 简述KUKA外部轴的几种应用
简述KUKA外部轴的几种应用



对于旧的8.2X系统使用的外部轴插件是SynchroMove

对于最新8.3X系统
要分两种:
WorkVisualAddOnVKR:
用于气伺服焊钳和其他软件控制电伺服焊钳或其他伺服设备(由机器人以外设备控制伺服电机设备)例如:伺服铆钳,气伺服焊钳

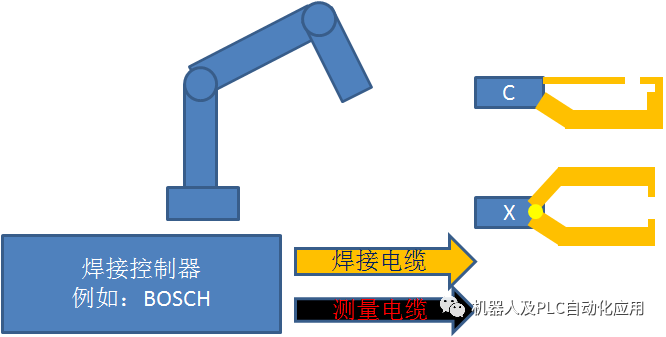
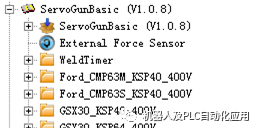
ServoGunBasic:

用于KUKA机器人直接供电控制使用,KSP供电控制使用。

WELDTIMER 分配与焊接控制器相 关联例如:BOSCH

ServoGun:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31633浏览量
224473 -
伺服电机
+关注
关注
88文章
2209浏览量
61656 -
KUKA
+关注
关注
3文章
218浏览量
17532
原文标题:简述KUKA外部轴的几种应用
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐

电机中D轴与Q轴的关系及不同工况下的运行特性
一、D轴与Q轴的核心关系 D轴与Q轴的本质是“正交坐标系”,核心关系围绕“磁场”与“转矩”的解耦控制展开,所有运行特性均基于以下两个核心原则,这也是理解二者关系的关键: 方向关联 :Q
单轴/多轴 Trinamic 电机驱动模块怎么选?
最近有工程师朋友在后台问我们:“同样是Trinamic电机驱动模块,单轴和多轴到底有什么不同?我的设备到底该选哪一种?”这个问题问得很到位。其实,单轴和多轴模块并没有绝对的“谁更好”,

六轴驱动,如何一步到位?TMCM-6214 的多轴控制!
多轴运动控制,听起来就让人头大:布线像蜘蛛网、编程像天书、控制柜挤得像沙丁鱼罐头。每增加一个轴,线缆多一堆,代码量蹭蹭涨,空间还得精打细算。一个模块搞定六个轴有没有一个模块能把六个轴的
多轴陀螺仪怎么选?
在无人机、机器人、VR等智能设备中,姿态传感器是感知运动的核心。面对市场上六轴、九轴、十轴等不同配置,该如何选择?本文以海凌科HLK-AS201系列为例,为你清晰解析三者的区别与选型要点。一、六

四轴无人机是如何工作的?
四轴飞行器、无人机——无论怎么称呼它们,这些小玩意儿都既迷人又好玩!对于喜欢DIY的人来说,组装一架四轴飞行器绝对是一个很棒的项目。但四轴飞行器究竟是如何工作的呢?它是如何飞行的?需要组装哪些部件

正确的连接电机传动轴的几种常见连接方式及其优缺点
在工业机械和自动化设备中,电机与传动轴的连接方式直接影响设备的运行效率、稳定性和使用寿命。选择合适的连接方式需要综合考虑负载特性、安装精度、维护便利性以及成本等因素。以下是几种常见的电机传动轴连接
GraniStudio:单轴Jog运动例程
1.文件运行 导入工程 双击运行桌面GraniStudio.exe。 通过引导界面导入单轴Jog运动例程,点击导入按钮。 打开单轴Jog运动例程所在路径,选中单轴Jog运动.gsp文件,点击

GraniStudio:获取轴信息例程
1.文件运行 导入工程 双击运行桌面 GraniStudio .exe。 通过引导界面导入获取轴信息运动例程,点击导入按钮。 打开获取轴信息例程所在路径,选中获取轴信息.gsp文件,点击打开,完成

GraniStudio:控制轴设置例程
1.文件运行 导入工程 双击运行桌面GraniStudio.exe。 通过引导界面导入控制轴设置例程,点击导入按钮。 打开控制轴设置例程所在路径,选中控制轴设置.gsp文件,点击打开,完成导入

GraniStudio:轴复位例程
1.文件运行 导入工程 双击运行桌面GraniStudio.exe。 通过引导界面导入轴复位例程,点击导入按钮。 打开轴复位运动例程所在路径,选中轴复位运动.gsp文件,点击打开,完成导入。 2.

舵机原理简述!
舵机原理简述 舵机是一种高精度的位置伺服执行机构,广泛应用于机器人关节、无人机舵面控制、航模操控等场景,其核心功能是通过接收控制信号,精确驱动输出轴旋转到指定角度并保持稳定。以下从结构组成、控制
adxl355读数异常,三轴中某一轴数据始终为0怎么解决?
z轴异常,xy正常),请问出现这种现象可能的原因是什么?拆装过程中过大的外部激励是否会导致这种现象,以及有什么解决方法?
发表于 08-13 07:32
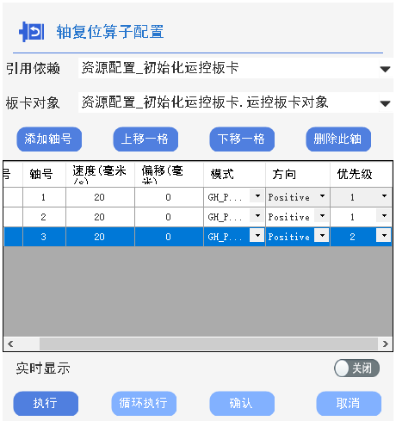
GraniStudio零代码平台轴复位算子支持多少个轴同时复位,有哪些回零模式?
GraniStudio平台在轴复位的功能上未对同时复位的轴数进行硬性限制,理论上支持任意数量轴同步复位,需要考虑的是在做多轴同步复位时要评估机械安全风险,建议提前确认机械在多
电机为什么会产生轴电流?
电机是现代工业中不可或缺的动力设备,广泛应用于各种机械系统中。然而,在电机的运行过程中,有时会出现一种被称为“轴电流”的现象,这种现象不仅会影响电机的正常运行,还可能导致设备的损坏。那么,电机




评论