 RGBD相机的标定和图像配准
RGBD相机的标定和图像配准

1
kinect2相机简介
1、三种主要相机类型

2、常见的RGB-D相机

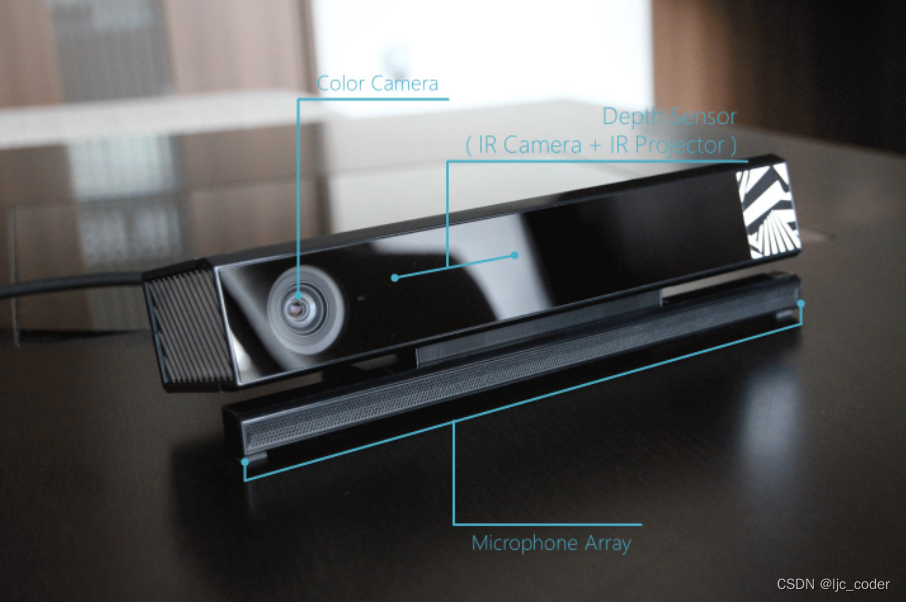
3、kinect2 相机
从左到右依次是:彩色摄像头;红外摄像头(深度摄像头),但这个要和再右边的IR Project(红外投射器)一起工作的;底下的长条是麦克风,可以感受到说话人的方向
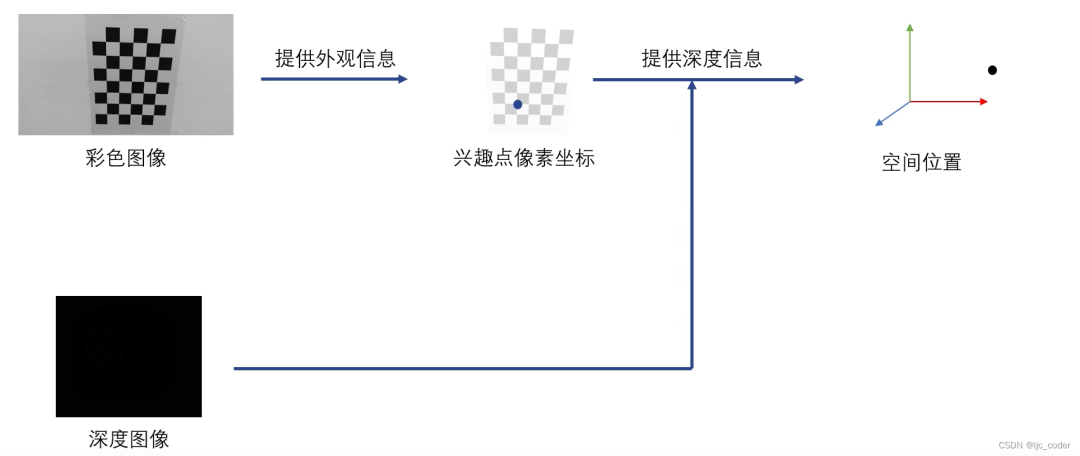
3.1使用RGB-D相机的好处
可以直接通过拍摄的深度图得到物体的空间位置
3.2问题
keinect相机 彩色图像是1920x1080的,但深度图是512x414的,因此需要深度校准
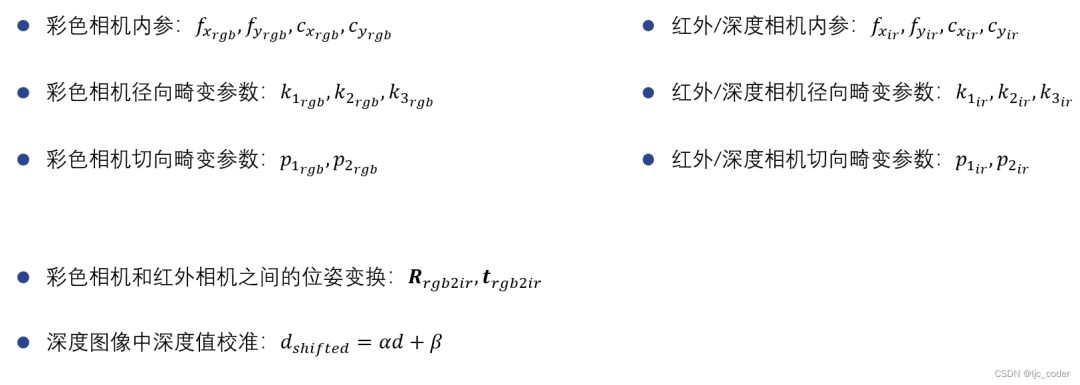
3.3实际标定得到的数据
2
内外参标定
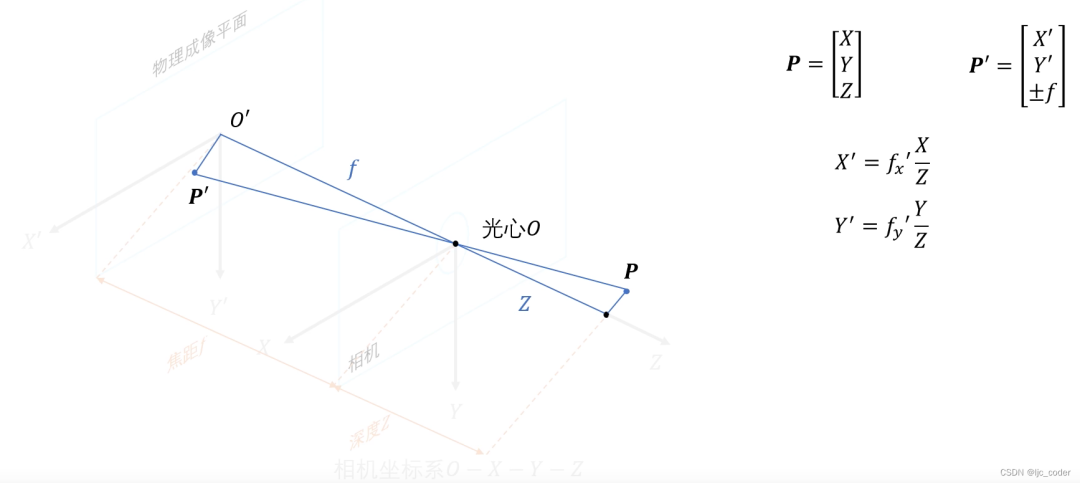
1、针孔相机投影模型
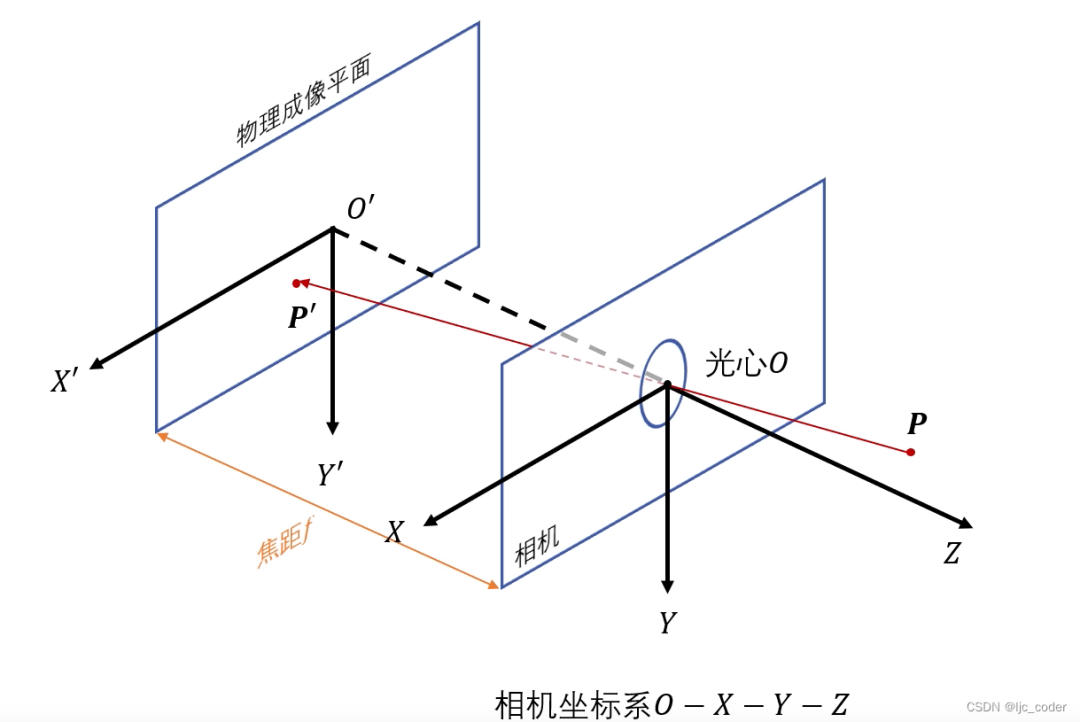
相机坐标系 -> 物理成像平面
物理成像平面 -> 像素平面
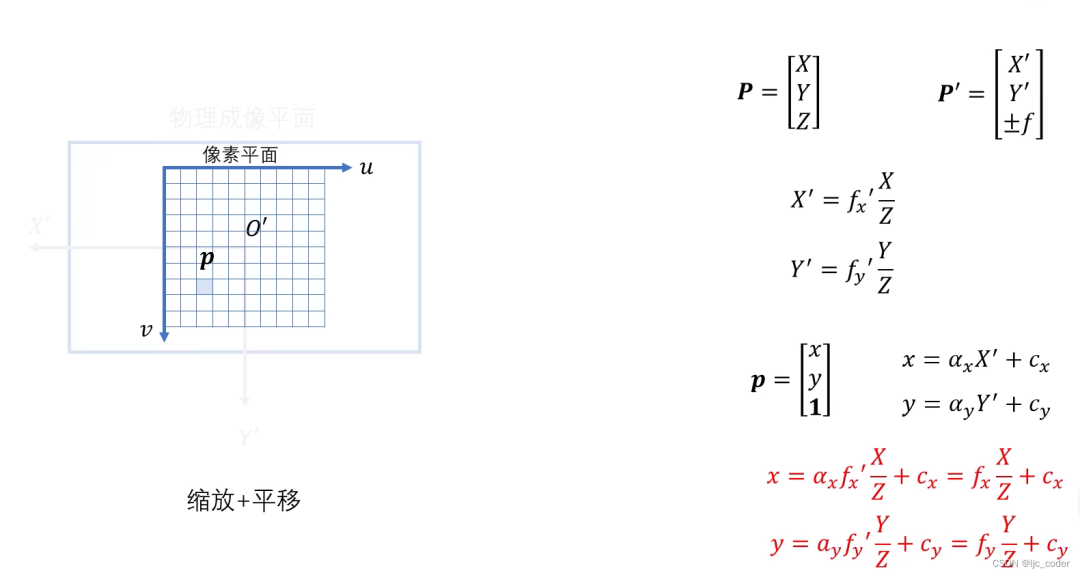
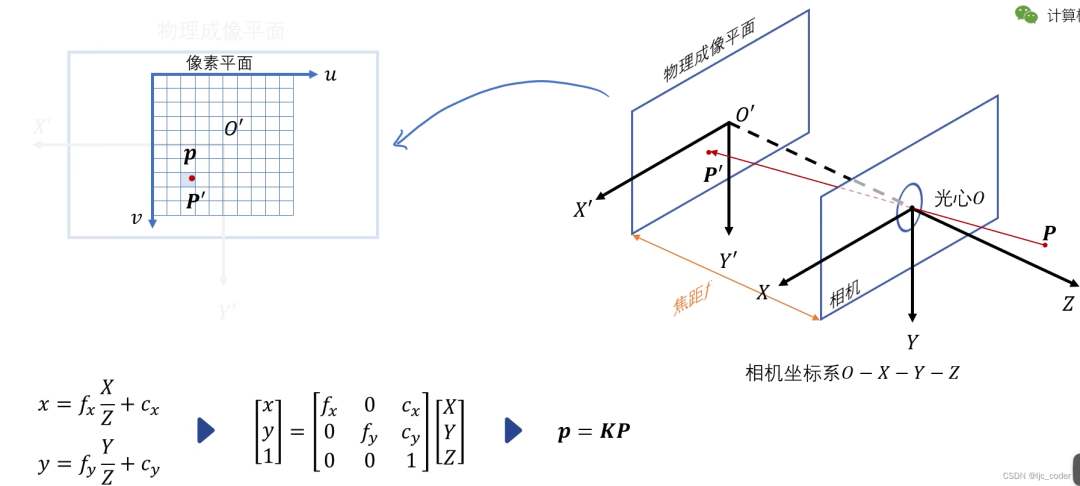
总结一下
整个投影过程都可以通过下面的内参矩阵描述 fx,fy,cx,cy
主要通过k1,k2,k3三个参数来描述相机的径向畸变(常用k1,k2就够了)
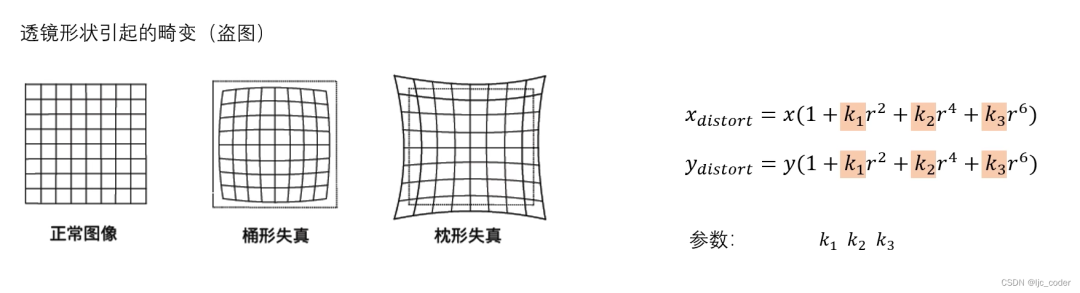
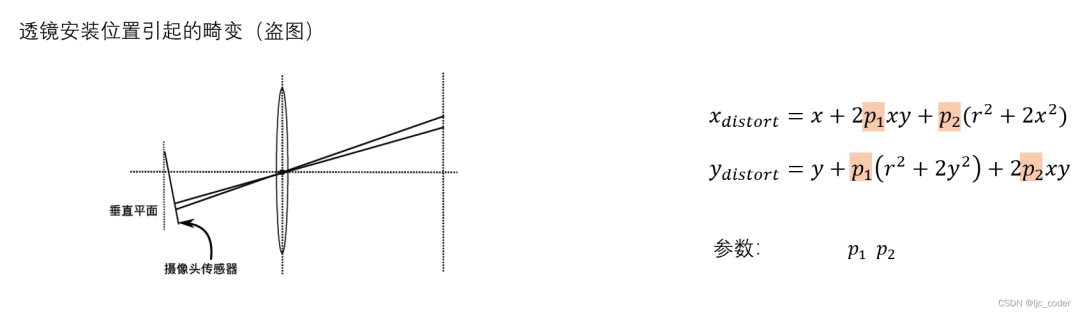
对于切向畸变,一般使用p1,p2来描述
2、工具
对于 kinect 可以用 iai_kinect2 工具包做标定
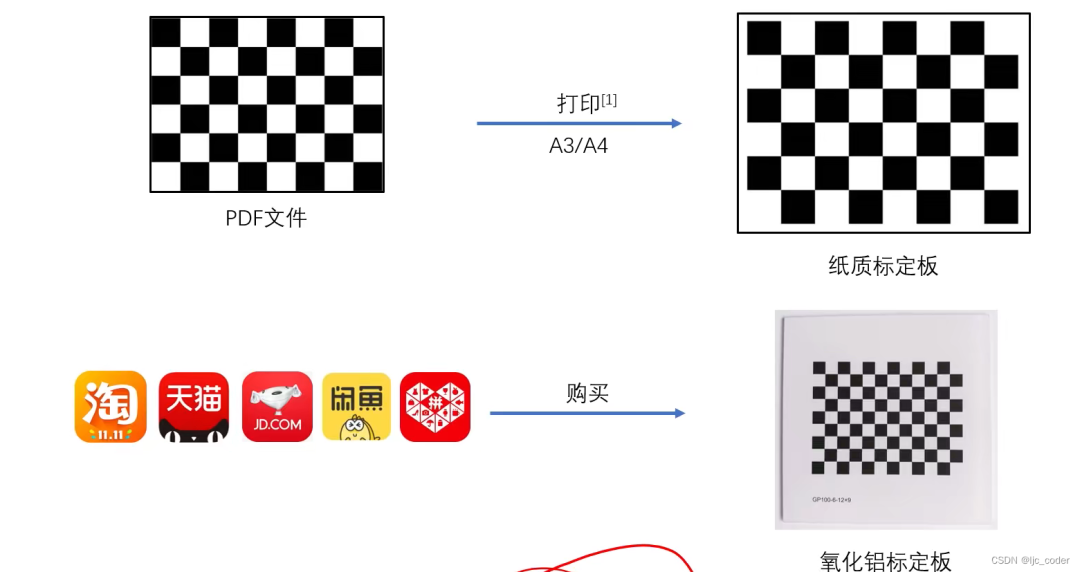
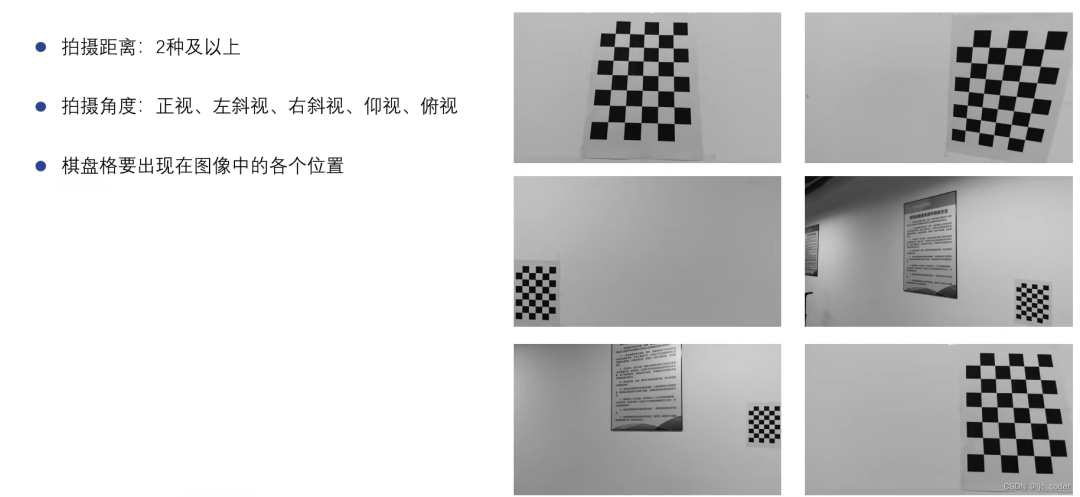
3、棋盘标定板
4、彩色相机标定
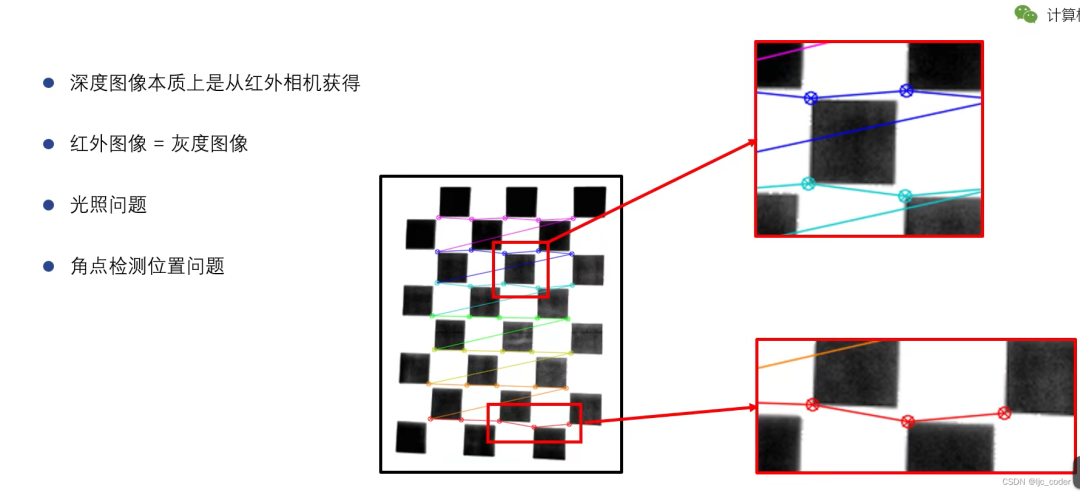
5、红外相机标定
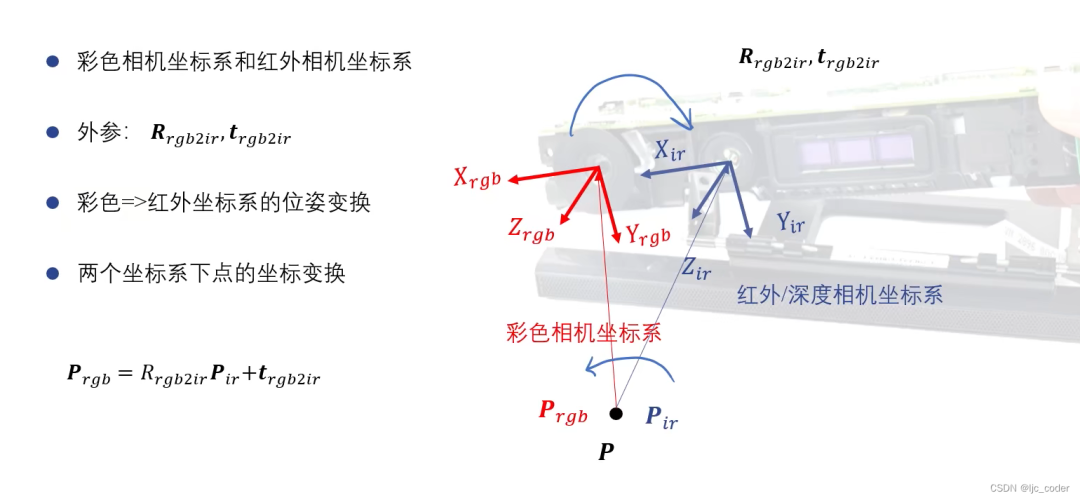
6、彩色相机和红外相机的外参标定
描述深度坐标系下的点如何表示在RGB图中
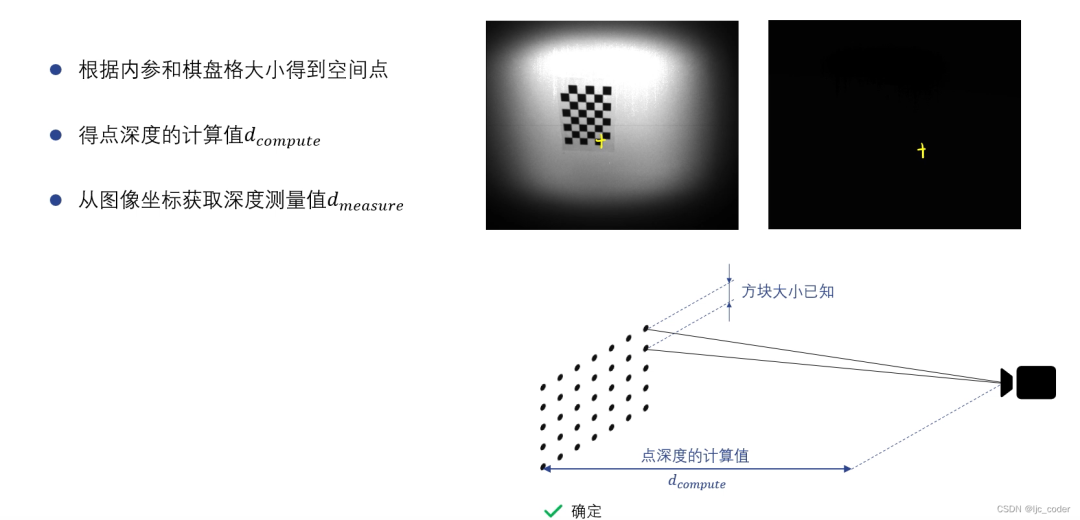
7、深度相机的深度校准
3
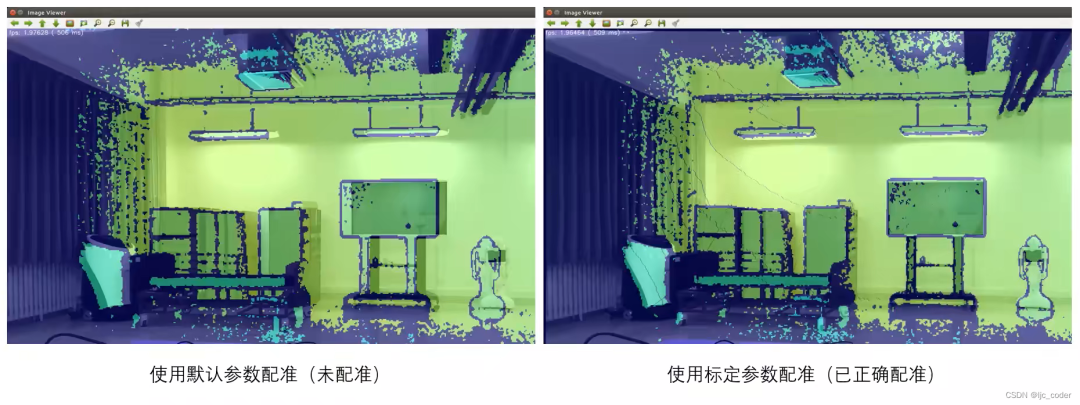
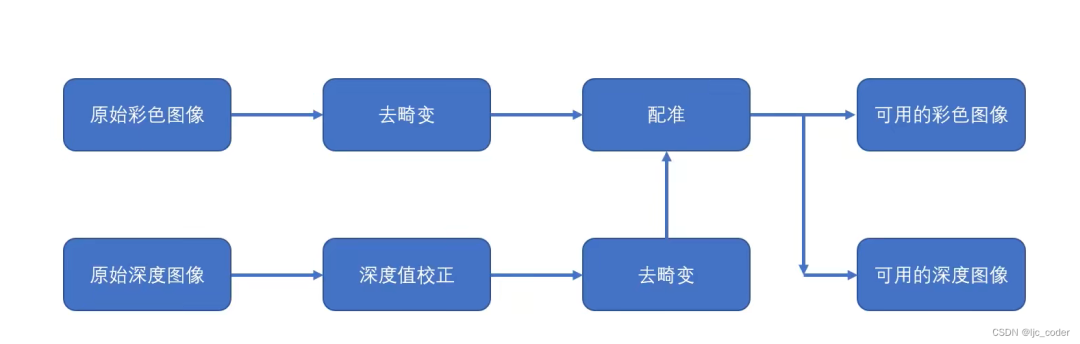
图像配准
1、配准原理
(配准后的深度图不对)
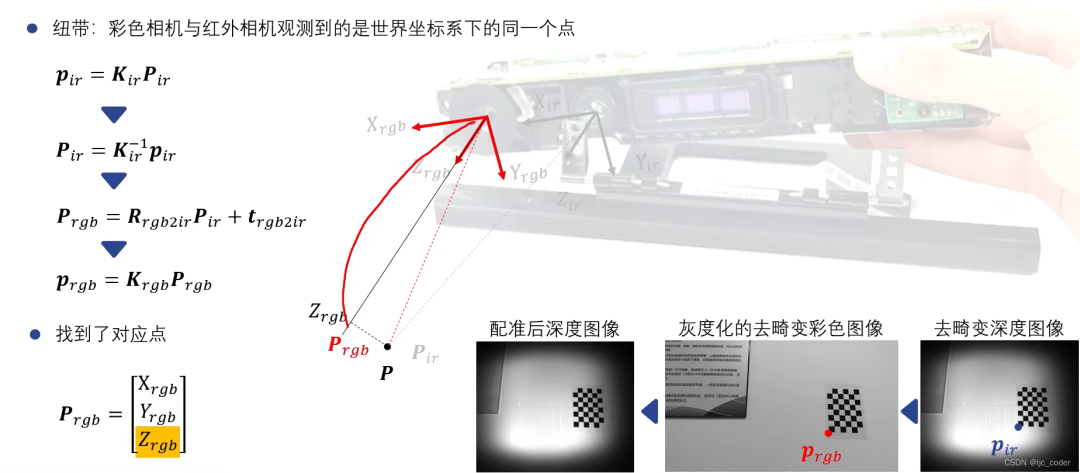
正确
4
总结
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
图像
+关注
关注
2文章
1096浏览量
42437 -
相机
+关注
关注
5文章
1605浏览量
56022
原文标题:RGBD相机的标定和图像配准
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
配网图像监拍装置:配网监测的性能标杆
在配网监测设备市场中,配网图像监拍装置凭借全面的性能参数、可靠的运行表现和丰富的功能配置,成为行业性能标杆,为配网监测提供了高品质解决方案。 硬核的硬件配置奠定了其卓越的监测基础。摄像
工业视觉相机的应用有哪些
工业相机,最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图

黑白相机与彩色相机的成像优势分析以及常见的误区说明
黑白相机与彩色相机的应用区别,简单来说就是定性定量分析与绚烂图案采集的应用区别。 一,彩色相机的成像核心 1974年,柯达公司的工程师Bryce Bayer提出了一个全新方案,在图像传

为什么高端相机都要配它?图像采集卡的3大核心使命
在工业检测、医疗影像、半导体制造等对成像质量与效率要求极致的领域,高端相机早已成为核心装备。但很多人会发现,这些动辄数十万的高端相机,很少单独使用,往往必须搭配一块图像采集卡才能发挥全部性能。有人

相机高清却数据传不动?这篇图像采集卡选型攻略,解决90%的工业视觉痛点
在工业视觉领域,高清相机的使用已成为提升检测精度和效率的关键。然而,许多企业在部署高清相机后,却发现数据传输不畅,导致图像无法正常采集、处理或传输,严重影响生产效率和检测质量。本文将围绕高清相
CANape标定窗口被锁无法标定
问题现象:解决方案:标定窗口被锁定无法标定除了ECU功能权限限制外可能存在的情况是CANape的工程配置影响的,主要有以下三个方面:1、CalibrateonlineDevice没有激活,需要将工程

工业CMOS相机的原理及基础知识
我们知道在图像采集和处理的过程,最基本的是要把实物尽量真实地反映到虚拟的图像上。在机器视觉领域,图像采集和处理的过程需要用到工业相机。工业相机

IMU+多相机高速联合自动标定方案
随着视觉惯性传感器在自动驾驶、机器人、AR/VR 等领域规模化落地,多相机+IMU 联合标定需求呈爆发式增长,多相机+IMU 联合标定领域尚属空白。
感算商城联合知名方案公司推出国
发表于 10-23 14:04
GraniStudio:相机标定例程
1.文件运行 导入工程 双击运行桌面GraniStudio.exe。 通过引导界面导入相机标定例程,点击导入按钮。 打开相机标定例程所在路径,选中相

工业相机图像采集卡:技术剖析、应用场景与未来发展
工业相机图像采集卡,作为连接工业相机与计算机系统的桥梁,在机器视觉领域扮演着至关重要的角色。它将工业相机采集的模拟或数字图像信号转换为计算机

工业相机图像采集卡:机器视觉的核心枢纽
工业相机图像采集卡是用于连接工业相机与计算机的关键硬件设备,主要负责将相机输出的图像信号转换为计算机可处理的数字信号,并实现高速、稳定的数据

《聊一聊ZXDoc》之汽车标定、台架标定、三高标定
ZXDoc支持XCP/CCP标定功能,标定工作贯穿主机厂与Tier1厂商汽车ECU研发、生产、测试的整个流程,是保障ECU性能达标、功能稳定的关键。什么是XCP/CCP标定?XCP/CCP标定




评论