 从概念到生产的自动驾驶软件在环(SiL)测试解决方案
从概念到生产的自动驾驶软件在环(SiL)测试解决方案

来源:雅名特自动驾驶 虹科方案| 从概念到生产的自动驾驶软件在环(SiL)测试解决方案
自动驾驶软件在环( SiL )测试解决方案
自动驾驶软件在环(SiL)测试解决方案能够研究和验证高历程实验和恶劣驾驶环境下的AD系统的性能,支持云端和PC端操作, 提供高保真度的仿真环境和传感器模型,实现测试可重复和灵活扩展测试场景 ,显著降低AD系统开发成本。
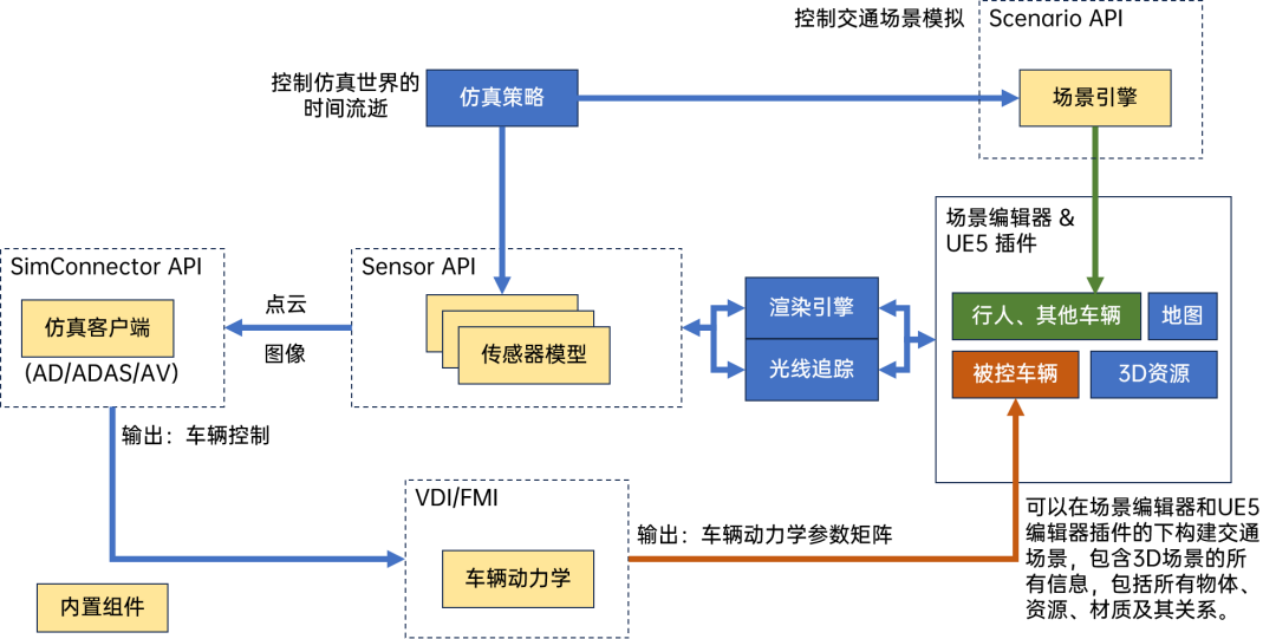
仿真策略
定义仿真客户端如何运行,影响仿真中时间的流逝,提供固定时间步长和实时两种方式。
- 对车辆发出控制命令,评估收到命令后的车辆反应和环境中的要素变化
- 评估仿真世界的信息更新: 计算车辆位置;控制其他元素的位置
- 传感器捕捉仿真世界更新的信息
- 传感器将信息发送至内置组件
内置组件
将 AD/ADAS/AV 软件集成到虹科aiSim自动驾驶仿真模拟工具中,通过 TCP/IP 通信实现客户端-服务器关系。
Scenario API
aiSim 仿真模拟工具提供的场景编辑器能够在安全的虚拟环境中验证 ADAS/AD 系统的功能,根据不同的测试案例调整条件,还可以提供API给客户开发和使用第三方应用程序控制场景中的元素,包括车辆、行人和其他障碍物等。 aiSim-Unreal Editor 预配置插件支持场景定制内容开发,内置多种资源 :
· 地图编辑
· 资源创建、导入和编辑
· 行人模型和动画
· 丰富车辆模型
车辆动力学
aiSim 仿真模拟工具内置车辆动力学模型,同时提供车辆动力学API和功能模型单元。 车辆动力学模型基于广泛的车辆动力学参数 :
· OEM
· 现有参数计算
· 工程文献
传感器仿真
传感器仿真对于实现自动驾驶端到端的测试至关重要,aiSim 引擎在测试过程中 提供高保真的传感器模型,能够生成全面的仿真条件并实现环境交互 。
如您对软件在环测试解决方案感兴趣,
欢迎联系我们了解更多信息。
期待与您的交流!
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
软件
+关注
关注
69文章
5368浏览量
91981 -
自动驾驶
+关注
关注
795文章
15026浏览量
181781
发布评论请先 登录
相关推荐
热点推荐


Elektrobit与Mobileye合作打造自动驾驶解决方案
自动驾驶系统。作为面向全球OEM及robotaxi运营商的基础平台,Mobileye Drive将采用符合功能安全标准的Elektrobit解决方案,提供车规级能力及持续的软件更新支持。此次合作反映了
aiSim领衔!国内外自动驾驶仿真软件大全:热门推荐与选择指南
在自动驾驶技术飞速发展的今天,仿真测试已成为自动驾驶算法研发、验证的核心环节,能够大幅降低路测成本、突破场景复现限制,据行业数据显示,约90%的自动
自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案
1 自动驾驶数据采集的时间同步挑战与重要性 随着自动驾驶技术的快速发展,车辆准确感知周围环境的能力变得至关重要。在分布式多传感器系统中,信号从创建到存储会历经多个

自动驾驶仿真测试有什么具体要求?
[首发于智驾最前沿微信公众号]在自动驾驶技术快速迭代、功能边界不断扩展的今天,如何系统、严谨且高效地验证一个自动驾驶系统的性能,成为研发、测试与监管共同面对的核心难题。相较于传统汽车主

边聊安全 | 以L3级自动驾驶为例,详解DDT、DDT Fallback、MRC、MRM概念
以L3级自动驾驶为例,详解DDT、DDTFallback、MRC、MRM概念写在前面:在自动驾驶技术迅猛发展的今天,动态驾驶任务(DDT)及

汽车软件安全测试中的痛点与Bugspot解决方案
上海磐时PANSHI“磐时,做汽车企业的安全智库”汽车软件安全测试中的痛点与Bugspot解决方案日前在汽车行业,软件正在重新定义
自动驾驶中常提的硬件在环是个啥?
(Hardware-in-the-Loop,简称HIL),就是一种用于复杂系统测试与验证的重要仿真技术。在自动驾驶领域,“硬件在环”被广泛使
低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?
到我们生活的方方面面。与面向开放道路、高速巡航的乘用车自动驾驶系统相比,低速小车在技术实现、系统架构、硬件配置、软件算法及安全冗余等方面都存在显著差异和针对性优化。 从感知需求方面相比

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?
[首发于智驾最前沿微信公众号]自动驾驶技术的发展,让组合辅助驾驶得到大量应用,但现在对于自动驾驶技术的宣传,普遍是在乘用车领域,而对于卡车、矿车的自

自动驾驶技术测试有哪些?
[首发于智驾最前沿微信公众号]之前和大家从安全性、可靠性、用户体验以及商业利益保护等多个角度聊了为什么自动驾驶技术在落地前一定要进行测试,今天智驾最前沿就继续带大家聊一聊

搭建完整的ADAS测试链路,推动自动驾驶技术的安全发展
随着全球L3级自动驾驶法规落地,产业进入规模化发展阶段。针对高阶自动驾驶系统复杂度与测试效率的挑战,北汇信息构建覆盖MIL、SIL、HIL、VIL及实车的全生命周期
萝卜快跑在香港的自动驾驶测试区域再扩大
香港特别行政区运输署根据《道路交通(自动驾驶车辆)规例》更新自动驾驶车辆试行牌照,并扩展北大屿山自动驾驶车辆测试路线。萝卜快跑在港
新能源车软件单元测试深度解析:自动驾驶系统视角
。
自动驾驶软件的特殊性
感知层: 激光雷达、摄像头等传感器数据处理算法的单元测试需覆盖极端场景。例如,激光雷达点云滤波算法在雨雪天气下的噪声抑制能力需通过边界
发表于 05-12 15:59



评论