 三轴陀螺仪模块怎么使用
三轴陀螺仪模块怎么使用

三轴陀螺仪模块是一种用于测量角速度和方向的传感器,可以在航空航天、汽车、无人机等领域广泛应用。本文将详细介绍三轴陀螺仪模块的原理、使用方法和注意事项。
一、原理介绍
- 陀螺仪原理
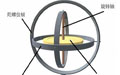
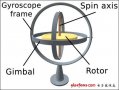
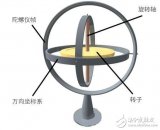
陀螺仪利用角动量守恒定律来测量物体的角速度。当物体发生旋转时,陀螺仪模块会受到一个与旋转角速度成正比的力矩,通过测量这个力矩的大小和方向,可以得到物体的角速度。 - 三轴陀螺仪原理
三轴陀螺仪模块由三个独立的陀螺仪组成,分别测量物体绕X轴、Y轴和Z轴的角速度。通过结合三个方向的角速度测量值,可以得到物体的姿态以及其它与角度相关的信息。
二、使用方法
- 连接电路
将三轴陀螺仪模块与MCU(单片机)或开发板连接。通常,陀螺仪模块的输出信号是模拟电压信号,需要使用模数转换器(ADC)将其转换为数字信号。连接时,确保正确接线,避免引脚连接错误导致测量结果不准确或设备损坏。 - 初始化
在开始使用之前,需要初始化三轴陀螺仪模块。初始化的过程包括设置测量范围、滤波器配置等。具体的初始化方法可以参考陀螺仪模块的使用手册或相关文档。 - 读取数据
通过MCU或开发板的ADC模块读取陀螺仪模块输出的电压信号,并将其转换为角速度数值。读取数据时,应注意采样频率和采样精度的设置,以及数据的单位和坐标系。 - 数据处理
得到角速度数据后,可以进行进一步的处理和分析。常见的处理方法包括滤波、积分计算角度、嵌入式姿态解算算法等。根据具体的应用需求,选择合适的数据处理方法。 - 输出结果
根据处理后的角速度数据,可以得到物体的姿态信息,如俯仰角、横滚角和偏航角等。将结果输出到显示屏、控制设备或通信模块等,以实现相应的功能。
三、注意事项
- 温度校准
陀螺仪模块的测量结果可能会受到温度的影响,因此在使用之前应进行温度校准。一般情况下,温度校准可以通过外部温度传感器和校准算法来实现。 - 坐标系转换
陀螺仪模块的输出结果通常是基于其自身固定坐标系的。如果需要与其他设备进行数据融合或对接,需要将陀螺仪模块的输出结果转换到目标坐标系。 - 滤波处理
由于陀螺仪模块的输出信号可能存在噪声,为了提高数据的准确性,可以对信号进行滤波处理。常见的滤波方法有低通滤波、卡尔曼滤波等,选择合适的滤波方法可以有效地降低噪声。 - 数据校验与修正
在实际应用中,陀螺仪模块的输出结果可能会受到其它因素的干扰,例如振动、重力等。为了保证数据的准确性,需要进行数据校验和修正。可以使用陀螺仪模块自带的校准方法,或者结合其它传感器进行数据融合。 - 功耗考虑
陀螺仪模块在工作时会消耗一定的电能,因此在使用时需要考虑功耗的问题。合理选择工作模式和频率,以降低功耗并延长电池寿命。
结语:
三轴陀螺仪模块作为一种重要的角速度传感器,具有广泛的应用前景。通过合理的连接、初始化、数据处理和输出等操作,可以有效地利用陀螺仪模块来实现姿态测量、运动控制和导航等功能。在使用过程中,要注意温度校准、坐标系转换、滤波处理等问题,以保证数据的准确性和稳定性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6078文章
45589浏览量
673929 -
模块
+关注
关注
7文章
2849浏览量
53458 -
电压信号
+关注
关注
0文章
216浏览量
14226 -
三轴陀螺仪
+关注
关注
2文章
49浏览量
20858
发布评论请先 登录
相关推荐
热点推荐
手机中的三轴陀螺仪
iPhone 4采用了微型的、电子化的振动陀螺仪,也叫微机电陀螺仪。iPhone 4是世界上第一台内置MEMS(微机电系统)三轴陀螺仪的
发表于 04-10 11:33
•8553次阅读
三轴陀螺仪和六轴陀螺仪的区别
(旋转)和skopein(看)两字合为gyro scopei一字来命名这种仪表。 那时常听到别人说三轴、六轴、九轴陀螺仪,那其中到底有哪些
发表于 11-08 16:12
三轴陀螺仪是什么_三轴陀螺仪在手机上的应用
三轴陀螺仪是什么 陀螺仪英文名Gyroscope,是一种用来传感和维持方向的装置设备。陀螺仪是由一个位于轴心且可旋转的轮子构成。
发表于 08-30 11:52
•9330次阅读

三轴陀螺仪工作原理_三轴陀螺仪原理图
则会因为设备改变姿态而跟着改变,通过这样来检测设备当前的状态。 而这三个钢圈所在的轴,也就是我们三轴陀螺仪里面的
发表于 10-26 20:30
•4.9w次阅读






评论