 KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析
KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析

C 4 机器人大众系统版本8.22 所使用配置 虚拟轴软件SynchroMove(版本:1.2.9)
软件中的数据库包括:
压铆钳 数据库
电伺服焊钳 数据库
铆接钳 数据库
气伺服焊钳 数据库
SynchroMove软件在 机器人D盘中的KUKA_OPT文件夹中。
1.与它相配合还要有相对应的USER用户程序组建,只要是标准用户程就行,不能和激光焊的标准组件混用。
2.必须是VW大众标准体系下的标准机体机器人才能安装成功,其它机体的机器人是不能安装此软件的.
3.必须安装ProConOS软PLC

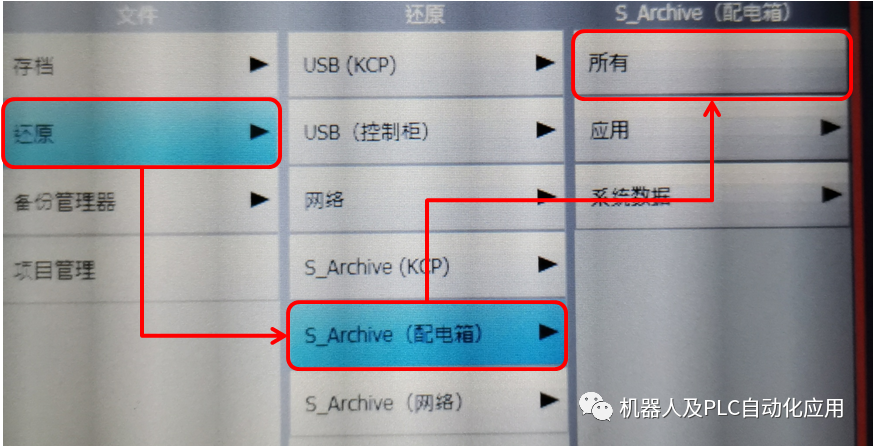
3.软件安装
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31697浏览量
224668 -
KUKA
+关注
关注
3文章
218浏览量
17539
原文标题:KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
的微小力矩,实现力/位混合控制。典型需求:分辨率达0.01Nm量级,带温度补偿,抗轴向串扰。
行走与平衡控制(下肢与髋、踝关节)
场景描述:在凹凸不平地面、斜坡或受到外部冲击时,机器人需快速调整足底
发表于 05-20 17:40
ZL30100 T1/E1系统同步器:功能特性与应用解析
ZL30100 T1/E1系统同步器:功能特性与应用解析 在电子设备的通信系统中,时钟同步是确保数据准确传输和系统稳定运行的关键因素。Zar
深入解析Renesas E1/E20模拟器:功能、使用与注意事项
深入解析Renesas E1/E20模拟器:功能、使用与注意事项 在嵌入式系统开发中,模拟器是不可或缺的工具,它能有效辅助工程师进行调试和开发工作。今天我们就来详细探讨Renesas E1
深入解析Renesas E1/E20 Emulator:从规格到调试全流程
深入解析Renesas E1/E20 Emulator:从规格到调试全流程 在嵌入式开发领域,调试工具的性能和易用性对项目的成功至关重要。Renesas E1/E20 Emulator
Renesas E1/E20 仿真器使用指南:从入门到精通
Renesas E1/E20 仿真器使用指南:从入门到精通 在嵌入式系统开发的领域中,仿真器是调试和验证 MCU(微控制器单元)程序不可或缺的工具。Renesas E1/
深入解析Renesas E1/E20 Emulator:硬件设计与调试的全方位指南
工程师们提供了高效、精准的调试体验。本文将深入探讨E1/E20 Emulator的各个方面,包括其规格、系统设计、调试准备、调试功能以及使用注意事项等,希望能为电子工程师们在实际应用中提
Renesas E1/E20 仿真器:设计与调试的全方位指南
: R5F21322CNSP#W4.pdf 一、仿真器规格 1. 目标 MCU E1/E20 仿真器支持 R8C 家族的多个系列,如 R8
Renesas E1/E20仿真器:全面解析与应用指南
Renesas E1/E20 仿真器:全面解析与应用指南 引言 在嵌入式系统开发领域,仿真器是不可或缺的工具之一。Renesas的E1/E2
瑞萨E1/E20仿真器:设计、调试与使用全解析
瑞萨E1/E20仿真器:设计、调试与使用全解析 在嵌入式系统开发中,仿真器是不可或缺的工具,它能帮助工程师高效地进行硬件调试和程序开发。瑞萨的E1/
深入了解Renesas E1/E20 Emulator:从规范到应用
的调试工具,它能帮助工程师更高效地开发和调试基于R8C Family的MCU项目。本文将详细介绍E1/E20 Emulator的规格、使用方法、调试功能以及使用时的注意事项,希望能对广大电子工程师有所
Renesas E1/E20 仿真器:设计与调试全解析
Renesas E1/E20 仿真器:设计与调试全解析 在嵌入式系统开发的广阔领域中,仿真器扮演着至关重要的角色,它是工程师们调试和优化代码的得力助手。Renesas E1/
探索RISC-V在机器人领域的潜力
应用,特别是机器人操作系统领域的可行性。MUSE Pi Pro以其强大的K1 AI CPU和官方对主流开源软件栈的积极适配,成为了一个非常有吸引力的选择。
二、 硬件初窥:性能小钢炮
MUSE Pi Pro
发表于 12-03 14:40
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
,MYD-LT536 具备以下突出优势:
1. 高算力与实时性兼顾
四核 Cortex-A55 架构可并行运行多线程控制任务,满足多轴机器人同步控制与动态补偿算法的实时计算需求;
T536 AMP多核
发表于 11-14 15:48
工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此发展工业
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动
发表于 06-11 14:30



评论