 软件算法赋能4D雷达性能提升
软件算法赋能4D雷达性能提升

佐思汽研发布《2024年软件定义汽车雷达行业研究》报告。
软件算法赋能4D雷达性能提升
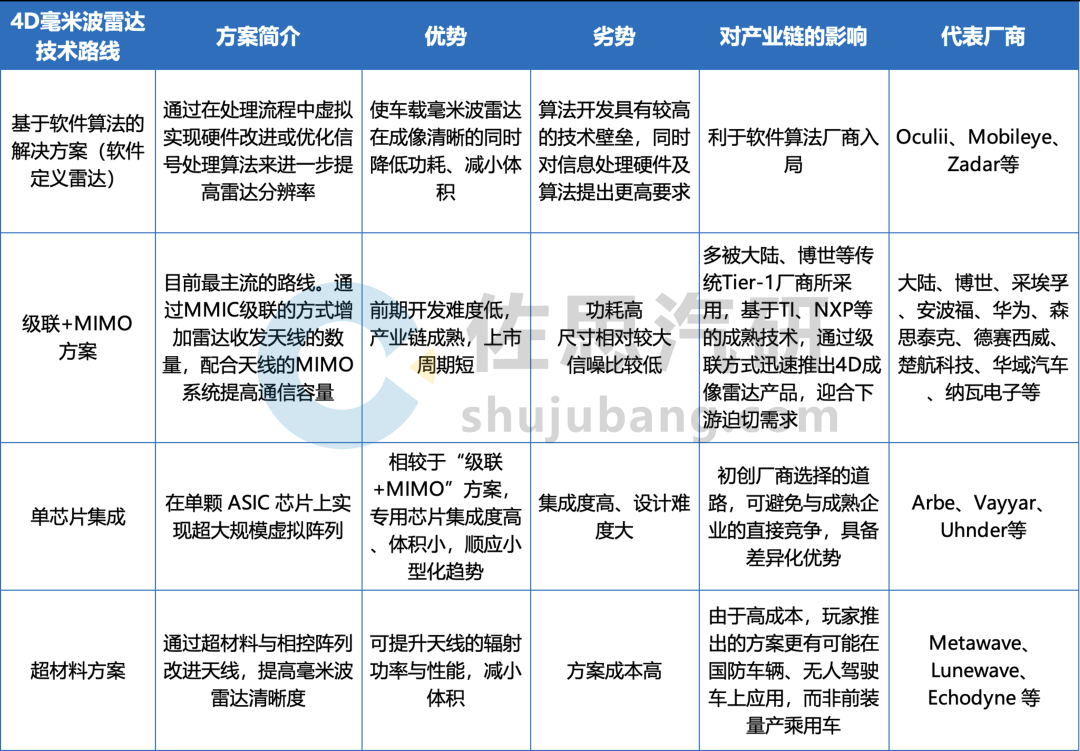
软件定义雷达是一种可通过修改或更新软件来配置和控制雷达工作方式的雷达系统。其中,软件算法不仅作用于处理环节,更直接作用于MIMO(多输入多输出)环节,虚拟出更多信号通道。
软件算法赋能VS硬件提升路线
来源:佐思汽研《2024年软件定义汽车雷达行业研究报告》
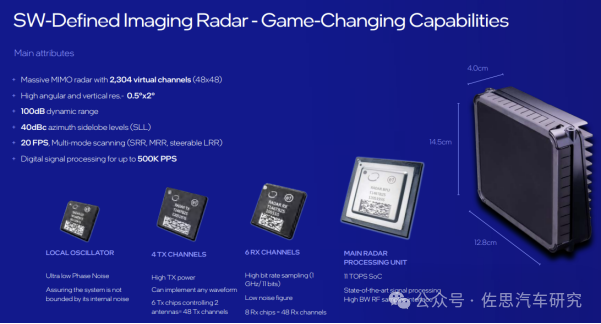
与硬件提升路线相比,软件定义雷达可在不进行任何物理更改的情况下,用算法来提高雷达分辨率。比如Mobileye软件定义成像雷达可通过软件来配置,并通过OTA进行更新,改变它的接收、发射和信号处理等。基于自研SoC+雷达数据算法,Mobileye的成像雷达可提供约304.8米以内细节丰富的4D环境图像,具备100dB的动态范围和0.5°x 2°的角分辨率。在生产上,Mobileye已与启碁科技(WNC)达成合作,预计将于2025年内实现量产。
Mobileye软件定义雷达
来源:Mobileye
2023年11月,NXP对软件初创公司Zendar Inc.投资并展开合作。利用Zendar分布式孔径雷达技术(DAR),开发面向汽车应用的高分辨率雷达系统。该DAR技术通过将车辆上多个雷达传感器的信息进行相干融合,创建一个更大的有效天线孔径,从而实现低于0.5度角度分辨率的高分辨率成像。这一性能可用于精确绘制环境地图,是自动驾驶系统的关键。
Zendar分布式孔径雷达技术(DAR)提供比传统雷达系统高20倍的性能

来源:Zendar
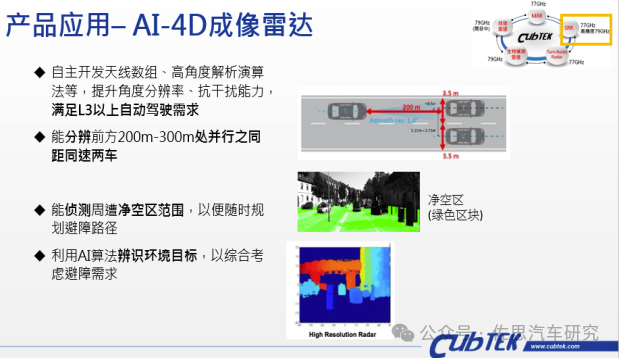
2022年1月,为升科与NXP联手发布最新一代4D成像雷达方案,满足L3级以上自动驾驶感知需求。采用为升科的信号处理算法,不仅实现小于1度的角度分辨率,实现300米测距,20FPS数据速率输出,每秒可生成8万个点云。针对海量数据的处理,为升科也在利用AI技术实现目标分类。
为升科(CubTEK)与NXP合作开发的4D成像雷达
来源:为升科(CubTEK)
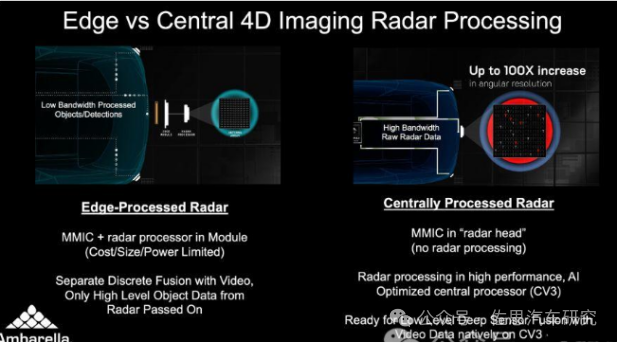
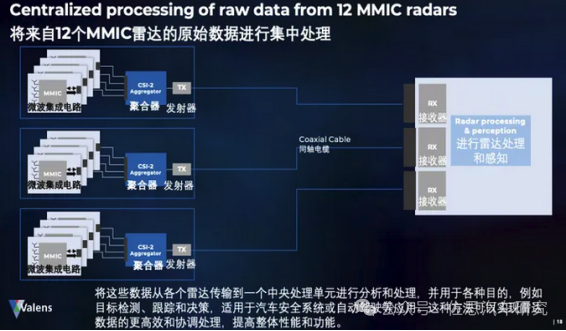
雷达原始数据向集中式处理发展,借助MIPI A-PHY解锁高速率传输
在集中式处理方法下,由于所有传感器的原始数据都在一个中心点进行合并,数据进行融合时不会丢失关键信息。由于不在前端进行处理,毫米波雷达传感器模块大大简化,从而缩小尺寸,降低功耗和成本。
雷达原始数据集中化处理的优势

来源:Valens
比如,安霸于2022年12月发布中央域控4D成像毫米波雷达架构。不仅可以集中处理原始毫米波雷达数据,也可与其它传感器输入,例如摄像头、激光雷达和超声波,进行深入的底层融合。采用傲酷 AI算法创建虚拟天线阵列,使得MMIC(单片微波集成电路)的数量大幅减少,同时实现了极高的0.5度方位角和俯仰角分辨率,且在前端无需接雷达处理器。由于不需要边缘端的雷达处理,避免了信息过滤和传感器信息损失。
安霸中央域控4D成像毫米波雷达
来源:安霸
在朝向上述集中式架构过渡时,需要在整个车辆中实现高速链路:该架构依赖于车辆的以太网骨干网。但一些制造商也在推动MIPI A-PHY作为以太网替代方案。
例如Valens于2023年9月联合韩国Smart Radar System(SRS)公司展示了利用MIPI A-PHY技术实现集中化处理的案例。
MIPI A-PHY是一种标准化的高速传输技术,具备高带宽、低延迟和可靠性等特点。Valens凭借符合A-PHY标准的芯片组VA7000,提供高速、可靠和安全的数据传输解决方案。例如,在处理高带宽原始数据和传输高速数据时,快速SPI作为一种外设设备通信的接口技术,能够实现动态调制信号和快速启动,为数据传输提供高效保障。
通过将MIPI A-PHY技术融入其雷达系统中,Valens使12部MMIC雷达的原始数据能够高效传输到中央处理单元进行分析和处理。这些经过分析和处理的数据适用于汽车安全系统或自动驾驶等应用,例如目标检测、跟踪和决策。
Valens利用MIPI A-PHY技术实现雷达原始数据集中处理

来源:Valens
除Smart Radar System公司外,Intron旗下的一家中国公司G-Pulse也在基于A-PHY,利用Valens的VA7000芯片组系列,创建一种具有集中处理功能的4D毫米波雷达。这种软件定义的雷达能通过UTP线缆运行,可实现低成本和低能耗。
审核编辑:刘清
-
信号处理
+关注
关注
49文章
1160浏览量
105250 -
MIMO
+关注
关注
12文章
612浏览量
79771 -
OTA
+关注
关注
7文章
630浏览量
38443 -
软件算法
+关注
关注
1文章
6浏览量
6936 -
雷达传感器
+关注
关注
3文章
309浏览量
35373
原文标题:软件定义雷达研究:软件算法和集中式处理如何提高雷达整体性能
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
4D毫米波雷达成为L3级自动驾驶的感知基石
4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

德赛西威发布首款支持卫星架构的8T8R 4D毫米波雷达
4D毫米波雷达为什么称为激光雷达的“替身”?
使用单芯片 8 x 8 级联收发器实现 4D 雷达成像
全球体积最小4D FMCW激光雷达亮相!

自动驾驶中4D毫米波雷达在雨雾中更具优势吗?

单芯片8T8R,全国产“4D卫星架构雷达”来了
洛微科技携4D FMCW激光雷达与3D感知方案闪耀光博会,引领行业新趋势

4D毫米波雷达比3D毫米波雷达到底强在哪儿?

恩智浦4D成像雷达如何助力自动驾驶发展
生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践

Litestar 4D:运动场所照明
LITESTAR 4D应用:运动场照明设计流程
黑芝麻智能视觉与4D毫米波雷达前融合算法介绍




评论