 工业相机单目和双目的区别
工业相机单目和双目的区别

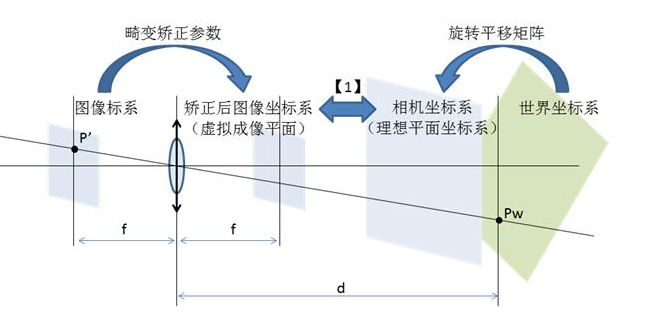
在实际应用中,被测平面的不确定性以及镜头的畸变使我们已经无法简单的使用理想的小孔成像模型计算出实际距离,但是我们可以将目前能够获得的数据进行转换,使这些数据符合理想的小孔成像模型的使用条件。
就是将任意坐标平面通过旋转和平移映射到理想坐标平面上,对有畸变的图像进行校正,让它成为符合小孔成像模型的像平面。有了这种方法,我们只要确定转换算法、校正算法以及参数就可以实现三维空间中任意平面上尺寸与位置的测量。我们将这种确定参数的过程称之为标定。
工业相机标定的目的
工业相机标定的方法根据工业相机的数目可分为单目标定、双目标定Q以及多目标定。
空间物体呈现的是三维几何位置,相机内的投影图像为二维位置,可将理想的成像模型简化为被测平面和像平面平行的小孔成像模型。

实际应用中并非如此。由于受到光学生产工艺的影响,我们常用的工业相机镜头在制造生产后,我们无法严格控制像平面和被测平面的位置,所用的镜头也不是严格的小孔模型,其成像总会呈现或多或少的畸变。
只有在消除畸变的情况下,才能获取准确的映射关系,进一步有利于进行高精度测量和定位,我们需要通过标定来实现坐标平面的转换以及图像的校正。
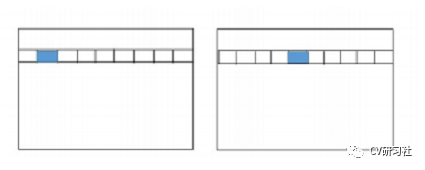
双目相机标定在OpenCV中提供了示例程序,本来是非常简单的事情,但是当标定自己的双目相机的时候却发现同样的程序最后标出的结果却很差劲,直接表现就是最后进行行对齐的时候获得图像根本不能看,所以从新梳理了双目标定的过程,并给出了对双目标定结果的应用,比如在ORB-SLAM中,双目模式是需要进行双目图像矫正和对齐的,这时就可以使用OpenCV提供的函数接口完成这个过程,其过程如图所示:

工业相机单目和双目的区别
工业相机按照其结构特点,主要分为单目相机和双目相机。单目相机和双目相机各有其特点,它们在机器视觉应用中的差异,决定了它们在不同场景下的适用性。
单目相机只有一个镜头,通过这个镜头捕捉场景,形成单一的视觉角度。而双目相机则拥有两个镜头,分别从不同的角度捕捉场景,形成立体视觉。这两种视觉方式在机器视觉应用中各有千秋。
工业相机单目和双目的主要区别体现在以下几个方面:
成像与数据处理:单目工业相机捕获的是二维图像,而双目工业相机则能够获取三维几何位置信息。双目工业相机基于对极几何的理论,通过计算两个相机之间的视差,可以获得场景中物体的深度信息,从而实现三维重建和深度感知。这种深度信息的获取使得双目相机在立体视觉上具有显著优势,能够提供更精确的目标定位、障碍物检测和距离测量等功能。
应用领域:单目相机在一些环境如消费电子领域已经可以满足需求。然而,对于需要进行立体深度计算的场景,双目相机则更为适合。双目相机广泛应用于机器人导航、增强现实、虚拟现实等领域,其模拟人类的双目视觉系统的能力使得拍摄的照片或视频更加逼真、立体。
复杂性:双目相机由于有两个镜头,因此需要进行相机标定和图像配准,使得其相对于单目相机来说更为复杂。
成本:由于双目相机需要两个摄像头,其成本相对于只有一个摄像头的单目相机来说要高。
审核编辑:黄飞
-
摄像头
+关注
关注
61文章
5113浏览量
103470 -
相机镜头
+关注
关注
0文章
22浏览量
9612 -
机器视觉
+关注
关注
165文章
4824浏览量
126462 -
工业相机
+关注
关注
5文章
446浏览量
25882
发布评论请先 登录
视觉方案做ADAS,单目和双目到底有什么差别?

单/双目的测距原理区别
遗传算法的单目相机标定
人脸识别中双目、单目、3D结构光摄像头的区别
人脸识别中双目、单目、3D结构光摄像头之间的区别
一文详细剖析深度相机之双目成像

双目相机标定的原理和方法

单目光波导AR眼镜VS双目光波导智能眼镜

工业相机与智能相机的区别

一文带你了解双目深度相机




评论