 传感器在自动驾驶中的应用
传感器在自动驾驶中的应用

OmdiaOmdia要点
信息感知是实现自动驾驶算法的基础和源泉。对周围环境做出全面地识别和判断是保证智能汽车安全行驶的前提条件。目前,摄像头、毫米波雷达、超声波雷达和激光雷达都是自动驾驶领域常用的传感器。传感器技术的发展和进步,对于车辆在复杂驾驶环境中感知能力的提升至关重要。
摄像头
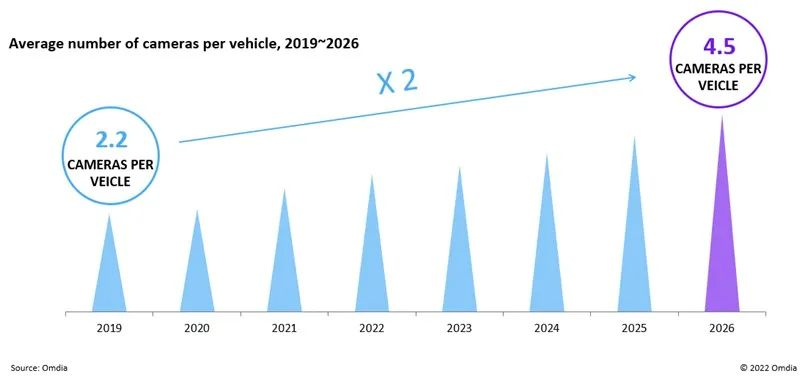
摄像头是当今智能汽车最不可或缺的传感器。它的分辨率高,通过深度神经网络学习进行模型标定、目标跟踪和障碍物识别,可用于车外的道路环境感知和车内驾驶员和乘客的监控。汽车制造商们广泛使用视觉感知方案来实现Level 2及以上的辅助驾驶功能,如前方碰撞警告(FCW)、车道偏离警告(LDW)、自适应巡航控制(ACC)和自主紧急制动(AEB)等。近些年,ADAS(高级辅助驾驶)装机率的提高带动了单车搭载的摄像头的数目不断增加。例如,特斯拉为其自动驾驶硬件系统配备了8个摄像头,蔚来的ET7安装了11个摄像头之多。2019年,全球每部汽车安装的摄像头数目平均只有2.2个,但Omdia预计到2026年这个数字将翻倍。
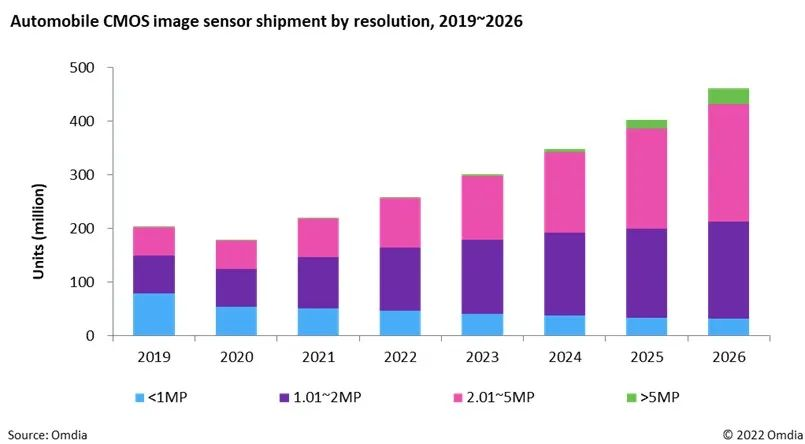
随着摄像头使用数量的增加,对摄像头性能的要求也在提高。采用更分辨率的摄像头是市场的趋势,例如蔚来et7智能驾驶搭载11个800万像素摄像头。在高对比度的场景中,摄像头传感器芯片需要更高的动态范围来捕捉优质的图像。具有较高帧率的车载摄像头能提供更流畅的视频画面。传感器芯片的全局快门技术有助于避免高速运动中图像的 "果冻效应"。此外,汽车摄像头有一些独特的要求,如LED闪烁抑制技术,以确保汽车能正确识别LED信号。随着自动驾驶技术的不断深入,车载摄像头还需要对环境的深度信息进行感测。例如驾驶员疲劳监测功能,以及通过人脸识别确定驾驶员身份等功能。因此3D感测技术如ToF等方案将越来越受到市场的关注。
毫米波雷达
毫米波雷达是一种利用毫米波来探测障碍物距离的设备。按照探测距离来分,毫米波雷达可以分为短程雷达(SRR),中程雷达(MRR)以及远程雷达(LRR)。随着自动驾驶水平的不断提高,毫米波雷达因其成本优势和稳定的工作性能,将被广泛应用于Level 2及以上自动驾驶车辆。它可以全天候工作,是摄像头的必要补充。
毫米波雷达正朝着体积更小、精度更高、探测距离更远的方向发展。由于法规对自动驾驶的安全性要求不断提高,24GHz毫米波雷达将逐渐被77GHz的产品取代,因为更高的频率意味着更高的性能、更宽的带宽和更好的分辨率。
Omdia预计在Level 3及以上的自动驾驶系统中将平均配备5~8个毫米波雷达,以实现盲点检测(BSD)、变道辅助(LCA)和后方碰撞警告(RCA)等功能。
超声波雷达
超声波是传统汽车最常用的传感器之一。它是一种利用发射、接收和处理超声波信号并获得目标的距离和位置等信息的装置。超声波传感器在恶劣的天气条件下,如雾、雨、雪和弱光条件下表现良好,而且价格相对便宜。因此,它被广泛用于倒车雷达和自动泊车系统。
超声波雷达的缺点包括反应时间长,视野有限,精度较低。此外,超声波传感器很难探测到小型、快速移动的物体或多个物体。Omdia认为从长远来看,在较高级自动驾驶汽车中,部分车用超声波雷达将被性能更好的毫米波雷达取代。
激光雷达
激光雷达是一种发射激光束并接收回波以获得目标的三维和速度信息的系统。激光雷达跟摄像头相比探测距离更远,跟毫米波雷达相比对静态目标的识别更准确,因此被认为是Level 3及以上自动驾驶系统最重要的传感器。然而,激光雷达在大雨或大雾天气中可能会失效。另外,由于其成本较高,现阶段配备激光雷达的车辆仍将以高端车型为主。
从技术趋势来看,目前半固态式激光雷达解决方案的成熟度较高,易于通过车辆法规,因此成为市场主流选择。未来激光雷达将朝着小型化、高分辨率(64通道、128通道,甚至200通道等)和低成本的固态式解决方案发展。此外,将激光雷达集成到单个芯片的方案将成为长期的技术研发方向。
一直以来,特斯拉凭借其算法优势和数据储备推崇“纯视觉”感知方案,不使用激光雷达。但其最新的自动驾驶硬件HW4.0中加入了4D毫米波雷达。4D毫米波雷达能够实现四个维度(3D+高度)的信息感知,且成本低于激光雷达,未来有望代替短距激光雷达,助力高阶自动驾驶的进一步渗透。
由于每种类型的传感器都有其局限性,无法提供车辆周围环境的全部信息,因此对传感器融合技术的需求日益增加。传感器融合技术是指将各种传感器(如毫米波雷达、摄像头、激光雷达或超声波雷达等)获取的信息融合起来,综合分析做决策,以便得到一个更为完整可靠的环境描述,从而提升自动驾驶决策的信心度。
Omdia认为,在未来几十年里,随着智能汽车取代传统燃油车的进程加快,对各种类型传感器的需求将进一步放大。而自动驾驶的推进也将促进传感器技术持续创新,推动传感器性能达到更高的水平。
文章来源:Omdia
审核编辑 黄宇
-
传感器
+关注
关注
2577文章
55505浏览量
793963 -
智能汽车
+关注
关注
30文章
3314浏览量
109685 -
超声波雷达
+关注
关注
1文章
79浏览量
4869
发布评论请先 登录
如何设计自动驾驶传感器失效检测与容错策略?
自动驾驶汽车中传感器用得越多就越好吗?

超声波传感器线圈:自动驾驶实现精确实时近距离感知的关键
如何处理自动驾驶感知传感器脏污问题?

激光雷达传感器在自动驾驶中的作用
相机传感器物理建模中的畸变设计

太阳光模拟器 | 在汽车自动驾驶开发中的应用

什么是自动驾驶数据标注?如何好做数据标注?

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证

自动驾驶汽车如何正确进行道路识别?

自动驾驶汽车是如何准确定位的?

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

自动驾驶技术落地前为什么要先测试?
激光雷达在自动驾驶领域中的优势




评论