 谁在重塑工业机器人的未来?
谁在重塑工业机器人的未来?

图源:jcomp/freepik.com
机
器
人
无论是在外科手术还是在制造车间,机器人都越来越多地成为日常生活和工业领域的一部分。根据机器人行业的统计数据,现在88%的企业计划在其组织中投资增加机器人技术,全球约有300万个工业机器人在使用中,另外,每年将有近40万个新机器人进入市场。
按收入计算,工业机器人行业的全球市值达到了438亿美元。其中,汽车行业使用的工业机器人是所有行业中最多的,截至2017年,该行业共有近90万个机器人在使用,2021年,汽车行业新安装了约9,782台机器人,这个数量每年还在不断增加。紧随汽车行业之后工业机器人使用量较多的是电气和电子行业以及塑料和化工行业。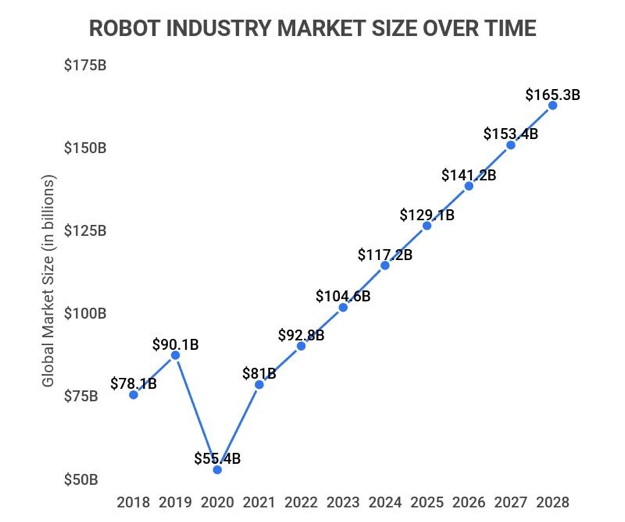
图1:机器人行业年度市场增长情况
(图源:Statista)
机器人的主要类型
市场上大多数的机器人都属于工业机器人,这些机器为人类做各种工作,包括制造汽车、制造零件,甚至进行外科手术。根据市场调研公司的数据,约87%的公司使用的是传统工业机器人,而74%的公司使用的是AGV(自动导引车)。
经过几十年的发展,工业机器人形成了较多的品类,归纳起来主要有固定机器人、自主移动机器人(AMR)、自动导引车(AGV)以及飞行机器人(无人机)和水下机器人等。
固定机器人(机械臂)
这是一种发展最早、应用最广泛的工业机器人。一般来说,固定机器人是专为拾取和放置、分拣、组装、焊接和精加工等任务而设计的机械臂。根据特性和用途划分,目前市场上有七种主要类型的固定机器人,包括:铰接式机械臂、笛卡尔或矩形机器人、SCARA机器人、球形机器人、德尔塔机器人、圆柱形机器人、协作机器人等。
下面我们将就这些机器人的具体特性以及优缺点加以区分。
图源:jcomp/freepik.com
01
铰接式机械臂
对于工业机器人来说,复制人类手臂和手的所有细微移动方式将过于昂贵和复杂。目前业界的共识是,工业机器人手臂的6个自由度将足以完成几乎任何需要的任务,或者说,一个典型的铰接式机械臂有六个轴或关节。
根据应用和制造商的不同,这个数量可能有所不同。当然,机器人的关节越多,其运动就越平稳,也就越不像“机器人”。优点:动作灵活,能够举起重物;缺点:可能需要用栅栏隔开,速度较慢,比其他机械臂更贵,需要更复杂的控制系统。02
笛卡尔或矩形机器人
这些机器人使用笛卡尔坐标系(X、Y和Z)沿着三个轴(向前和向后、向上和向下以及左右)进行线性运动。所有三个关节都是平移的,这意味着关节的运动被限制在一条直线上。
笛卡尔机器人可用于拾取和放置、材料处理、包装自动化、存储和检索、切割和钻孔以及更多应用。优点:控制系统简单。根据型号的不同,可以举起非常重的物体,且价格比铰接式机械臂便宜。缺点:不能做旋转运动。03
SCARA机器人
SCARA机器人与笛卡尔机器人相似,它们在3个关节或轴上移动。然而,与笛卡尔机器人相比,SCARA机器人的两个关节是旋转的。因此,它们能够进行比笛卡尔机器人更复杂的运动。
优点:适用于许多装配应用,快速准确,装配操作具有成本效益。SCARA机器人的工作包络是圆柱形的。缺点:不如铰接式机械臂灵活,不如笛卡尔臂精确,没有德尔塔机器人手臂那么快。04
球形机器人
球形机器人是一种较老的技术,创建于20世纪50年代的第一个工业机器人就是一个球形机器人。有时可以用铰接式机械臂取代。该种机器人由两个旋转关节和一个线性关节组成,可用于注塑、喷漆、电弧焊和点焊。
优点:控制系统比铰接式机械臂更简单,可以有很长的工作范围。缺点:不如铰接式机械臂灵活,通常需要相当大的占地面积。05
德尔塔机器人
德尔塔机器人也称为平行机器人,有三个平行四边形的机械臂,有时会在手臂末端放置旋转关节,以增加其运动的灵活性。该机器人最初的设计目的是让巧克力制造商能够拾取巧克力块并将其放入盒子中。
优点:用于拾取和放置操作的机械臂速度很快,关节和手臂非常轻,能实现高速和精确的操作。
缺点:不能携带重型有效载荷,限制了臂端工具(EoAT)的类型及其可以处理的任务,且不适合在垂直平面中处理任务。
06
圆柱形机器人
圆柱形机器人在底座上至少有一个旋转关节和两个线性关节。它通常用于狭小的工作空间,非常适合需要圆形对称的物体(如电线、管道),如磨削、装配和点焊等应用。
优点:精确度高。缺点:技术陈旧,运动灵活性有限。07
协作机器人(Cobot)
Cobot可在安全的工作环境中实现人机交互,而不需要围栏或传统工业机器人应用中采取的其他安全措施。
优点:能够安全地与人一起工作,且操作员能够在不必编写编程代码的情况下教机器人手臂进行动作,具体过程是操作员只需抓住机器人手臂,按照机器人需要的方式进行物理移动,然后,机器人手臂即可复制演示的动作。缺点:力量和速度有限,不适合重型应用或非常高速的任务。
自主移动机器人(AMR)
自主移动机器人代表了工业机器人市场中一个快速增长的细分市场,它们有多种形状和尺寸。手推车或带轮子的车辆形式的AMR通常用于在工厂或仓库设施内运输货物,它们配备了传感器、车载计算能力和电动机,使其能够在设施周围移动并创建设施的内部地图。一旦创建了内部地图,就可以向AMR指示其需要前往的目的地。
AMR的一个关键特征是,它们可以“自主”地从一个地方移动到另一个地方,同时避开沿途的障碍,甚至可以规划一条全新的路线到达目的地。随着计算机视觉、人工智能和抓取技术的进步,使得机器人对机器人(robot-to-robot)的协作成为可能。在这种情况下,轮式推车AMR将货物带到机械臂上,关节式机械臂再将货物放到指定位置。
自动导引车(AGV)
AGV通常采用带轮子的车辆形式,是一种比AMR更古老的技术。它们的机载智能较少,因此不如AMR那样具有自主性,不具备绘制设施地图的能力。相反,它们依赖于为自己制定的道路,路径由放置在地板上的导引线、特殊胶带或其他类型的导轨定义。如果AGV在行驶途中遇到障碍,它只能停下来寻求帮助。随着AGV被赋予了更多的车载计算能力,AGV和AMR之间的区别正变得越来越模糊。
压力传感器在医疗电子中的应用非常广泛,可用在输液泵、血压计和睡眠呼吸暂停机等设备中。TE的FX29是一种紧凑型压力传感器,在具有毫伏、模拟或数字输出信号的坚固的传感器系列中展现出了出色的性价比,并针对嵌入式力传感应用进行了优化,包括一次性医疗设备和健身器材。
飞行机器人(无人机)
无人机(UAV)正在越来越多地被用于各种工业目的。根据设计,工业无人机可以是一种自主移动机器人(AMR),一些型号能自动检测并避开障碍物,独立导航至目的地。现在,一些工业无人机被赋予了很多任务,包括飞越露天采矿作业或基础设施项目、监控建筑项目的进展、进行仓库库存管理等。
水下机器人
用于水下的机器人种类繁多,一些水下机器人被设计成自主的(自动水下航行器AUV),一些则被设计成有线或无线远程控制。水下机器人可用于海洋石油平台、管道的检查和科学研究,其他应用包括使用水下机器人检查桥梁底部、水电大坝进水口和珊瑚礁等。
工业机器人产业有多大?
人类的工作会被工业机器人取代吗?目前来看,只有那些重复性工作将逐渐被机器人所取代,而高智商、需要创造力的工作则很难被机器人代替。在快餐店做薯条、焊接、驾驶火车和回答基本的客户服务问题这些重复性工作对机器人来说相对容易接管。
据估计,到2025年,机器人将取代目前由人类占据的8,500万个工作岗位。由于机器人通常能胜任入门级职位所需的基本任务,这一变化也将为人类开辟更多高级管理岗位。
最近几年,机器人行业正以相对较快的速度增长,全球约有300万台工业机器人在使用中。另据Statista的数据,到2024年,全球工业机器人出货量预计将达到51.8万台,高于2020年的39.4万台。
根据2020年11月Reportlinker的一份报告,工业机器人在制造业和工业设施中的使用迅速扩大,是最大的机器人细分市场。预计到2025年将从2020年的766亿美元增长到1,768亿美元,复合年增长率为18.2%。这一增长主要是由制造商推动的。
工业机器人中的电机驱动与控制
机器人是一个多元化的行业,运动是机器人功能的一部分,电机可将机器人的运动势能转化为机械能。一些机器人的部件与人类相似,例如:手臂、手腕、手等。使用的主要运动形式包括:手臂的垂直、径向和旋转运动;手腕的俯仰、滚转和偏航;从一个地方移动到另一个地方的运动能力。
机器人的每个动作以及可移动部分都需要某种类型的电机支持。所使用的电机类型从注重转矩的交流电机到需要更多角度控制的步进电机。在两者之间,可选择有刷直流电机,这种电机具有成本效益且简单,但效率低且易磨损。
目前优秀的替代方案是采用无刷直流(BLDC)电机,它的效率更高,与使用机械开关的有刷电机相比,BLDC电机没有机械开关,而是使用带刷的旋转电枢进行电气连接。运动部件的减少使BLDC电机的使用寿命更长,仅受滚珠轴承磨损的限制。因为没有电刷,BLDC电机还表现出优异的耐用性和低噪声特性。德国航空航天中心的David机器人就拥有76个BLDC电机和165个位置传感器,它的工作速度和能力几乎与人类相当。
电机控制是一个非常活跃的研究领域,所有领先的半导体供应商都在不断开发新的产品以提供更高效的电机控制。
1►
STSTEVAL-SPIN3201
STMicroelectronics的STSPIN32F0无刷直流控制器是一款系统级封装器件,提供了适用于不同驱动模式的三相BLDC电机驱动方案。器件有三个半桥式栅极驱动,电流容量为600mA,能够驱动功率MOSFET或IGBT。由于集成的互锁功能,不能同时打开同一半桥的高、低侧开关。
此外,器件内部的3.3V DC/DC降压转换器可为MCU和外部元件供电,而其内部的LDO线性稳压器则可为栅极驱动器供电。集成的MCU(STM32F031C6)能够实现电机磁场矢量控制(FOC)、6步无传感器等其它先进的驱动算法,包括速度控制环等。同时,STSPIN32F0器件具有的过温和欠压锁定保护功能,可将器件置于待机模式,以减少功耗。
STEVAL-SPIN3201是一款基于STSPIN32F0和STD140N6F7 MOSFET的三相BLDC电机驱动板,为低压电机驱动应用提供了一种经济简易的解决方案。

图2:STEVAL-SPIN3201三相BLDC电机驱动板
(图源:STMicroelectronics)
BLDC提供了高效率,在许多应用中使用了出色的扭矩和速度值。扭矩代表电机的旋转力大小,BLDC的主要设计宗旨是优化转矩。速度和扭矩由瞬态的开/关持续时间比控制。通常,采用用于驱动绕组的PWM信号的形式。单相、两相和三相电机的使用使这种情况更加复杂。尤其是当控制器在低电流信号下工作时,电机需要高电流量。因此,电机驱动器要能够获取低电流控制信号,然后将其转换为可以驱动电机的高电流信号。
2►
TIDRV8313
Texas Instruments的DRV8313是一款最大电压为65V的3A峰值三相电机驱动器,提供三个可独立控制的半H桥驱动器。虽然也可被用于驱动螺线管或其它负载,但它主要用于驱动一个三相BLDC电机。每个输出的驱动通道包含采用半H桥配置的功率N-MOSFET。这个设计将每个驱动器的接地端子接至引脚,以在每个输出上执行电流感测。此外,该器件还具备过流保护、短路保护、欠压闭锁和过温保护的内部关断功能。

图3:DRV8313评估版为在梯形换向中运行三相BLDC电机提供了一种经济高效的无传感器解决方案(图源:Mouser)
电机驱动器的目标是确保正确的电机控制,以便在应用中相应地控制电机的速度和方向。微控制器(MCU)非常适合用于开发直流(和交流)电机高效控制回路所需的计算功能。
3►
Renesas RL78/G14
现在,许多半导体供应商开始大量提供以BLDC电机控制为目标的MCU,例如,Renesas Electronics的RL78/G14系列微控制器(MCU)就是一款多功能通用微控制器,适合用于电机控制、工业和计量应用,在低功耗电流和高计算性能之间实现了平衡。RL78/G14 MCU的内置多功能定时器通过三相互补PWM输出支持三相电机控制。此外,RL78/G14系列还集成了片上振荡器、数据闪存、模数转换器和数模转换器以及比较器等电路。

图4:RL78/G14系列微控制器
(图源:Renesas Electronics)
人工智能与工业机器人
人工智能可能会给工业机器人带来更强的自主性,使它们能够在零人工输入的情况下自我纠正、学习和改进,从而提升机器人在行业中的价值。遗憾的是,截至2021年,我们在行业中还无法看到真正的人工智能机器人。不过,Market research Future(MRFR)的一份综合研究报告《人工智能机器人市场按产品、类型、技术和应用——2030年预测》则给出了乐观的估计,报告预计人工智能机器人市场将在2022年至2030年期间以约22.30%的复合年增长率快速增长,到2030年底估值将达到约445亿美元。
人工智能和其他技术进步将增强人与机器人的互动,在涉及机器智能、连接和控制的技术方面迅速取得突破将扩大机器人的能力和范围,同时简化人机交互。在最有前途的创新中,人工智能将使机器人能够处理无人监督的意外情况。同时,群体智能将增加移动机器人在位置上共享和更改任务的灵活性。成像系统将增强机器人的自主检查、分析和移动能力。机器人技术具有巨大的上行潜力,人工智能机器人的能力会更加令人惊叹。
该发布文章为独家原创文章,转载请注明来源。对于未经许可的复制和不符合要求的转载我们将保留依法追究法律责任的权利。
关于贸泽电子
贸泽电子(Mouser Electronics)是一家全球知名的半导体和电子元器件授权代理商,分销超过1200家品牌制造商的680多万种产品,为客户提供一站式采购平台。我们专注于快速引入新产品和新技术,为设计工程师和采购人员提供潮流选择。欢迎关注我们!
更多精彩

原文标题:谁在重塑工业机器人的未来?
文章出处:【微信公众号:贸泽电子】欢迎添加关注!文章转载请注明出处。
-
贸泽电子
+关注
关注
17文章
1221浏览量
100392
原文标题:谁在重塑工业机器人的未来?
文章出处:【微信号:贸泽电子,微信公众号:贸泽电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人TOP1,切入人形机器人赛道,意欲何为?

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
变焦、高速、高清:索尼FCB-ER9500机芯如何重塑机器人视觉
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
遨博机器人以 “更专业更智能” 破局,让机器人从工业走向生活
什么是机器人?追溯机器人技术的演变和未来

工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

智造未来:工业机器人关键技术突破与场景化应用趋势
工业机器人的特点
工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
工业机器人与协作机器人概念不同

工业机器人的未来发展方向:富唯智能以具身智能重构人机协作新范式
EtherCAT科普系列(7): EtherCAT技术在工业机器人控制系统领域的应用




评论