 X3派和PC虚拟机之间基于ROS2和wifi的通信
X3派和PC虚拟机之间基于ROS2和wifi的通信

背景介绍
多机通信是ROS的基础能力之一,相比于ROS1,ROS2通过非常简单的配置即可实现多机通信。
对于两个安装了ROS2(或者地平线的TogetherROS)的设备,设备的IP地址在同一网段,并且ROS_DOMAIN_ID相同(如果不设置,默认是0),即可实现设备之间通过ROS2通信。
下面介绍X3派和PC虚拟机都连接无线wifi网络的情况下,通过ROS2实现跨设备通信。
准备工作
X3派
- 已安装Ubuntu 20.0.4系统,安装方法:1. 快速开始 — 旭日X3派用户手册 1.0.0 文档 (horizon.ai)
- 已安装ROS2 Foxy,推荐安装地平线基于ROS2 Foxy深度优化和扩展的TogetherROS,安装速度更快。安装方法:2.2. 通过DEB包安装 — 地平线机器人平台用户手册 1.0 文档 (horizon.ai)
- 已连接wifi,连接方法:2. 系统配置 — 旭日X3派用户手册 1.0.0 文档 (horizon.ai)
PC虚拟机
- PC宿主机为windows,使用VMware workstation 15.5举例说明。
- 虚拟机已安装Ubuntu 20.0.4系统。
- 虚拟机已安装ROS2 Foxy。
操作方法
- PC宿主机断开有线连接,和X3派连接同一wifi。
- 虚拟机网络设置成桥接&复制物理网络连接状态:
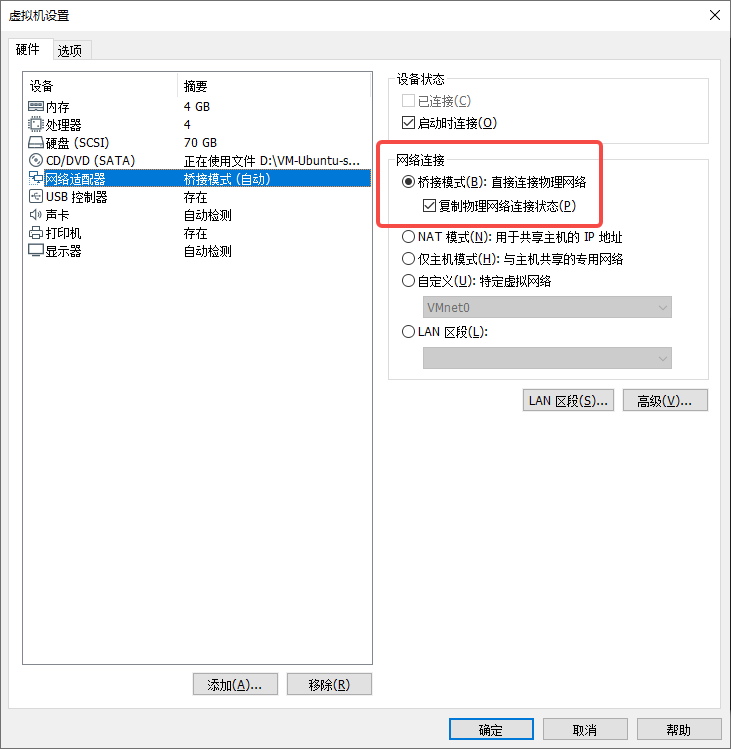
- 启动虚拟机。
结果分析
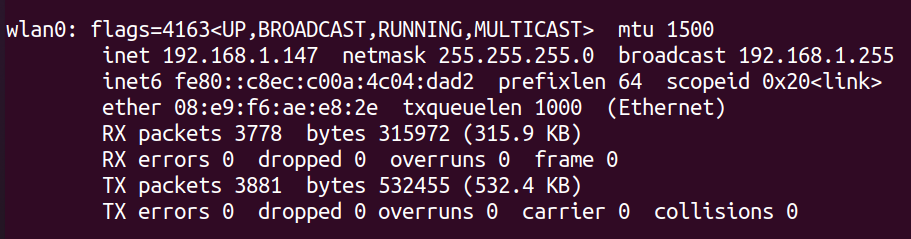
查看X3派的IP地址:
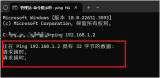
查看PC虚拟机中Ubuntu的IP地址:
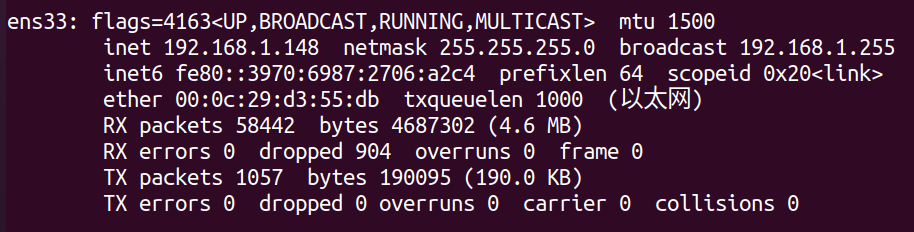
连接同一wifi后,X3派和PC虚拟机中Ubuntu的IP地址相同。开始测试X3派和PC虚拟机之间通过ROS2进行通信。
X3派发布消息:
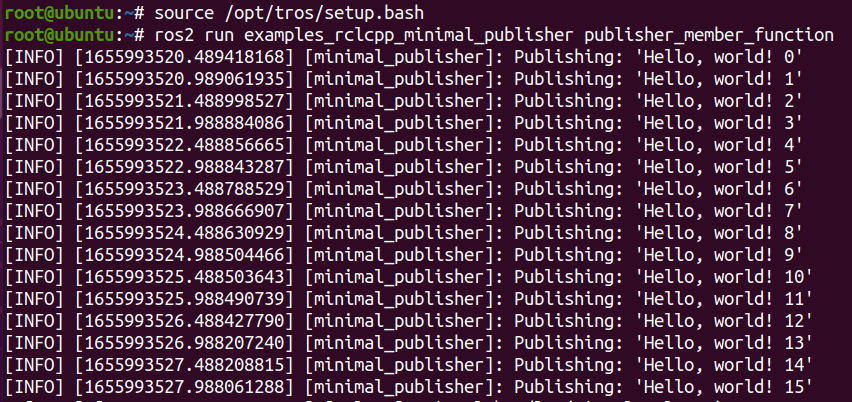
PC端订阅消息:
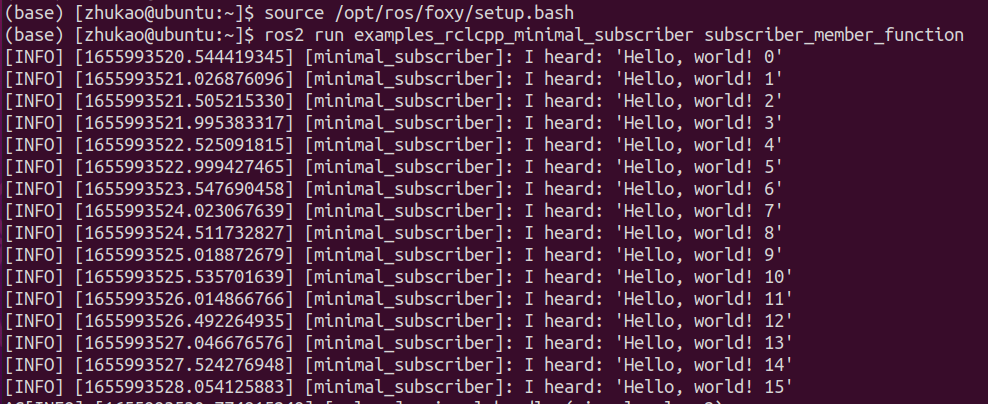
可以看到,PC端的ROS2 Foxy订阅到了X3派TogetherROS发布的消息,说明两个设备在连接同一wifi的情况下,通过ROS2跨设备通信成功。
本文转载自地平线开发者社区
原作者:zhuk
原链接:https://developer.horizon.ai/forumDetail/98129467158916230
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
物联网
+关注
关注
2951文章
48270浏览量
419671 -
人工智能
+关注
关注
1821文章
50523浏览量
267772
发布评论请先 登录
相关推荐
热点推荐
RK3576单板机玩转ROS2:通信测试+编译部署全流程详解
本文为创龙科技RK3576 单板机 ROS2 开发指南,涵盖 ROS2 Humble 环境搭建、节点通信测试、turtlesim 仿真及功能包编译部署。支持 Python/C++ 双语言开发,提供交叉编译与板端运行的完整流程。创

瑞芯微(EASY EAI)RV1126B ROS2安装
一种“机器人框架(robotframeworks)”。1.2ROS2与ROS1的区别ROS2作为ROS1的继任者,在保持ROS核心功能的基础

基于米尔安路飞龙派 MYD-YM90X开发板多功能智能车系统开发
米尔安路 MYC-YM90X(SALDRAGON1)FPGA 开发板为核心,完成 ROS2 系统移植、RTK,SLAM,Nav2 路径规划部署,通过 FPGA 专属硬件加速实现纳秒级协同响应,配套智慧运
发表于 04-25 16:23
从数据采集到回放验证:ADTF 适配 ROS2 的 ADAS 测试实践
引言在智能驾驶项目里,很多团队都会遇到同一个问题:数据采集并不难,难的是把采到的数据稳定地用起来。路测之后,工程团队往往要面对几个高频挑战:传感器数据来源多、格式多,链路联调成本高;算法和测试团队常用ROS2生态,但工程化流程需要更强的可控性;ROSBA

RK3562 单板机嵌入式 ROS2 开发指南:环境搭建与工程编译
本文为创龙科技RK3562 单板机 ROS2 Foxy 开发指南,涵盖系统测试与开发全流程。详细说明 Python/C++ 节点通信、turtlesim 可视化测试的实操指令,以及上位机开发环境搭建

开发必看,RK3576基于Ubuntu22.04安装 测试ROS2机器人系统
(RobotOperatingSystem)和ROS2并非传统意义上的操作系统内核,而是面向机器人开发的开源软件框架,提供节点通信、硬件抽象、算法库、仿真调试等核心能力,降低

ROS2 SLAM建图与导航实战--基于米尔RK3576开发板
需要安装Gazebo仿真环境以及经典的TurtleBot3机器人模型,尽量在x86 虚拟机安装仿真,arm64架构turtlebot3支持不足。
# 安装Gazebo与
发表于 03-12 17:55
虚拟机数据恢复—虚拟机vmdk文件被删除的数据恢复案例
本次数据恢复涉及一台R710系列服务器和一台MD3200系列存储,上层是ESXI5.5版本的虚拟机和虚拟文件。因客户机房非正常断电,虚拟机无法启动。机房管理员检查发现虚拟机配置文件丢失

RK平台ROS2适配全指南:从编译到运行,手把手搞定嵌入式机器人开发
在嵌入式机器人与智能硬件领域,瑞芯微(Rockchip)的 RK356x、RK3588 等 arm64 芯片凭借高性能、低功耗的优势,成为众多开发者的首选硬件平台;而 ROS2(Robot

初识ros2 功能包建立与可执行文件的配置
本文介绍了ROS2程序的两种启动方式:直接运行可执行文件(ros2 run)和使用启动文件(ros2 launch)。重点讲解了Python软件包的结构,包括package.xml、setup.py
米尔RK3576成功上车!ROS2 Humble生态系统体验
ROS_DISTRO=humble
ROS_PYTHON_VERSION=3
确认运行ROS2 Humble长期支持版,生态完整。
2.
发表于 01-15 18:30
创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—ROS2系统使用说明
本文围绕创龙科技研发的评估板,详解 ROS2 系统使用方法。涵盖 ROS2 环境搭建、核心概念讲解、节点通信测试、功能包创建与编译,以及可视化工具 RViz 的使用,还包括基于评估板的 ROS

搭建自己的ubuntu系统之创建ubuntu虚拟机
打开VMware软件,点击创建新的虚拟机。进入以下界面:选择自定义,点击“下一步”。选择对应VMware版本的兼容性,版本可在帮助->关于VMware Workstation中
发表于 09-25 09:39
奇瑞风云X3系列双车上市
8月16日,奇瑞汽车旗下风云品牌全新方盒子产品序列——风云X3与风云X3 PLUS正式宣告上市。风云X3系列基于iCAR 03系列焕新升级而来,在造型设计、动力性能、智能科技、功能配置及工艺品质等维度实现全方位跃升。
TECS OpenStack资源池虚拟机网络二层地址无法互通的问题处理
某运营商TECS OpenStack使用主机overlay SDN方案组网,运维人员在创建虚拟机测试虚拟机网络状态时发现问题:在其中一台主机上创建两台同网段虚拟机,虚拟机



评论