 智造之眼丨多目标定位抓取
智造之眼丨多目标定位抓取

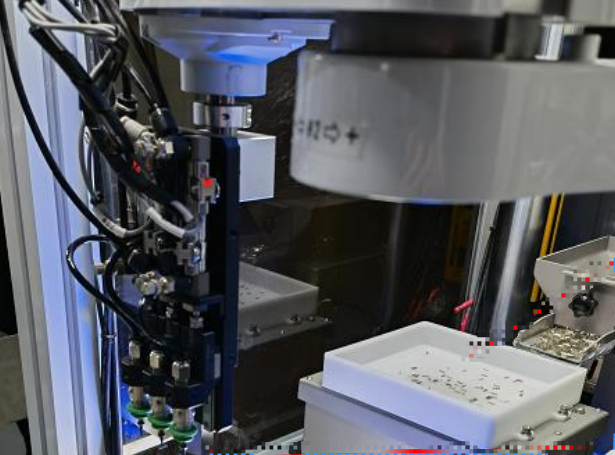
多目标定位抓取:相机一次性拍摄多个目标产品,视觉软件进行图像分析定位,将像素坐标转换为物理坐标,系统传递多个产品的物理坐标给机械手,机械手进行多位置正确取放产品。
01.多目标定位抓取优势
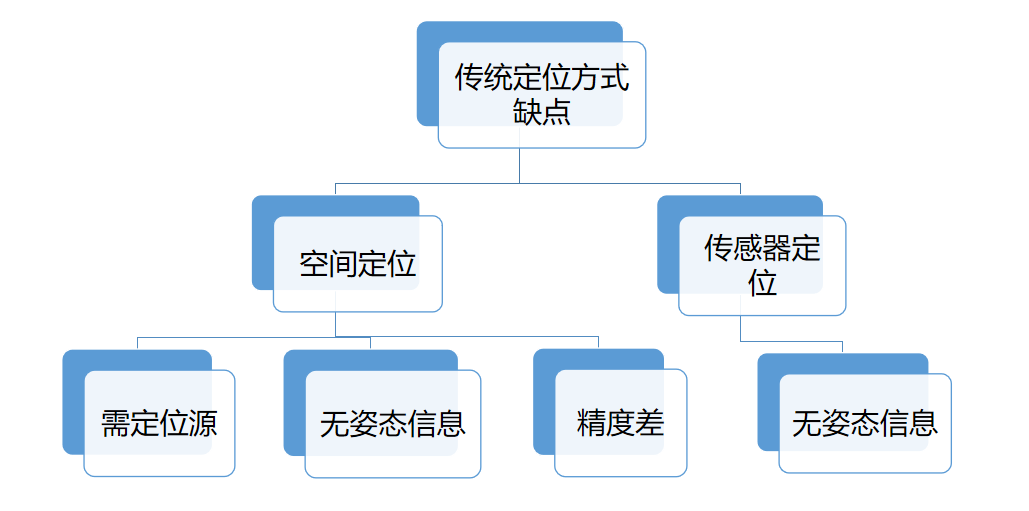
多目标定位抓取相对传统定位而言:可同时传递多个产品坐标位姿信息给机械手实现多位置抓取,大大提升工业生产的速度和精度。
02.多目标定位原理
坐标转换--四坐标系之间转换
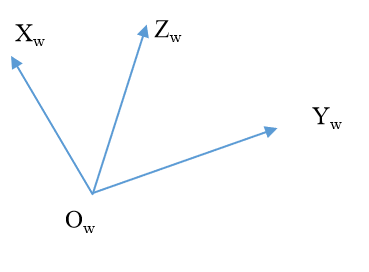
世界坐标系
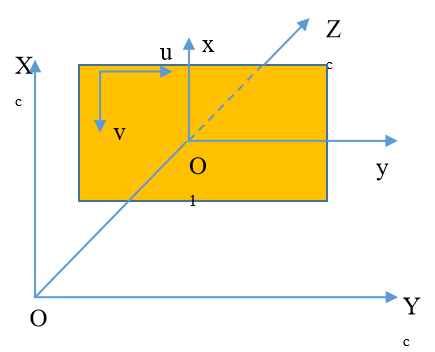
相机坐标系、图像坐标系与像素坐标系

四坐标系转换关系
03.多目标定位过程
视觉系统
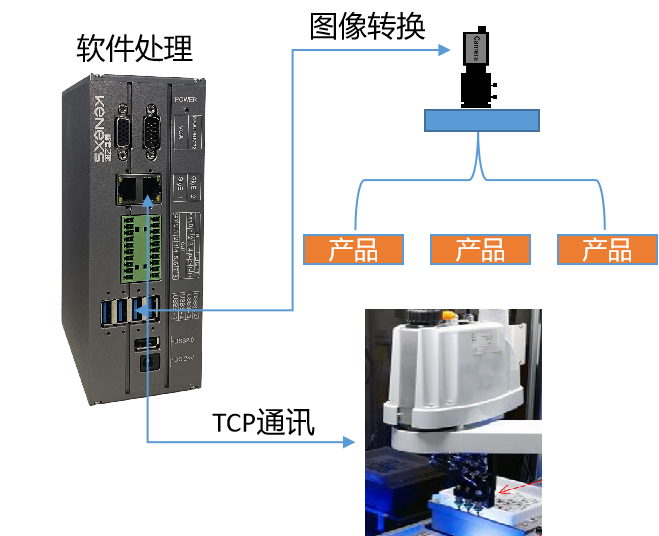
转换步骤
由此,机械手连接通讯获得位置坐标,实现多目标产品的定位抓取。
04.多目标定位抓取-算法运用
如何获取产品特征信息?
1、特征值提取(圆、圆环、矩形等)
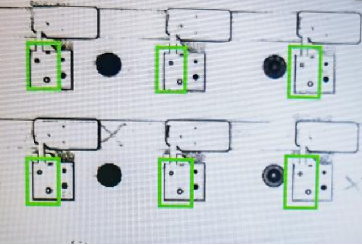
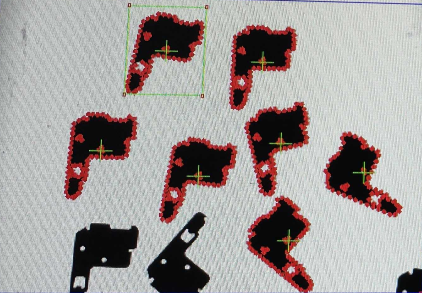
2、轮廓匹配法
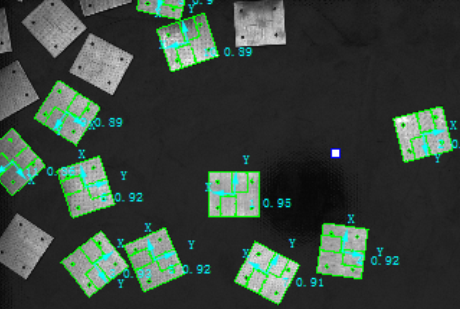
3、模型匹配法等
05.多目标定位抓取-工业应用
由于工业生产应用类型多样,实际定位不仅需要定位产品的位置信息,还需要定位产品的姿态信息。
工业生产应用类型
1、柔性振动盘机械手多位置抓取产品
2、多位置旋转吸嘴多位置抓取

3、机械手四位置多产品抓取

智造之眼-应用数据
检测件:五金件
产品大小:约20X15mm
相机配置:500万~2000万
重复抓取精度:0.04mm
拍照处理速度:400~500ms
一次拍照定位数量:10~12pcs
专业做视觉,认真做研发。智造之眼视觉团队坚持突破技术,执着产品,深入应用,持之以恒的打造中国的视觉品牌,为世界提供又好又便宜的视觉产品和服务。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器视觉
+关注
关注
166文章
4829浏览量
126503 -
视觉检测
+关注
关注
2文章
462浏览量
20593
发布评论请先 登录
相关推荐
热点推荐
Firefly-RK1828 赋能视频大模型:多目标+全场景,引领智能分析新风向
问题。针对这一问题,我们基于FireflyRK1828开发套件,搭载南京锐景专属视频分析算法,以视频大模型为核心,实现「多目标检测+全场景适配」,可自定义各种问题,适应

阻抗分析仪的作用:洞察物质电学特性的科学之眼
在现代电子工程、材料科学与生物医学等领域,精准掌握材料与器件的电学特性至关重要。阻抗分析仪作为一种高精度的电子测试仪器,正是实现这一目标的核心工具。它通过测量复数阻抗随频率的变化,为科研人员和工程师提供了深入洞察材料与元器件性能的“科学之

机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
、巡检机器人、教育竞赛等场景。下一步可探索:
多目标切换跟随;
动态避障与跟随并行;
抓取后自动放置(结合上篇的导航回位功能)。
*附件:移动抓取演示.zip
演示视频:米尔RK3576机器人方案机械臂
发表于 04-10 21:23
预告 多目标追踪24G雷达传感
在智能家居、智慧商业、物联网设备日益普及的今天,精准、可靠的人体感知与定位技术成为产品智能化的核心。深圳市海凌科电子有限公司正式推出HLK-LD2453高精度多目标识别毫米波雷达传感器,以毫米波技术

CANape标定窗口被锁无法标定
问题现象:解决方案:标定窗口被锁定无法标定除了ECU功能权限限制外可能存在的情况是CANape的工程配置影响的,主要有以下三个方面:1、CalibrateonlineDevice没有激活,需要将工程

IMU+多相机高速联合自动标定方案
“IMU+多相机高速联合自动标定仪”,20 秒完成全流程,一举填补国产高端标定装备市场断层。
机械臂全程抓取位姿,20秒完成多相机+IMU联合标定,人工零干预,产线节拍提升30-10
发表于 10-23 14:04
商品销量数据抓取接口
原理、实现步骤、代码示例和注意事项。内容基于Python技术栈,确保真实可靠。 一、接口原理 商品销量数据通常存储在电商平台的服务器上(如淘宝、京东)。抓取接口的核心是通过HTTP请求模拟用户行为,从目标页面或API获取数据。

GraniStudio:相机标定例程
说明 实现相机到标定位置进行标定。 注意:每次打开软件请先点击复位,确保位置安全;准备九点标定版;连接相机需加载对应GS提供的相机库,采用绝对路径,因此使用前如果相机库路径在电脑上没有,需手动导入相机DLL相机,使用过程如2.3

空心绝对值编码器:工业精密测量的“智慧之眼”
在工业自动化浪潮席卷全球的今天,每一道生产工序的精度与效率都关乎企业的核心竞争力。从数控机床的精密加工到机器人的智能抓取,从航空航天设备的姿态控制到物流机械的精准定位,工业设备对位置反馈的严苛要求
基于RK3576开发板的yolov11-track多目标跟踪部署教程
1.yolov11_track简介(多目标跟踪算法)YOLO11是UltralyticsYOLO系列实时物体检测器的最新版本,重新定义了在尖端准确度、速度和效率方面的可能性。在前几代YOLO版本

雷达水位监测系统:水利监测的智慧之眼
雷达水位监测系统:水利监测的智慧之眼 柏峰 【BF-LDSW】在水利领域,水位监测是保障水安全、合理调配水资源以及预防洪涝灾害的重要基础工作。传统的水位监测方法存在诸多局限性

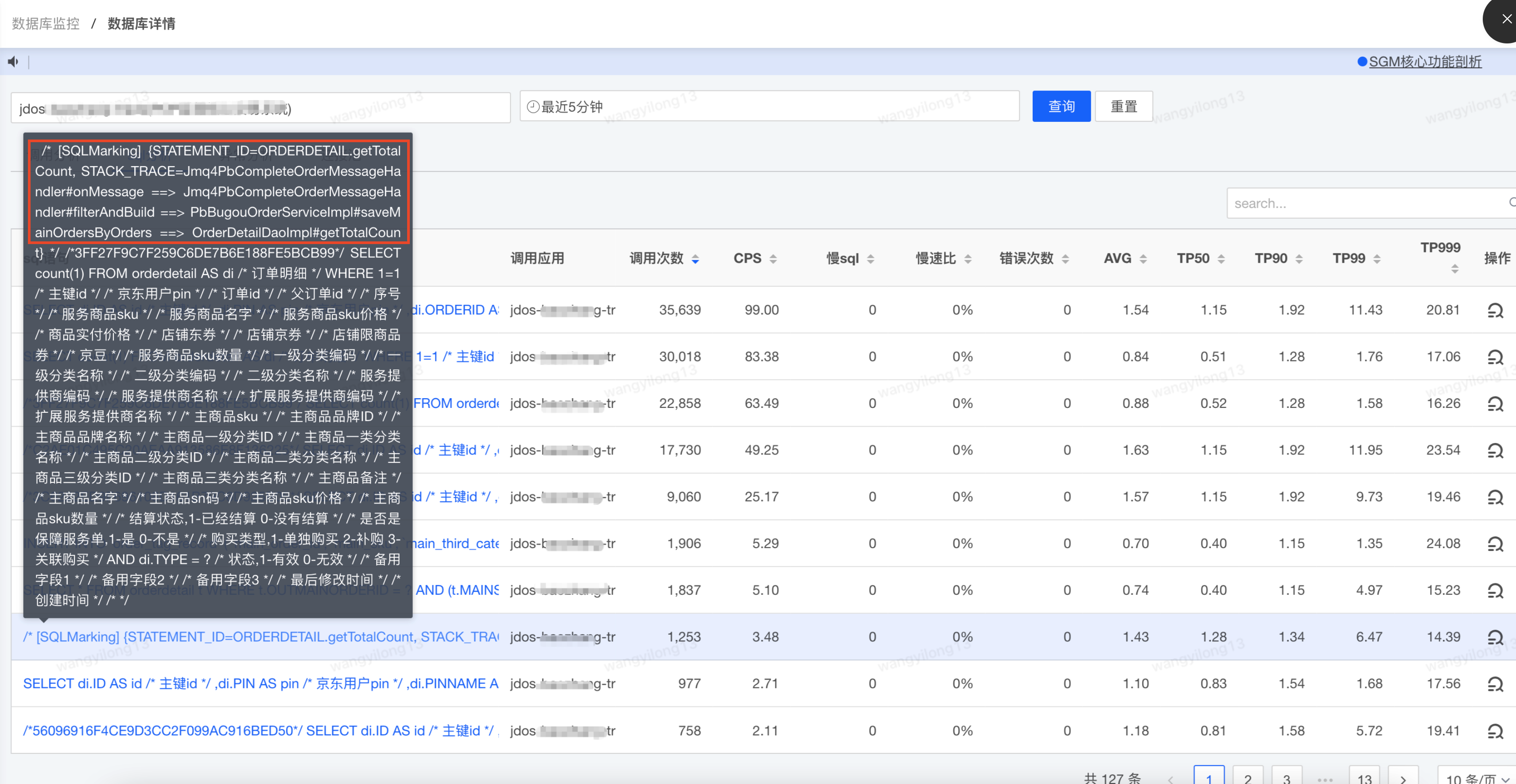
大促数据库压力激增,如何一眼定位 SQL 执行来源?
语句成为了性能瓶颈。面对这样的困境,本篇文章提出了对 SQL 进行 “染色” 的方法来帮助大家 一眼定位问题 SQL,而无需再在多处逻辑中辗转腾挪 。本文的思路主要受之前郭忠强老师发布的 如何一眼
【HarmonyOS NEXT】多目标产物构建实践
: string = BuildProfile.baseApiUrl

参考文章
配置APP多目标构建产物
发表于 05-16 16:22
Allegro Skill布局功能之远程抓取器件介绍
过使用“远程抓取器件”功能,用户可以批量选取多个器件,随后通过鼠标左键逐个点击放置,实现高效精准的器件布局。该功能特别适用于在大规模芯片周边配置去耦电容、电阻等元件,能够快速将元件定位到目标焊盘附近或芯片背面。

《聊一聊ZXDoc》之汽车标定、台架标定、三高标定
ZXDoc支持XCP/CCP标定功能,标定工作贯穿主机厂与Tier1厂商汽车ECU研发、生产、测试的整个流程,是保障ECU性能达标、功能稳定的关键。什么是XCP/CCP标定?XCP/CCP标定




评论