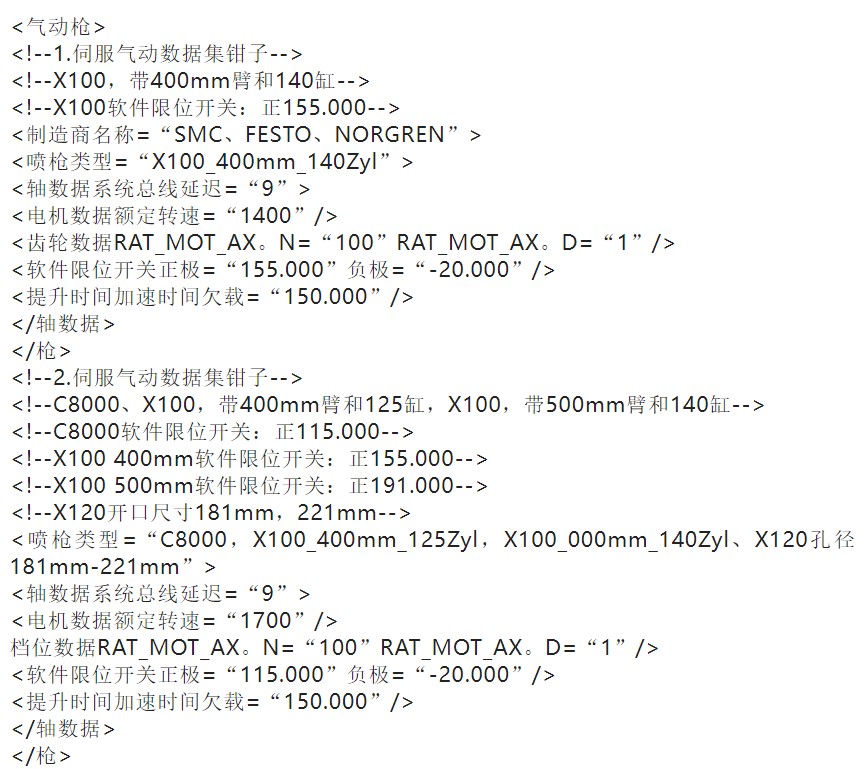
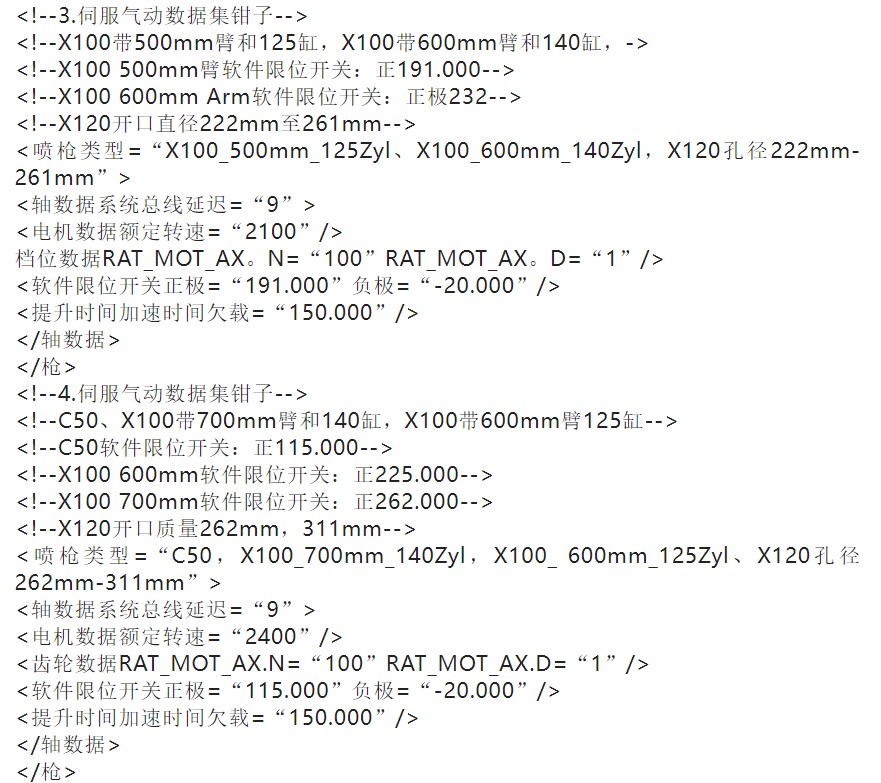
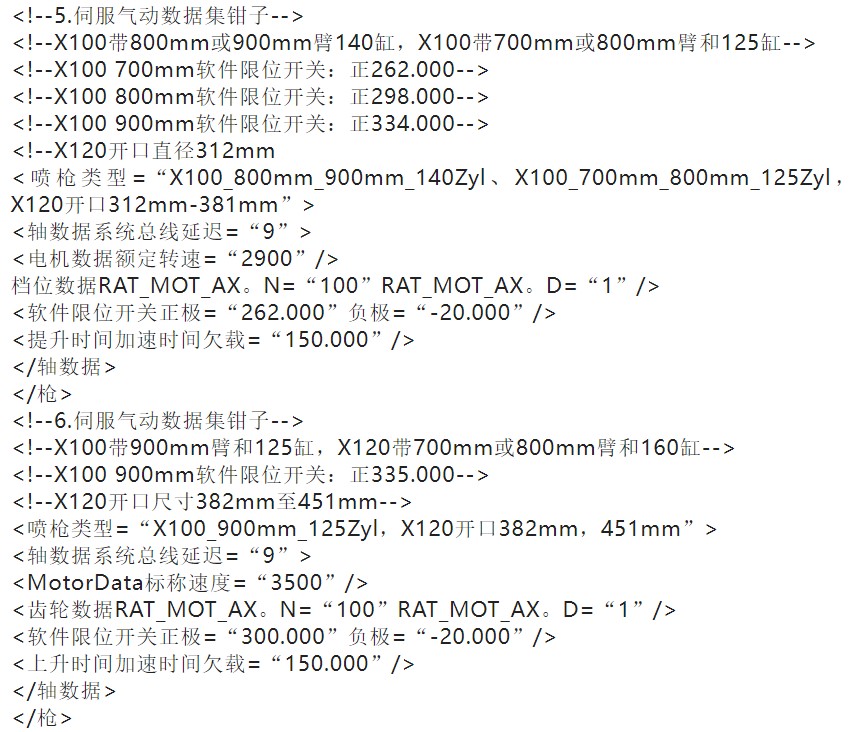
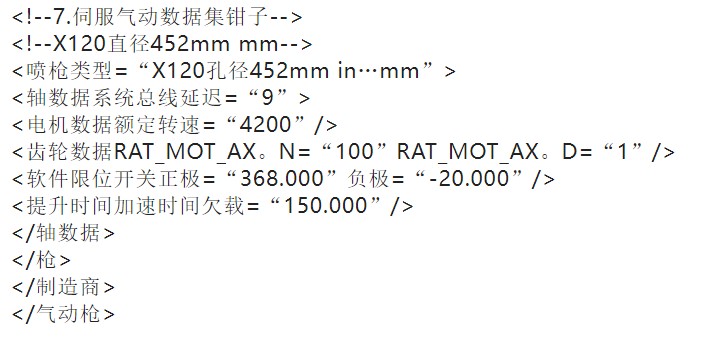
 浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件

FESTO气缸各型号
| Ø90-150 | A | J | K |
| Verschl.T.Satz | 761861 | ||
| Ersatz. AD | 761879 | ||
| Ersatz.WMS | 761862 | ||
| Ø100-160 | A | J | K |
| Verschl.T.Satz | 761863 | ||
| Ersatz. AD | 761880 | ||
| Ersatz.WMS | 761864 | ||
| Ø100-184 | A | J | K |
| Verschl.T.Satz | 761863 | ||
| Ersatz. AD | 761880 | ||
| Ersatz.WMS | 763053 | ||
| Ø125-90 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 761866 | ||
| Ø125-160 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 761864 | ||
| Ø125-184 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 763053 | ||
| Ø125-248 | A | J | K |
| Verschl.T.Satz | 761865 | ||
| Ersatz. AD | 761881 | ||
| Ersatz.WMS | 763054 | ||
| Ø140-150 | A | J | K |
| Verschl.T.Satz | 761873 | ||
| Ersatz. AD | 761874 | ||
| Ersatz.WMS | 761862 | ||
| Ø160-90 | A | J | K |
| Verschl.T.Satz | 761876 | ||
| Ersatz. AD | 761877 | ||
| Ersatz.WMS | 761866 | ||
| Ø160-150 | A | J | K |
| Verschl.T.Satz | 761876 | ||
| Ersatz. AD | 761877 | ||
| Ersatz.WMS | 761862 | ||
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31691浏览量
224635
原文标题:KUKA机器人气伺服焊钳虚拟外部轴的配置文件
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
发表于 07-15 07:48
KUKA库卡机器人伺服驱动器相关型号举例
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。
发表于 09-08 16:30
机器人系统与控制需求简介
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同机器人建模控制的本质区别关节型机械臂:串联垂直多关节6轴机器人SCARA机械臂:笛卡尔机械臂
发表于 09-08 07:44
KUKA根据伺服焊提示报警信息,寻找故障源.
机器人在执行焊接夹紧时出现故障,采用手动移动E1外部轴报错:“EMZ: Freigabe gesetzt”,焊钳不能移动,那是为什么呢?


简单介绍KUKA外部轴应用
对于旧的8.2X系统使用的外部轴插件是SynchroMove 对于最新8.3X系统 要分两种: WorkVisualAddOnVKR: 用于气伺服焊钳和其他软件控制电

KUKA机器人焊钳铣削清零方式
= (!F329 !F322 !F830) + (F830 A786) 计数器清数改为0 KUKA机器人对电极帽更换的清数方式: bin3 ( F64 ) = 1 1号焊钳对应的BOSCH bin3
VASS KUKA电伺服焊钳的SG_Background控制
SERVOZANGE (伺服钳):选择焊钳--在列表中只显示已激活选项 后台流程已激活 的焊钳。




评论