 保姆级教程 | i.MX 93开发板适配Zephyr RTOS全解析
保姆级教程 | i.MX 93开发板适配Zephyr RTOS全解析

前言
Zephyr是Linux基金会旗下开源实时操作系统(RTOS),由Intel、NXP、Google、Qualcomm等头部厂商持续支持,现已迭代至v4.x。它支持700余款开发板与主流处理器架构。
Zephyr 不是传统 RTOS 的替代品,而是将云计算时代的开发理念引入资源受限的嵌入式世界——解决碎片化、安全性和开发效率问题的下一代基础软件,它的设计理念是:模块化、可裁剪、开箱即用。
i.MX 9352作为NXP推出的轻量级边缘AI处理器,集成2个Cortex-A55核和1个Cortex-M33实时核,其架构设计充分体现了对实时性与复杂任务处理能力的兼顾。为了帮助开发者充分利用i.MX 9352 M33核的实时能力,结合VSCode+MCUX扩展的完整开发体验,本文将介绍如何在Zephyr中完成M33核PWM驱动的验证,帮助读者快速上手 Zephyr 在工业级 SoC 上的移植与测试实践。
演示平台:飞凌嵌入式OK-MX9352-C开发板

1、为什么选择Zephyr?
1.1 相比传统RTOS,Zephyr的核心优势

从"写代码配置硬件"到"声明硬件关系"
传统痛点:每换一个MCU引脚或外设,就要重写驱动、调寄存器、改编译选项。Zephyr以Devicetree硬件蓝图(.dts)描述整个硬件布局,更换硬件只需修改蓝图,核心业务代码几乎不动;搭配Kconfig图形化配置工具,可像 Linux 内核一样灵活裁剪系统功能。
从"功能实现"到"安全与功耗原生设计"
传统痛点:传统RTOS的安全、低功耗能力多为后期追加功能,漏洞多、优化难度大。Zephyr从底层设计就以安全为核心,覆盖安全启动链、MPU内存保护、加密服务等全链路安全能力;基于事件驱动的电源管理框架,可实现微安级精准功耗控制。
从"单一固件"到"可移植的软件资产"
传统痛点:A公司芯片写的驱动,在B公司芯片上几乎要重写。Zephyr 统一设备模型,驱动一次开发可跨厂商芯片复用;蓝牙、Wi-Fi、Matter等协议栈即插即用,与硬件底层隔离,让核心代码成为可复用、可迭代的软件资产。
1.2 Zephyr vs FreeRTOS
Zephyr和FreeRTOS都属于实时操作系统,且都面向物联网场景深化布局,但二者在软件架构、内核设计上有明显差异。
核心设计哲学

系统架构

协议栈与功能

资源占用Cortex-M4最小核无外设

开发环境与调试

根据上述对比,发现Zephyr也有一下短板:
- 学习曲线陡峭
- 资源占用更大
- 构建系统复杂
- 上下文切换性能不如FreeRTOS
从对比能看出,Zephyr的短板主要集中在入门阶段和极致资源受限场景,一旦团队熟悉开发流程、硬件资源满足要求,这些劣势会快速弱化;而它的可移植性、安全能力、生态优势,会随着项目复杂度提升愈发明显。
1.3 Zephyr 应用场景
医疗与可穿戴设备
Zephyr的确定性实时响应和低功耗特性,可支撑连续血糖监测、心脏监护等医疗级应用,满足量产医疗设备的技术要求。
支持10BASE-T1S等工业以太网协议,适配工厂自动化、过程控制场景,OSADL已为Zephyr建立工业领域量化性能基准。
从Matter协议支持到蓝牙5.4完整协议栈,Zephyr正成为智能家居生态核心支撑。Arduino VENTUNO Q平台已采用 Zephyr确保时间关键型任务的确定性执行。
随着汽车电子架构向集中式演进,Zephyr的模块化设计和内存保护机制满足了汽车功能安全要求,是车载域控制器的理想选择。
2、开发环境搭建(VSCode+MCUX)
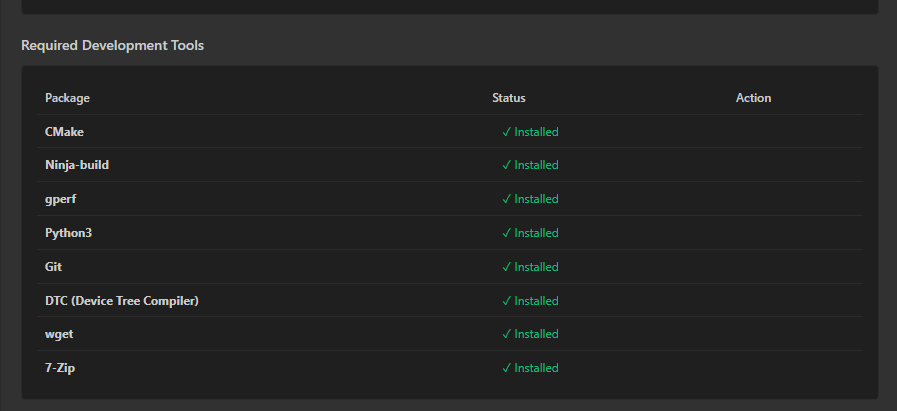
2.1 工具准备
推荐使用NXP MCUXpresso for VS Code扩展,插件已内置核心能力:
1. CMakePresets.json一键构建
2. SEGGER J-Link / LinkServer调试支持
3. 设备树可视化可直接预览 .overlay 文件
安装步骤:
1. 安装VS Code编辑器
2. 在扩展市场搜索并安装MCUXpresso for VS Code
3. 按插件引导安装west、Zephyr SDK、arm-none-eabi-gcc工具链
2.2 工程结构
使用CMakePresets.json管理构建配置,每个应用统一如下结构:
my_app/ ├── CMakeLists.txt ├── CMakePresets.json ← 指定 BOARD、构建目录 ├── prj.conf ← Kconfig 全局配置 ├── boards/ │ ├── imx93_evk_mimx9352_m33.overlay ← 板级 DTS 扩展 │ └── imx93_evk_mimx9352_m33.conf ← 板级 Kconfig 覆盖 └── src/ └── main.c
CMakePresets.json示例:
{ "configurePresets": [ { "name": "debug", "cacheVariables": { "BOARD": "imx93_evk/mimx9352/m33", "CMAKE_BUILD_TYPE": "debug" } } ] }
在VSCode中,点击底部状态栏的Build按钮即可完成编译,无需手动敲命令。
3、设备树Overlay:Zephyr的硬件描述核心
Zephyr通过Devicetree描述硬件,板级差异通过.overlay文件叠加,无需修改官方主DTSI文件,这也是 Zephyr 高可移植性的核心设计。
RTC 外设的Overlay 描述
RTC(实时时钟)是工业与消费电子产品中必不可少的外设。在Zephyr中,外部RTC芯片通过I2C总线挂载,并在.overlay文件中完整描述其连接关系,应用层只需调用统一的RTC API,无需关心底层硬件差异。
以i.MX93 EVK接入EPSON RX8010为例,overlay需要做两件事:启用I2C控制器并添加RTC子节点,同时通过aliases让上层应用找到该设备:
/* boards/imx93_evk_mimx9352_m33.overlay */ &lpi2c3 { status = "okay"; clock-frequency = ; /* 400 kHz */ pinctrl-0 = <&i2c3_default>; pinctrl-names = "default"; rx8010: rx8010@32 { compatible = "epson,rx8010"; /* 匹配驱动 binding */ reg = <0x32>; /* I2C 设备地址 */ status = "okay"; }; }; / { aliases { rtc = &rx8010; /* 应用通过 "rtc" 别名访问 */ }; };
应用代码中只需:
const struct device *rtc = DEVICE_DT_GET(DT_ALIAS(rtc)); struct rtc_time tm = { .tm_year = 125, .tm_mon = 3, .tm_mday = 20 }; rtc_set_time(rtc, &tm); rtc_get_time(rtc, &tm);
可移植性体现:若将RX8010更换为其他Zephyr支持的 RTC芯片(如DS3231、PCF8563),只需修改overlay 中的compatible和reg,应用代码零改动。
4、驱动验证实践
本节展示在i.MX 93开发板的M33核上已完成验证的PWM驱动样例。
样例:pwm_api—使用TPM2 控制器输出PWM信号
我们通过Import Example from Repository导入pwm_api项目后
overlay只需声明别名:
/* boards/imx93_evk_mimx9352_m33.overlay */ / { aliases { pwm-test = &tpm2; }; };
Kconfig 配置:
/* boards/imx93_evk_mimx9352_m33.overlay */ CONFIG_PWM=y
测试通过pwm_set_cycles()/pwm_set()设置占空比,可用示波器验证输出波形。i.MX93的TP(Timer/PWM Module)直接映射到Zephyrnxp,kinetis-tpm驱动,无需任何自定义代码。
5、Zephyr 开发中的常用调试技巧
5.1 Kconfig配置检查
Vscode中project文件中
debug/zephyr/.config 为项目最终合并后的config内容。
5.2 设备树最终输出检查
Vscode中project文件中
debug/zephyr/zephyr.dts 为项目最终合并后的dts内容。
这是排查overlay合并是否生效的最直接方式。
5.3 日志级别
CONFIG_I2C_LOG_LEVEL_DBG=y# 开启 I2C 驱动调试日志
5.4 ztest 测试框架
所有驱动样例均使用ztest框架,运行后通过串口输出结果。以PWM测试为例,烧录后串口输出如下:
*** Booting Zephyr OS build v4.1.0 *** Running TESTSUITE pwm_basic =================================================================== START - test_pwm_nsec [PWM]: 0, [period]: 2000000, [pulse]: 1000000 [PWM]: 0, [period]: 2000000, [pulse]: 2000000 [PWM]: 0, [period]: 2000000, [pulse]: 0 PASS - test_pwm_nsec in 3005 ms START - test_pwm_cycle [PWM]: 0, [period]: 64000, [pulse]: 32000 [PWM]: 0, [period]: 64000, [pulse]: 64000 [PWM]: 0, [period]: 64000, [pulse]: 0 PASS - test_pwm_cycle in 3003 ms =================================================================== TESTSUITE pwm_basic succeeded
输出说明:
test_pwm_nsec:以纳秒为单位依次设置 50% 占空比(1.65V)、100%占空比(3.3V)、0%占空比(0V),每步保持1秒
test_pwm_cycle:以cycle为单位重复上述三种占空比验证,period=64000cycle,pulse依次为32000/ 64000/0
每条[PWM]行对应一次
pwm_set()/pwm_set_cycles()调用,可用示波器或万用表在TPM2输出引脚上验证实际电压。
总结
通过本次i.MX93 M33核的Zephyr移植实践,我们验证了:Zephyr原生的应用pwm_api在i.MX 93 M33核的支持过程。
Zephyr 的核心价值在于:
1.一套驱动API,覆盖所有平台——更换SoC只改overlay,不改应用代码;
2.设备树驱动开发——硬件配置与软件逻辑清晰分离;
3.完整的测试基础设施——ztest+testcase.yaml支持 CI/CD集成;
4.安全与低功耗原生设计——不是后期补丁,是系统基础设施;
5.活跃的上游社区—— 全球超1600名贡献者,每周数百次代码合并。
飞凌嵌入式OK-MX9352-C开发板基于NXP i.MX93设计开发,是一款高性能工业级硬件平台,与Zephyr RTOS适配性优异、稳定性出众,借助Zephyr的工程化能力,开发者可在飞凌嵌入式OK-MX9352-C开发板上快速完成外设驱动开发、系统移植与功能验证,大幅缩短工业产品的研发与量产周期。
对于嵌入式RTOS选型、工业级产品开发的团队而言,飞凌嵌入式OK-MX9352-C开发板+Zephyr RTOS是兼顾开发效率、系统安全与硬件可靠性的优选方案。
-
嵌入式
+关注
关注
5209文章
20678浏览量
337188 -
NXP
+关注
关注
61文章
1411浏览量
199344 -
RTOS
+关注
关注
25文章
871浏览量
123222 -
Zephyr
+关注
关注
1文章
62浏览量
6635
发布评论请先 登录
NXP基于i.MX 91应用处理器打造的FRDM i.MX 91开发板特性参数详解

米尔NXP i.MX 91核心板发布,助力新一代入门级Linux应用开发
i.MX评估板和开发板官方资源大全:一键获取,拿走不谢!


NXP开发板有哪些?基于NXP i.MX 6UL、i.MX 8M Mini、i.MX 8M Plus、LS1028A的开发板概述

重新定义入门级嵌入式处理器模组-米尔NXP i.MX 93核心板

i.MX Linux开发实战指南—基于野火i.MX系列开发板
NXP推出FRDM i.MX 93开发板, 助力现代工业与边缘智能开发

恩智浦推出FRDM i.MX 93开发板
NXP首款搭载MPU的FRDM产品怎么样?FRDM i.MX93开发板开箱速览

NXP i.MX 93 开发板#提供高效的机器学习 支持高能效的边缘计算
NXP i.MX 91开发板#支持快速创建基于Linux®的边缘器件

FRDM i.MX 9平台选型指南:FRDM i.MX 9系列开发平台解析




评论