 陀螺仪x和y比例是多少 陀螺仪x轴和y轴是指什么
陀螺仪x和y比例是多少 陀螺仪x轴和y轴是指什么

陀螺仪是一种用于测量和感应物体旋转和转动的设备,它通常由三个轴组成:x轴、y轴和z轴。在陀螺仪中,x轴和y轴通常成对出现,关于它们的比例可以因具体应用而异。
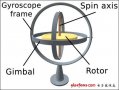
首先,我们先了解一下陀螺仪的工作原理。陀螺仪通过使用惯性传感器(如MEMS)来测量物体的旋转角速度。在x轴和y轴上分别放置两个陀螺仪,可以更全面地捕捉到物体的旋转和转动。
陀螺仪x轴通常与设备的长轴(通常是水平轴)对齐,它测量物体绕x轴旋转的角速度,也就是通常所说的俯仰角。俯仰角指的是物体相对于地平面的上下旋转角度,正值表示向上旋转,负值表示向下旋转。
陀螺仪y轴通常与设备的宽轴(通常是垂直轴)对齐,它测量物体绕y轴旋转的角速度,也就是通常所说的偏航角。偏航角指的是物体相对于水平面的左右旋转角度,正值表示向右旋转,负值表示向左旋转。
陀螺仪x和y的比例是根据具体设备和应用需要来确定的。在某些应用中,x和y的比例可能是1:1,即它们的测量范围和灵敏度相同。而在其他应用中,比例可能会有所不同,以满足不同方向上旋转的测量需求。比例的确定通常需要进行校准和调试,以确保陀螺仪在不同轴上的测量结果准确可靠。
对于一些需要高精度测量旋转和转动的应用,陀螺仪通常会与其他传感器(如加速度计)结合使用。通过综合陀螺仪和加速度计的测量结果,可以获得更准确和可靠的姿态信息。例如,通过结合陀螺仪和加速度计的数据,可以实现对物体的姿态、方向和位置的实时跟踪和测量。
总结起来,陀螺仪的x轴和y轴分别测量物体绕x轴和y轴旋转的角速度,其中x轴通常与设备的长轴对齐,测量俯仰角,y轴通常与设备的宽轴对齐,测量偏航角。x和y的比例根据具体应用和设备需求来确定。最终的测量结果需要综合其他传感器的数据进行处理,以获得更准确和可靠的姿态信息。
-
传感器
+关注
关注
2578文章
55516浏览量
793987 -
陀螺仪
+关注
关注
44文章
897浏览量
102117 -
惯性传感器
+关注
关注
2文章
196浏览量
29633
发布评论请先 登录
手机中的三轴陀螺仪
三轴陀螺仪是什么_三轴陀螺仪在手机上的应用
三轴陀螺仪有什么用_三轴陀螺仪的作用

三轴陀螺仪工作原理_三轴陀螺仪原理图

MEMS陀螺仪技术原理_三轴陀螺仪技术原理




评论