统指标等单元。惯性测量单元(IMU)精度决定了姿态和位置精度,因此直接影响系统精度。采用爱普生的M-G370,经过后处理,激光测绘雷达的惯导系统精度可以达到:
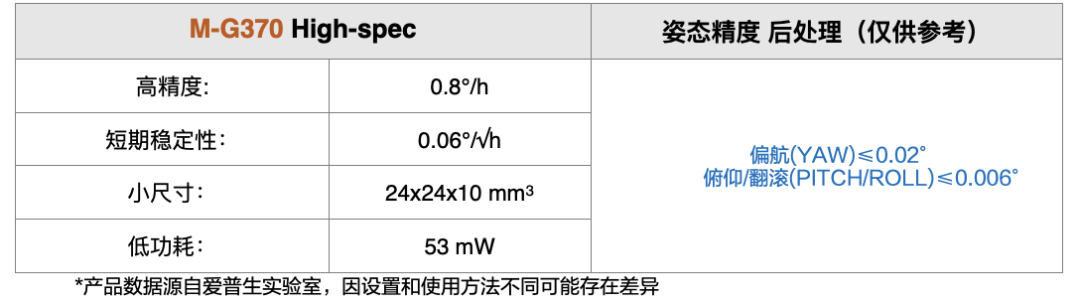
除了高精度,爱普生的惯性测量单元(IMU)还具有体积小、重量轻、功耗低的特点,有助于客户应用的小型化和轻型化的要求;并且产品设计能硬件和软件兼容,性能更稳定,也便于客户维护升级。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
爱普生
+关注
关注
0文章
517浏览量
23811 -
激光雷达
+关注
关注
983文章
4609浏览量
197432 -
IMU
+关注
关注
6文章
438浏览量
48200
发布评论请先 登录
相关推荐
热点推荐
激光雷达在工业检测与测量场景的应用优势
激光雷达在工业检测与测量场景的应用优势在工业检测与测量场景中,激光雷达凭借其独特的技术优势,成为替代传统检测方式、提升测量精度与效率的核心装

为啥自动驾驶不使用1550纳米激光雷达?
[首发于智驾最前沿微信公众号]在自动驾驶传感器的技术路线中,激光雷达的波长选择直接决定了探测距离、分辨率以及成本。目前市场上绝大多数车型采用的是905纳米波长的激光雷达,1550纳米方

万线激光雷达是依托什么技术实现的?
[首发于智驾最前沿微信公众号]在自动驾驶领域,当谈论激光雷达时,线束多少一直是其关键指标,从最初的16线、64线到后来的128线,线数越高,意味着扫描出的点云越密集,看得也越清楚。就在最近,速腾聚创

激光雷达LiDAR技术的工作原理和应用场景
激光雷达(LiDAR,Light Detection and Ranging)是一项成熟的遥感技术,在地表与物体测绘、监测及评估方面极具应用潜力。

实锤!比亚迪首次披露自研激光雷达进度,已量产上车!(将全民普及)
全球第一的新能源汽车企业比亚迪,自研激光雷达来了!已实现量产上车! 此前,市场早已有比亚迪自研激光雷达的传闻,如今,比亚迪官方首次确认自研激光雷达产品的存在。 在3月2

固态激光雷达参数以及避障视频
数量:100pcs。
注 3:激光雷达是精密设备,在使用过程中需要注意防护,在高低温或者强烈振动的使用场景中,相对误 差的参数指标会相对更大
发表于 03-27 14:14
禾赛科技位列全球激光雷达行业专利第一
Landscape Analysis 2025)。KnowMade 指出,禾赛在激光雷达领域的专利数量位居激光雷达行业全球第一,专利综合强度激光雷达行业全球第一、与博世、Waymo

如何解决激光雷达点云中“鬼影”和“膨胀”问题?
[首发于智驾最前沿微信公众号]之前在聊激光雷达点云“鬼影”和“膨胀”的文章中( 相关阅读: 激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?),很多小伙伴都提到一个问题,那就是

纳芯微栅极驱动器NSD2017在激光雷达应用中PCB设计的注意点
驱动能力、支持极窄脉宽输出以及强抗干扰能力的特点。本文从激光雷达的应用特点出发,介绍NSD2017在应用中PCB设计的注意点。

华为,激光雷达第一! 车载激光雷达市场的“隐形冠军”
据国内资讯机构盖世汽车统计,在汽车市场,2025 年 1-8 月激光雷达供应商装机量排行榜显示,中国激光雷达市场呈现显著的头部集中效应,华为、禾赛科技、速腾聚创占据行业TOP 3,三家市场份额总和

南方测绘亮相第九届全国激光雷达大会
9月26-28日,第九届全国激光雷达大会在武汉中国光谷科技会展中心举办。本次大会围绕激光雷达的前沿理论、硬件系统、技术创新、应用示范、行业发展等方面,深度剖析当下行业的难点与热点问题,激发创新

FMCW激光雷达,加速落地工业场景
电子发烧友网综合报道 FMCW激光雷达虽然在车载领域还未实现量产应用,但实际上在工业等领域,比如单点测距场景中已经实现落地。近期激光雷达厂商摩尔芯光正式发布全球首款FMCW球形
SPAD席卷车载激光雷达市场
电子发烧友网报道(文/梁浩斌)上周我们报道了一款新推出的激光雷达ASIC方案,值得关注的是该方案中与ASIC搭配的传感器均选择了SiPM。当然从成本的角度来看,作为第三方的激光雷达ASIC方案
超酷的树莓派激光雷达扫描仪!
摘要这款DIY的PiLiDAR扫描仪项目利用树莓派进行激光雷达测绘。激光雷达通过发射激光来扫描周围环境,从而创建三维模型。该项目需要树莓派4、摄像头、电机以及




评论