 手把手教你使用LabVIEW人工智能视觉工具包快速实现图像读取与采集
手把手教你使用LabVIEW人工智能视觉工具包快速实现图像读取与采集

前言
今天我们一起来使用LabVIEW AI视觉工具包快速实现图像的读取与颜色空间转换、从摄像头采集图像。工具包的安装与下载方法可见之前的两篇博客。
一、工具包位置
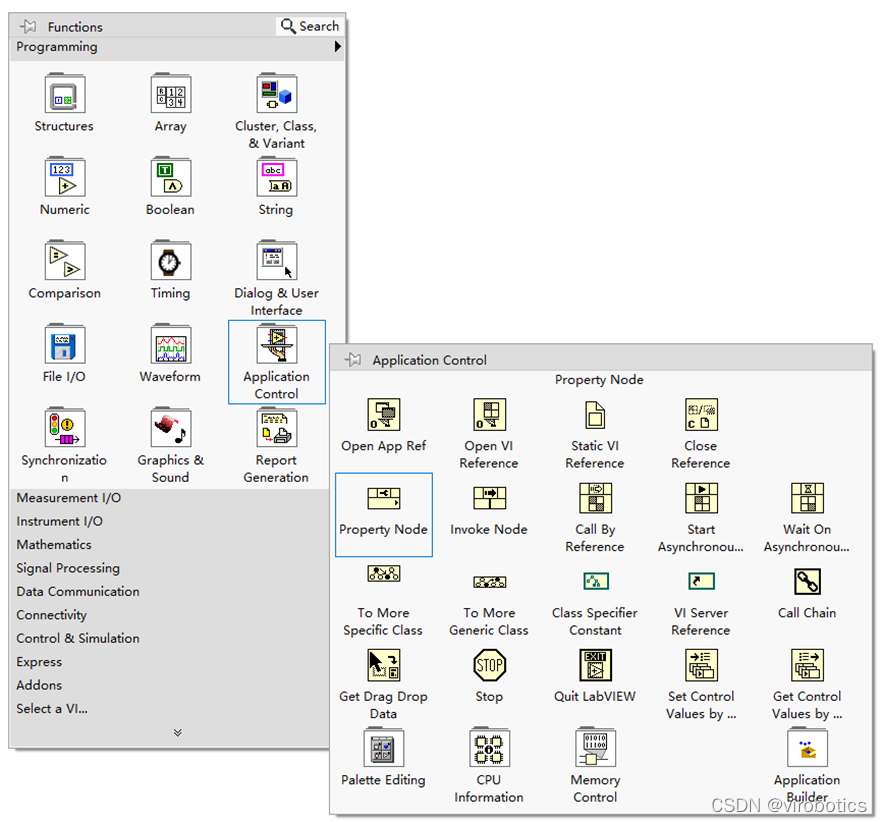
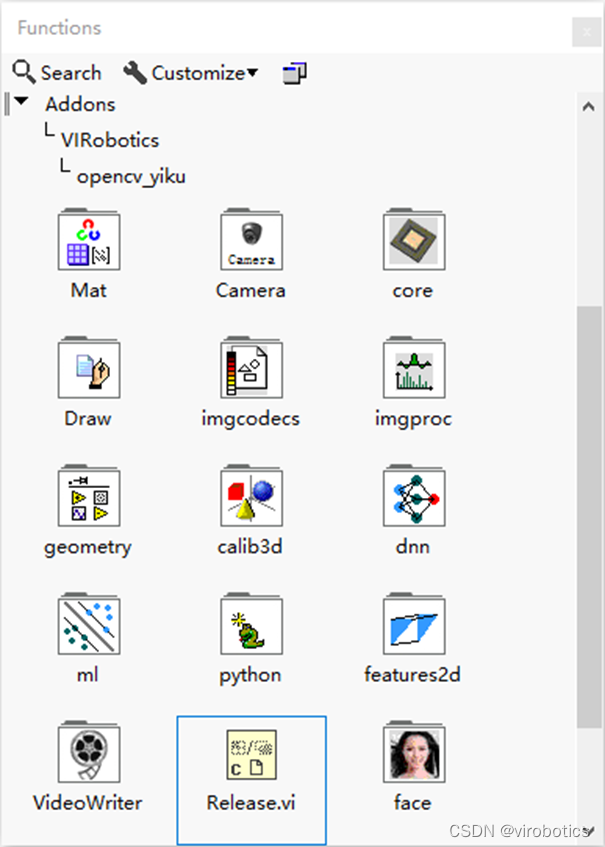
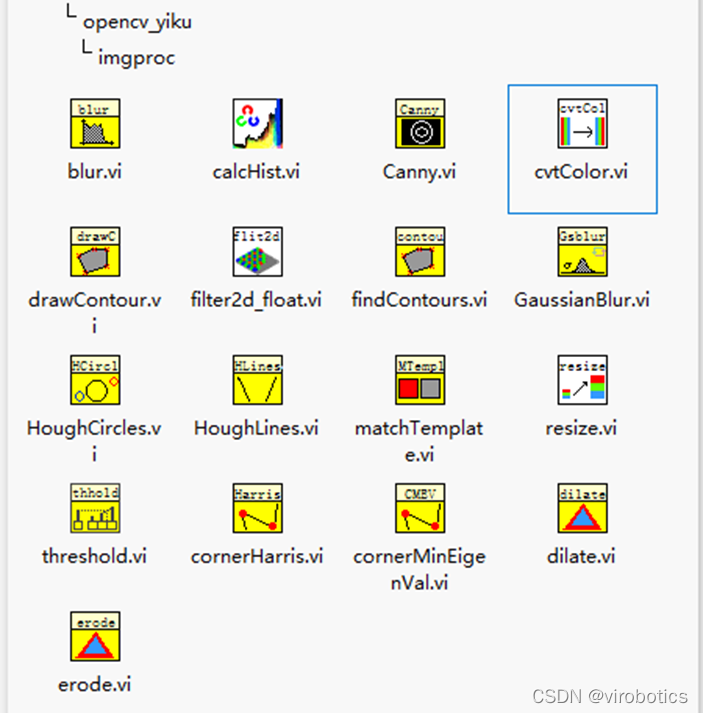
已经安装好的工具包位于程序框图-函数选板-Addons-VIRobotics-opencv_yiku,内容包括:Mat类型(矩阵)的操作、摄像头采集、图片文件读写、基本算子、视频生成、神经网络调用等功能。

二、图像采集与色彩空间转换
1.文件读写
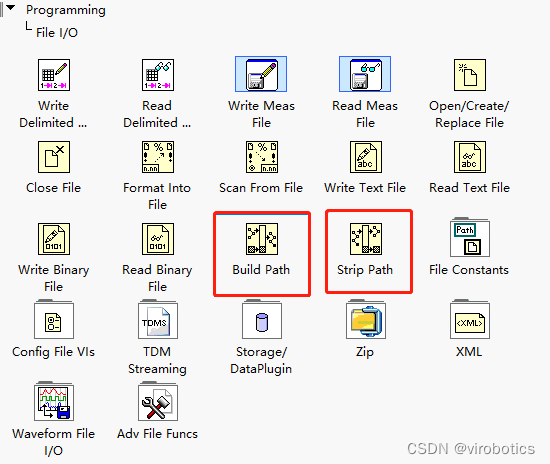
(1)程序框图面板右键:File I/O,拖出拆分路径和拼接路径函数到程序框图面板待用;
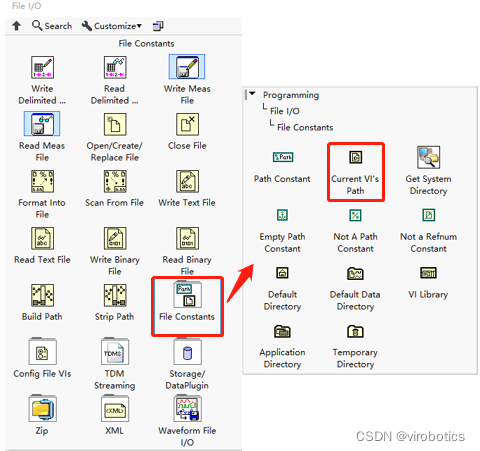
(2)程序框图面板右键:File I/O -->File Constants,拖出当前路径函数到程序框图面板待用;
2.实现图片读取
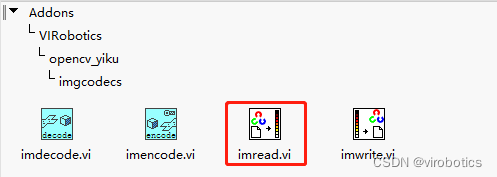
(1)在程序框图面板空白处右键-->在函数选板-->Addons-->VIRobotics-->opencv_yiku-imgcodes中找到要使用的imread函数,拖出;
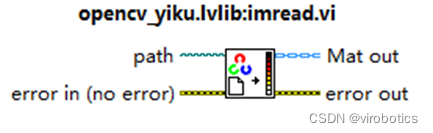
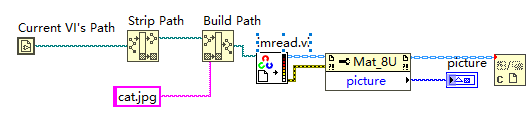
(2)imread函数读取指定路径的图片(jpg/png/bmp格式),返回Mat对象,具体输入输出如下所示:
(3)程序框图面板右键:Application Control-->Property Node,将属性节点拖出,用来获取Mat对象中的各种参数(本例中是图片),并放到图片控件中;
(4)释放Mat资源;
(5)按照下图所示连接,将待读取的图片与此vi置于同一路径下并运行;
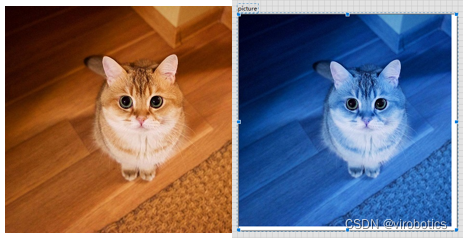
(6)读取图片如下图所示(左侧为原图,右侧为读取出来的图片),我们发现读取的图片颜色和原图不一样;
3.使用算子cvtColor实现颜色空间转换
(1)因为LabVIEW中的图像排列顺序是RGB,opencv中的图像排列顺序是BGR,所以读取出来的图片颜色和原图不一样;
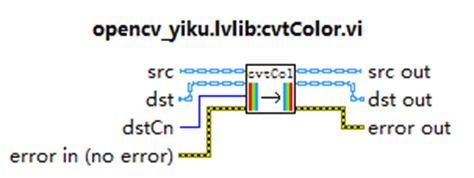
(2)使用算子cvtColor进行颜色空间转换,程序框图面板右键: Addons-->VIRobotics-->opencv_yiku-->imgproc: cvtColor ,拖出;
(3)算子cvtColor的输入与输出如下图所示:
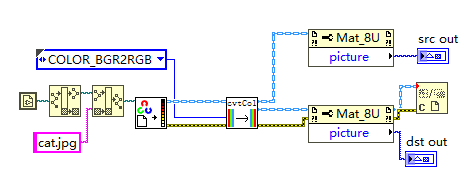
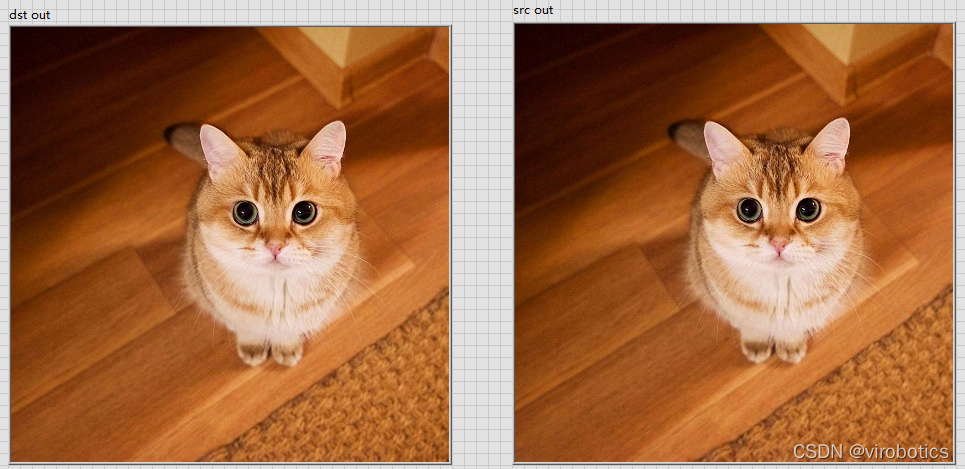
(4) LabVIEW中算子(cvtColor)的使用方式一 :输入的dst端不接输入,运行函数后输出的图片会替换掉原来的图片(src out和dst out的值一致),程序及结果如下图所示:
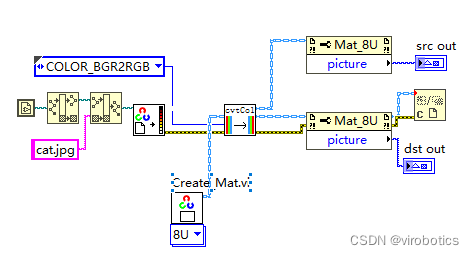
(5) LabVIEW中算子(cvtColor)的使用方式二 :输入的dst端接一个Create_Mat,即新建一个mat对象,运行函数后,dst的内容不会影响src的内容;程序及结果如下图所示:

三、从摄像头采集图像
1.Camera类
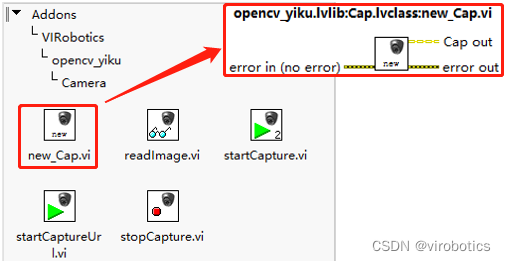
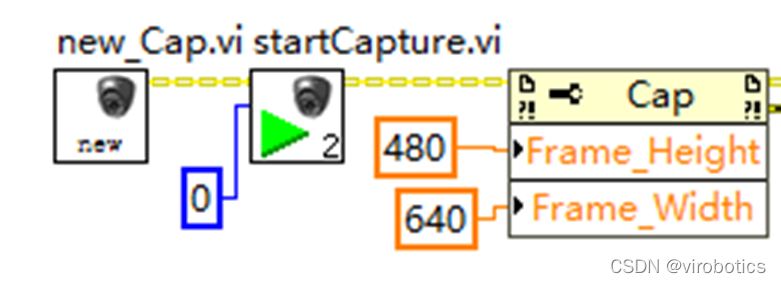
(1)新建一个vi,在程序框图面板右键:Addons-->VIRobotics --> opencv_yiku: Camera。找到摄像头初始化函数new_Cap,函数右上角输出Cap,是使用摄像头前的必备动作,将其拖至面板空白处备用;
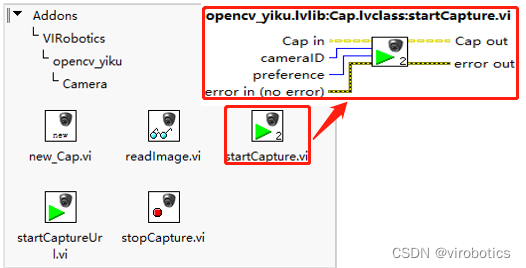
(2)在程序框图面板右键:Addons-->VIRobotics --> opencv_yiku: Camera。找到startCaptura,将其拖至面板空白处,使用该函数若只填写camerID时,请保障摄像头正常。只要连接有preference,则有多个本地摄像头时,优先使用分配到该ID的摄像头,若该摄像头不存在,则使用其它摄像头。
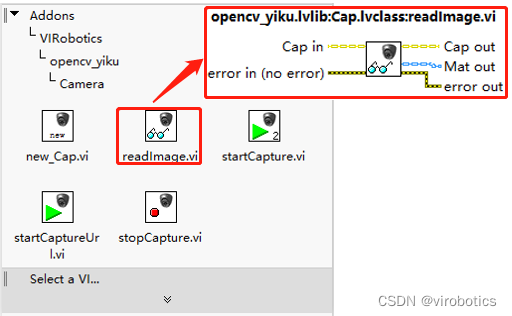
(3)在程序框图面板右键:Addons-->VIRobotics --> opencv_yiku: Camera。找到获取图像函数readImage,接在打开摄像头之后,用以获取摄像头拍摄的图像。 Mat输出图像(矩阵);
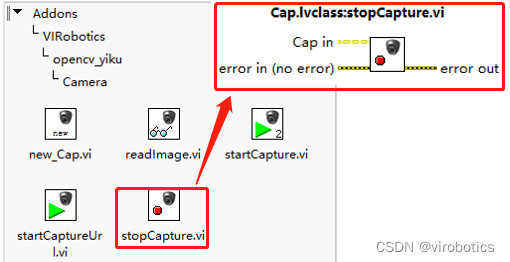
(4)在程序框图面板右键:Addons-->VIRobotics --> opencv_yiku: Camera。找到停止拍摄函数stopCapture,接到程序最后,释放摄像头资源,若不操作,可能会造成下一次使用不便。
2.属性节点
(1)程序框图面板右键:Application Control : Property Node,拖出,接至startCaptura之后
(2)根据摄像头实际支持的分辨率设置宽高。属性的箭头在右侧表示读取,只需右键选择Change To Write即可修改为写入。
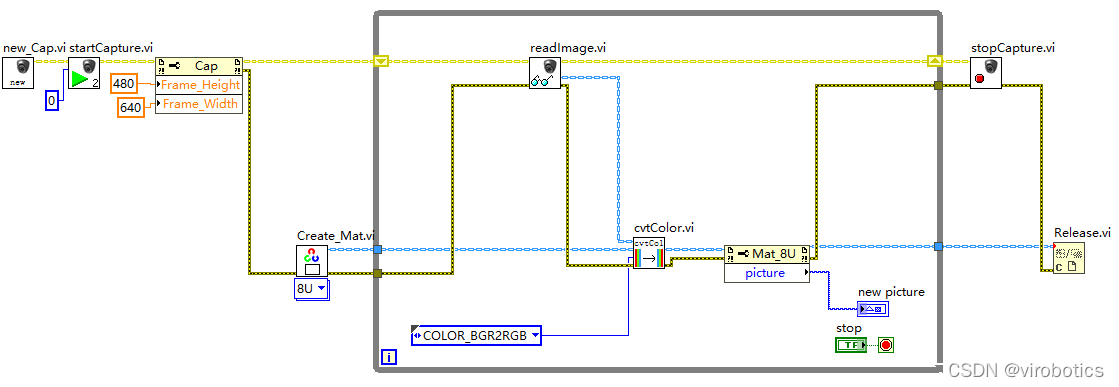
3.实现摄像头采集图像
整体程序如下,使用循环采集图像,点击stop按钮,循环结束,整个程序结束并释放资源。
四、源码下载
链接:https://pan.baidu.com/s/1TEihgoG5bIFz1SRCIab-mQ
提取码:8888
总结
更多关于LabVIEW与人工智能技术,可添加技术交流群进一步探讨。
审核编辑 黄宇
-
LabVIEW
+关注
关注
2025文章
3692浏览量
349477 -
人工智能
+关注
关注
1821文章
50547浏览量
267924
发布评论请先 登录
【K230/K230D 新技能点亮】手把手教你在RTOS系统添加一个屏幕|保姆级教程

BNC连接器规格尺寸避雷指南:手把手教你避开选型常见坑

射频头坏了只能扔?手把手教你维修排查TNC插头,干货值得收藏!

手把手教你学51单片机-C语言版
【精选活动】缺陷系统检测不走坑!10年+资深LabVIEW视觉专家全套珍藏

从0到1,10+年资深LabVIEW专家,手把手教你攻克机器视觉+深度学习(5000分钟实战课)
迅为Hi3403开发板极速启航 | 手把手带你玩转核心例程,轻松上手AI视觉!

【迅为RK3568开发板NPU实战】别再闲置你的NPU!手把手教你玩转RKNN-Toolkit2 的使用
【RK3568 NPU实战】别再闲置你的NPU!手把手带你用迅为资料跑通Android AI检测Demo,附完整流程与效果

汽车软件团队必看:基于静态代码分析工具Perforce QAC的ISO 26262合规实践

挖到宝了!人工智能综合实验箱,高校新工科的宝藏神器
挖到宝了!比邻星人工智能综合实验箱,高校新工科的宝藏神器!
RT-Thread Nano硬核移植指南:手把手实现VGLite图形驱动适配 | 技术集结

【精选直播】手把手教你做PC第十二课:WIFI 驱动框架适配

【精选直播】手把手教你做星闪无人机第十课:KaihongOS Lite系统专题



评论