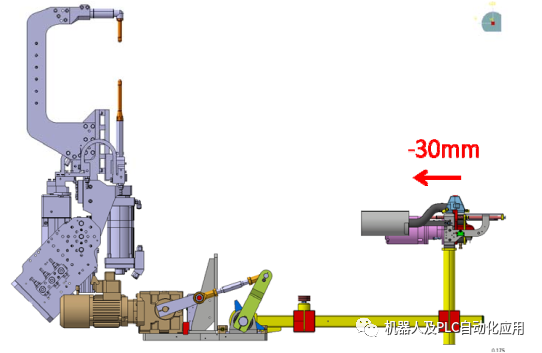
 KUKA机器人固定焊钳的铣削控制
KUKA机器人固定焊钳的铣削控制

常用IO信号:
A 786 焊接控制器铣削复位
A 842 摆臂伸出/返回 A834铣刀电机旋转A835铣刀吹气
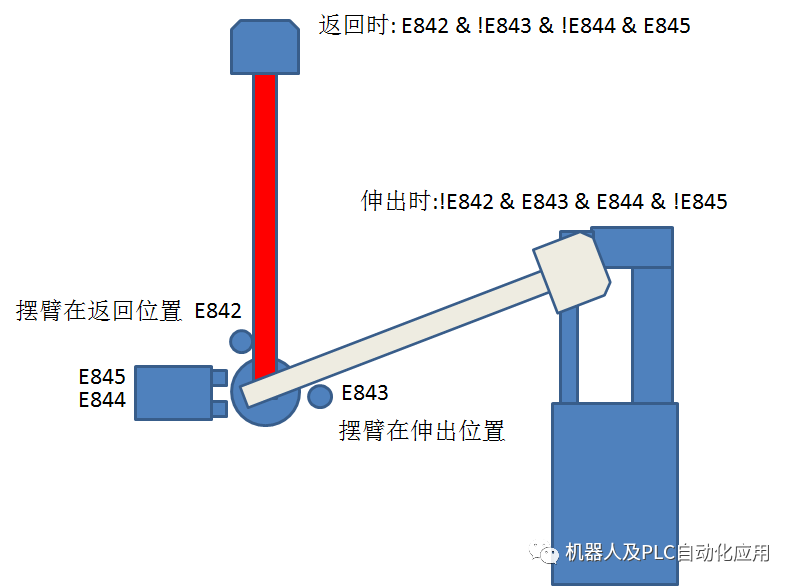
E842 摆臂在返回位置
E843 摆臂在伸出位置
E844 在回位的取反信号
E845 在伸出位的取反信号
E834 铣刀圈数检测
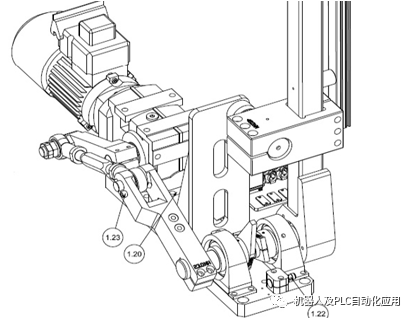
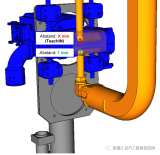
工作示意图:
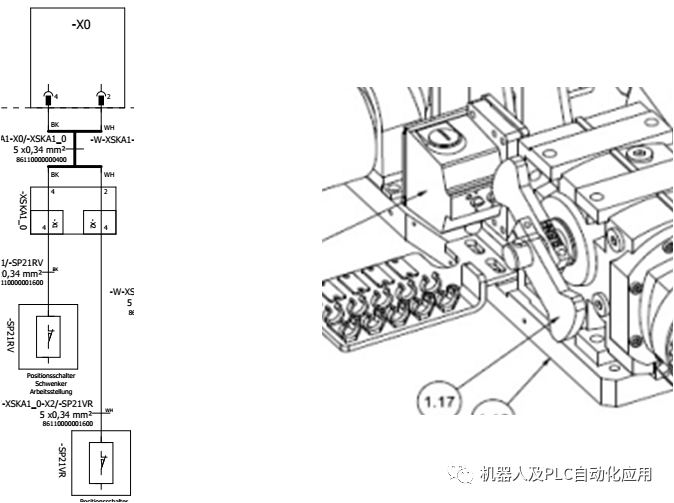
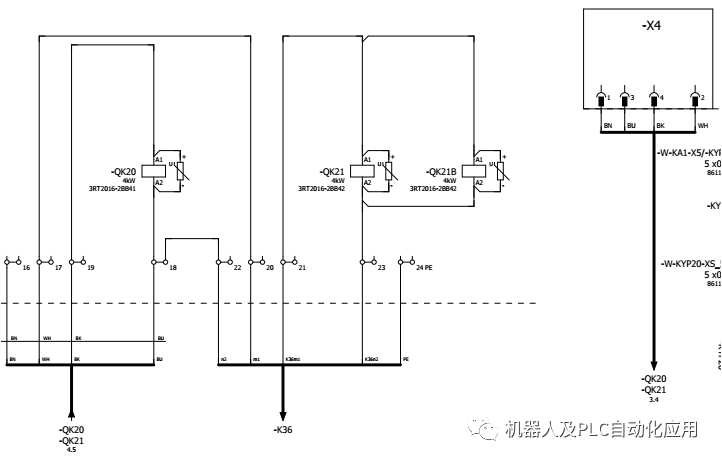
E845与E844的控制电器图:
O_KS1_M1=842 -A842铣刀旋转-
使用中断程序关闭铣刀旋转:
GLOBAL INTERRUPT DECL 2 WHEN $IN[I_关闭KS1_Ruhe] == FALSE DOKS_Abschalten()
当有E844时证明摆臂在伸出位置,这时会关闭电机旋转.
GLOBAL INTERRUPT DECL 3 WHEN $IN[I_KS1_Arbeit] == FALSEDO KS_Abschalten()
当有E845时证明摆臂在返回位置,这时会关闭电机旋转.
GLOBALDEFKS_Abschalten()
关闭摆臂电机
$OUT[O_KS1_KYP3V] = FALSE
$OUT[O_KS1_M1] = FALSE-A842电机旋转-
$OUT[O_KS1_Schw] = FALSE
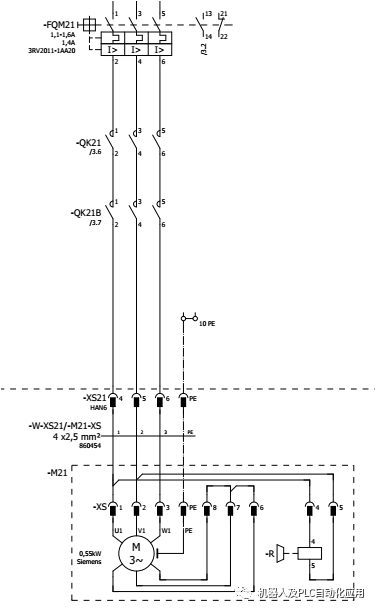
摆臂旋转电机采用双继电器控制:
固定焊钳MAKROSTEP:
-当有铣削时出现圈数故障时,会先把摆臂摆回,然后停在66步等待复位,如果复位会返回到第51部,重新铣削。
-F321-STEP在第2步
-F564,A835 都没有好使用
F321 = EIN
Schritt 51 = F92 & !F93& A4039 & E13–激活固定焊钳STEP需要关闭安全们E13
51步开始
-初始化变量
F122 = AUS
F321 = AUS
F322 = AUS
F323 = AUS
F324 = AUS
F325 = AUS
F326 = AUS
F327 = AUS
F329 = AUS
-初始化计数器变量
F94 = AUS
F95 = AUS
F96 = AUS
F97 = AUS
F98 = AUS
F99 = AUS
-初始化铣刀变量
F312 = AUS
F313 = AUS
bin1 ( EIN ) = 31 -给焊钳程序号
bin3 ( EIN ) = 31 –给BOSCH程序号
T8 ( !F334 ) = -2[1/10Sek]
F334 = EIN -STEP已经开始运行
-给PLC铣电极信号
A116 = EIN
A130 = EIN
A786 = F830 给BOSCH铣电极数复位,F830区分两种焊钳或控制器–一般不激活
A722 = !F830-没用用于
Schritt 52 = T8 & A4039 -0.2秒后向下
SCHRITT 52-铣刀电机预先旋转
F334 = AUS
T7 ( EIN ) = -50[1/10Sek] -5秒检测时间
i1 (EIN) = 0 -计数器清0
A834 = EIN -铣刀电机预先旋转
Schritt 53 = A4039 -有使能直接去下一步
-在焊钳不夹时铣刀电机先旋转测试检测开关,电机是否正常工作。
SCHRITT 53 预转大于2圈就可以
F312 = EIN -激活M97进行预先旋转测试
F313 = i1 > 2 -计数超过2圈后激活F313跳步
Schritt 54 = (F313 + T7) & A4039
SCHRITT 54—关闭铣刀预转
F312 = AUS 关闭M97预先旋转测试
t8 ( EIN ) = -100[1/10Sek]
Schritt 55 = A4039
-
控制器
+关注
关注
114文章
17882浏览量
195192 -
机器人
+关注
关注
213文章
31481浏览量
223724 -
电机
+关注
关注
145文章
9711浏览量
154823 -
信号
+关注
关注
12文章
2934浏览量
80419 -
焊接
+关注
关注
38文章
3590浏览量
63448
原文标题:KUKA机器人固定焊钳的铣削控制
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
KUKA机器人问题解答
KUKA库卡机器人伺服驱动器相关型号举例
KUKA焊接机器人伺服电机常见故障及维修处理
库卡机器人MGV电源模块维修
机器人系统与控制需求简介
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
KUKA机器人焊钳铣削清零方式
KUKA机器人程序中铣削清零方式
KUKA机器人铣削控制



评论