 什么是焊接机器人焊缝跟踪寻位?
什么是焊接机器人焊缝跟踪寻位?

严格来讲焊接机器人焊缝跟踪寻位系统由两部分组成:焊前通过焊缝寻位功能检测组对间隙是否合适,并精确达到需要焊接接头点;焊中实时跟踪焊缝及监控产品变形量。
焊缝跟踪:指在焊接位置前方安装光学传感器进行数据采集,或者通过电源的焊接参数采集,然后传输到焊接机器人,进行自适应的各种模糊控制算法校正焊接机器人或专机的轨迹,实现自适应控制,达到实时的焊缝跟踪。
焊缝寻位:指使用一次或多次寻找来定位焊缝的过程,通过在焊接之前移动焊接机器人或编辑机器程序路径来准确定位将要焊接的接头。

焊缝跟踪是在焊接时实时检测出焊缝的偏差,调整焊接路径和焊接参数,保证焊接质量的可靠性。
由于工件的加工误差(工件间的尺寸差异、坡口的准备情况等)、装夹精度以及焊接时的热变形等因素的存在,以示教-再现方式工作的焊接机器人在焊接时常常因为焊缝和示教轨迹有偏差而导致焊接质量下降。所以焊缝跟踪是保证焊接机器人焊接质量的一个重要的因素。
传感器是焊缝自动跟踪系统的关键部分。其作用是检测出焊缝的位置和形状信息并转化为信号,控制系统对信号进行处理,并根据检测结果控制自动调节机构调整焊枪位置,从而实现焊缝自动跟踪。
激光焊缝跟踪传感器配合焊接机器人使用等于是给机器人装上了眼睛,可以正确引导机器人进行焊接定位。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
焊缝跟踪
+关注
关注
0文章
210浏览量
11127
发布评论请先 登录
相关推荐
热点推荐

基于BL350平台的焊接机器人智能控制与质量追溯解决方案
在汽车制造、重型机械、压力容器等高端焊接领域,对焊接质量的稳定性、工艺的可重复性以及生产过程的可追溯性提出了近乎严苛的要求。然而,传统的焊接机器人系统架构,正面临着一系列影响其智能化升级与卓越品质实现的关键瓶颈。
嵌入式计算机AF208:焊接机器人高效精准作业的核心引擎
焊接机器人主要由机械臂、焊接系统、嵌入式工业计算机,变位器、机器人系统等组成,适用于高质量、高精度的工业焊接作业。然而,在复杂的产线上,传统焊接机器

激光焊接机在焊接锯片的工艺流程
激光焊接机在焊接锯片领域展现出显著优势,其工艺流程精密且高效。激光焊接利用高能量密度的激光束作为热源,实现材料的快速熔合,尤其适合锯片这类对焊缝质量和结构强度要求较高的工具制造。下面来

自动化焊接倍福CX系列PLC和焊接机器人通过协议转换网关进行通讯去控制DeviceNet从站设备案例
、输送线等外围设备的精准同步控制。焊接核心工艺由多台高性能焊接机器人承担,这些机器人采用DeviceNet现场总线协议,用于接收焊接参数指令及反馈实时状态。 面临痛点 1. 协议异构

工业显示器在焊接机器人中的应用
在焊接机器人领域,工业显示器通过高精度显示、环境适应性、系统集成与数据交互等核心功能,成为实现自动化焊接、提升生产效率与质量的关键组件。以下从技术实现、应用场景及实际效益三个维度展开分析:

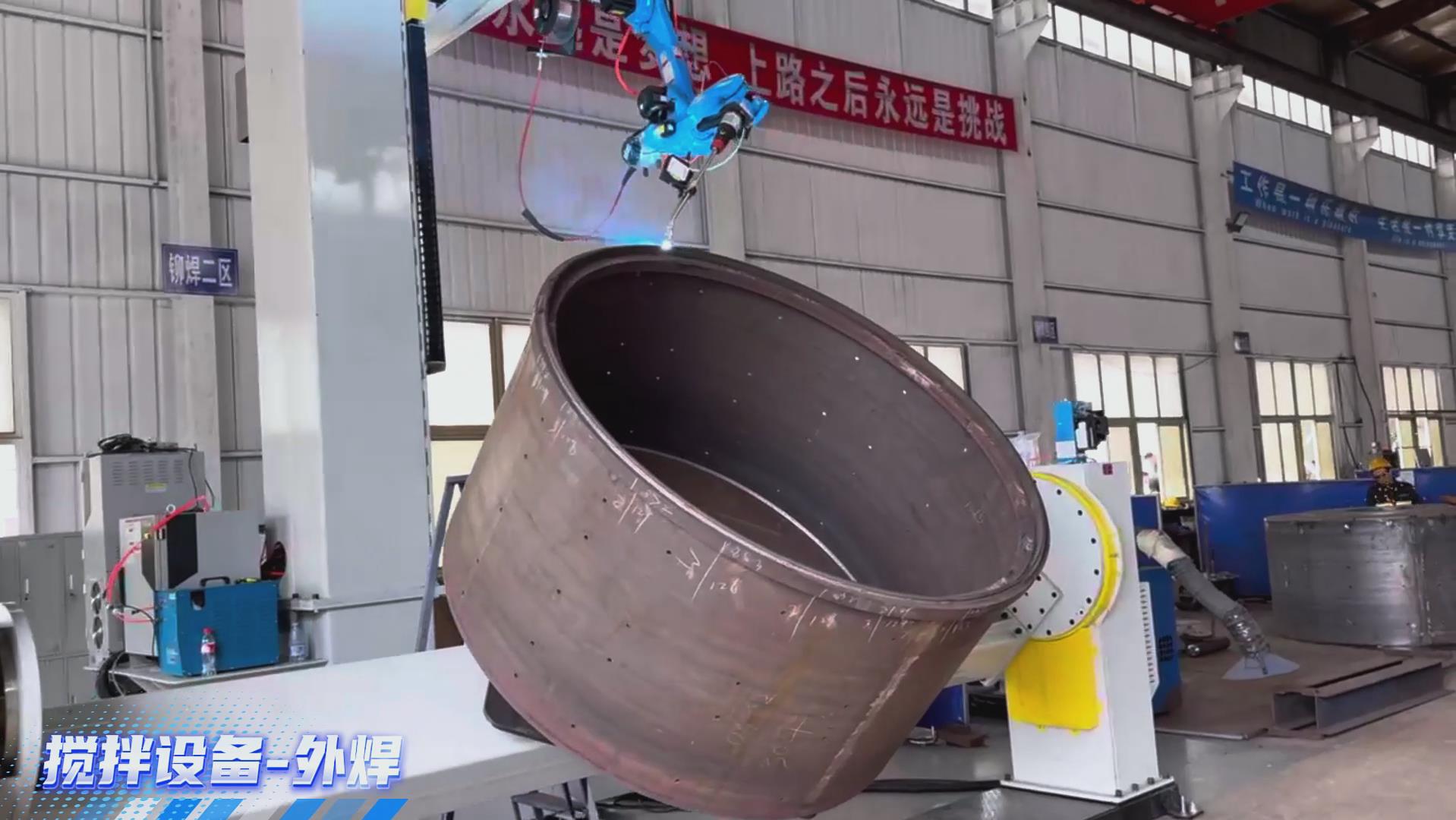
卡诺普机器人搭载创想焊缝跟踪系统,实现搅拌设备焊接智能化升级
机器人,应用于搅拌设备的焊接场景,有效解决焊缝偏差、路径复杂、焊接一致性差等问题,有效推动焊接工艺向智能化、自动化升级。 创想智控激光

机器人通信的贴身翻译,PROFINET转Ethercat网关的高能玩法
的重要组成部分。本文将介绍发那科焊接机器人的工作原理、特点及其在自动焊接中的应用。 发那科焊接机器人主要采用伺服电机驱动,并配备一套精确的控制系统。其控制系统包括32位CPU和64
创想智控焊缝跟踪系统携手广数机器人实现农机齿轮焊接智能化升级
随着农业机械行业向智能制造迈进,齿轮焊接作为其中的关键环节,对焊接精度和效率有着更高的要求。传统焊接方式依赖人工操作,难以适应现代化批量生产的需求。创想智控激光焊缝
创想智控激光焊缝跟踪系统在发那科机器人智能焊接火车端墙的应用
,无法满足如今的要求。对此,创想智控推出的激光焊缝跟踪系统与发那科工业机器人深度集成,为端墙智能焊接提供高效、精准的解决方案。 火车端墙自动焊的技术难题 火车端墙是车体结构中关键的连接
创想智控激光焊缝跟踪适配安川机器人双机协同自动焊接变压器油箱
我国的制造业正在逐步迈入智能化、自动化的时代,焊接过程的精准度与效率成为衡量生产水平的重要标准。针对变压器油箱等结构复杂、焊接精度要求高的工件,创想智控激光焊缝跟踪器结合安川





评论