 T3M系列宽带自组网电台多跳端到端速率测试
T3M系列宽带自组网电台多跳端到端速率测试

一、测试概述
配合客户测试T3M系列自组网电台在1跳、2跳、3跳、4跳、5跳链状拓扑条件下的最大传输速率。
二、测试环境
● 测试时间:2022年7月28日
● 测试地点:陕西西安清华科技园
● 测试设备:
| 序号 | 名称 | 品牌 | 型号 | 数量 |
| 1 | MESH电台 | 西安跳跳通 | T3M2 | 5 |
| 2 | 笔记本电脑 | 2 |
三、测试方法
将所有测试电台的发射功率调整为10mw,在办公楼消防通道依次布设,分别形成1跳、2跳、3跳、4跳、5跳等多跳中继的链状拓扑网络,使用iperf3工具进行灌包测试,测试最大传输速率。
四、测试结果
| 跳数 | 1跳 | 2跳 | 3跳 | 4跳 | 5跳 |
| 传输速率 | 90.5Mbps | 45.4Mbps | 26.2Mbps | 14.7Mbps | 9.9Mbps |
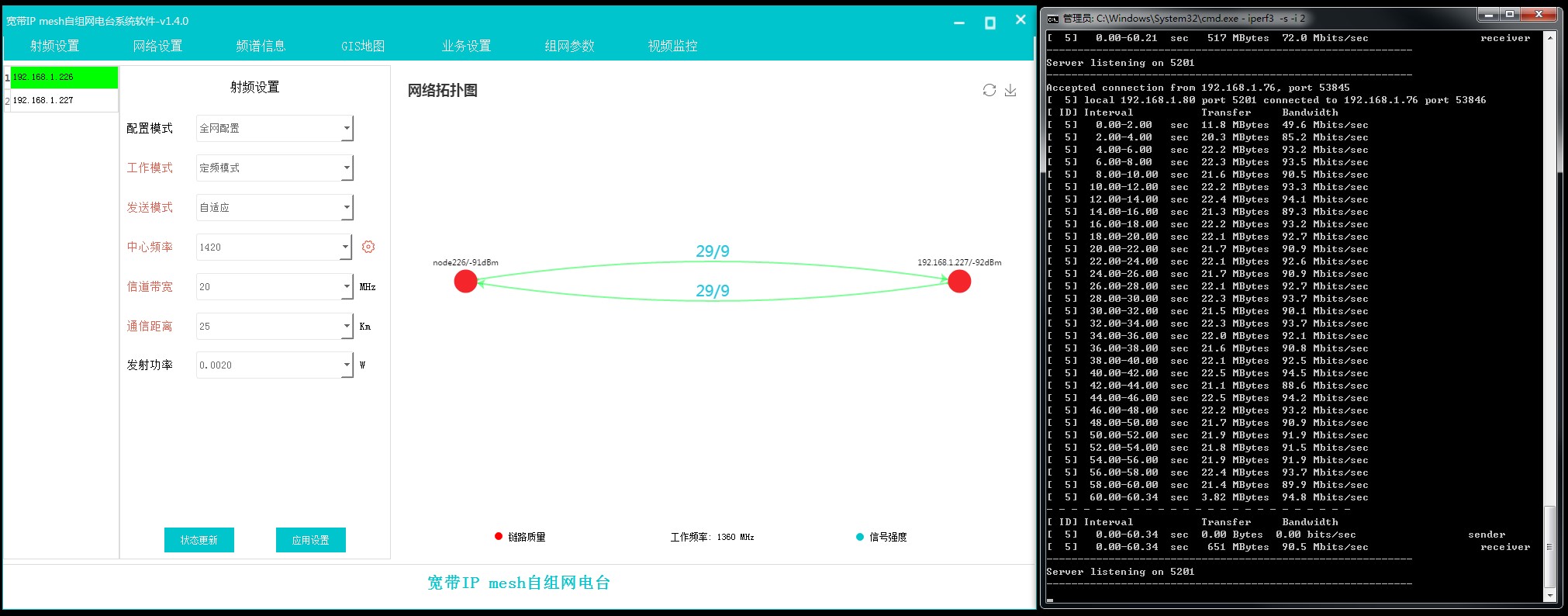
1跳测试(2个节点)
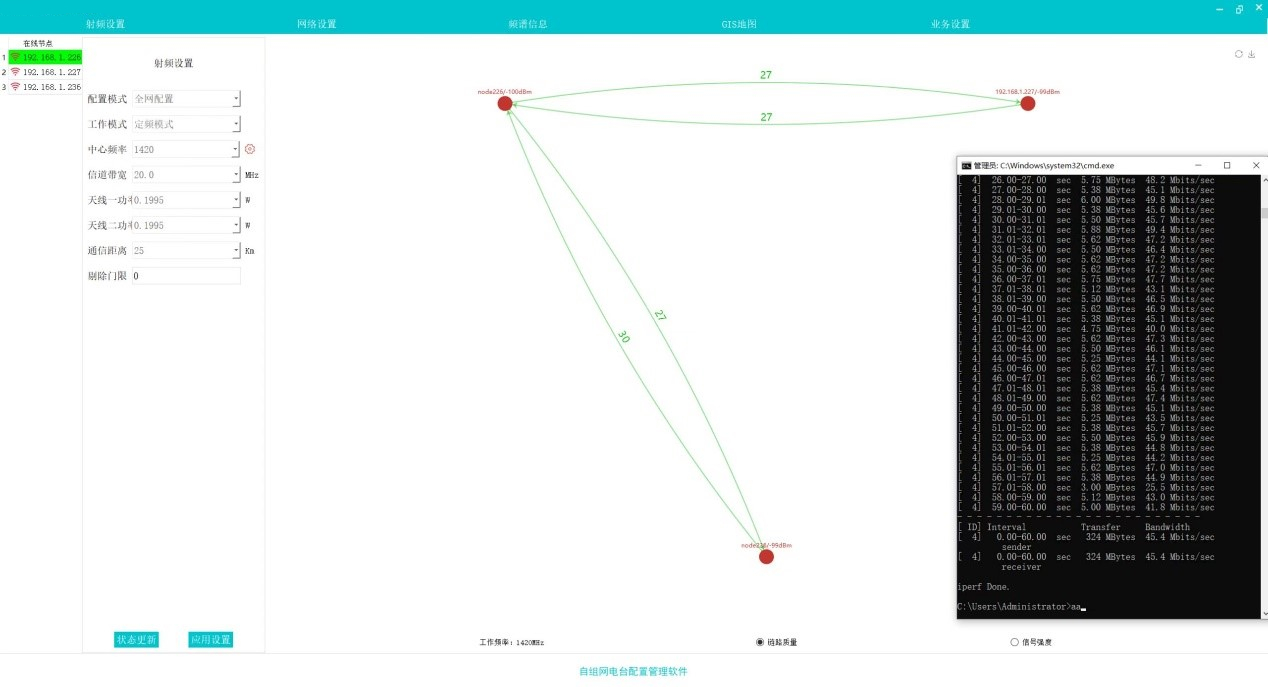
2跳测试(3个节点)
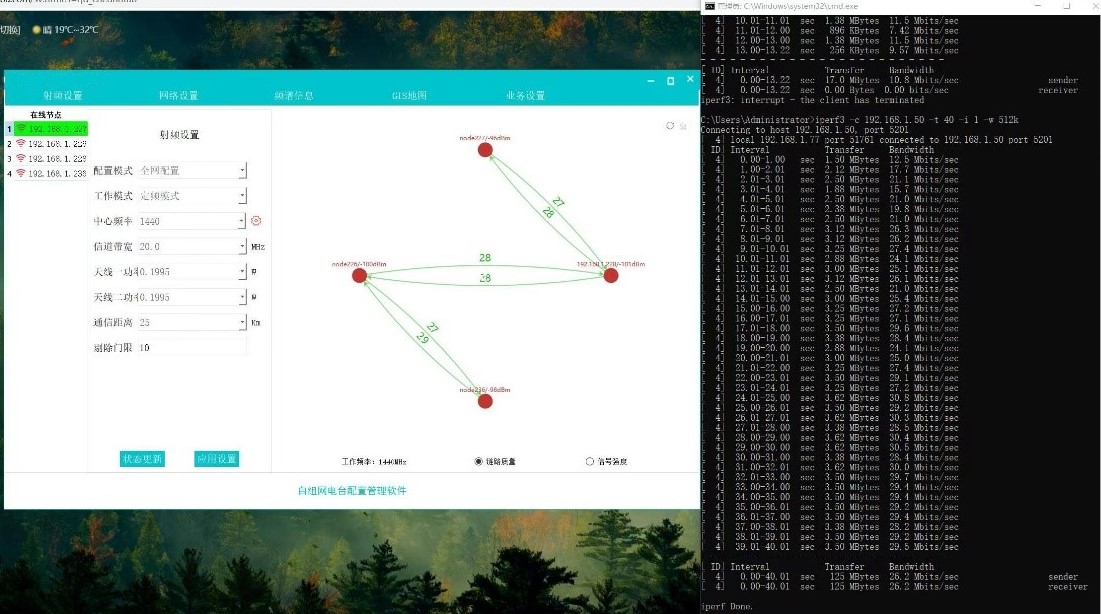
3跳测试(4个节点)
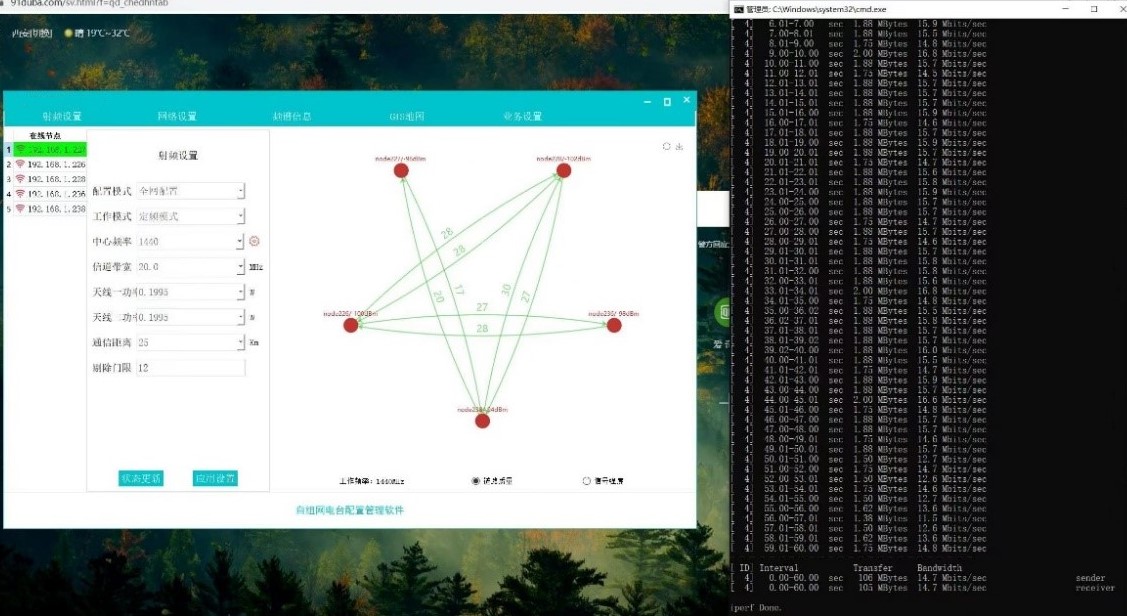
4跳测试(5个节点)
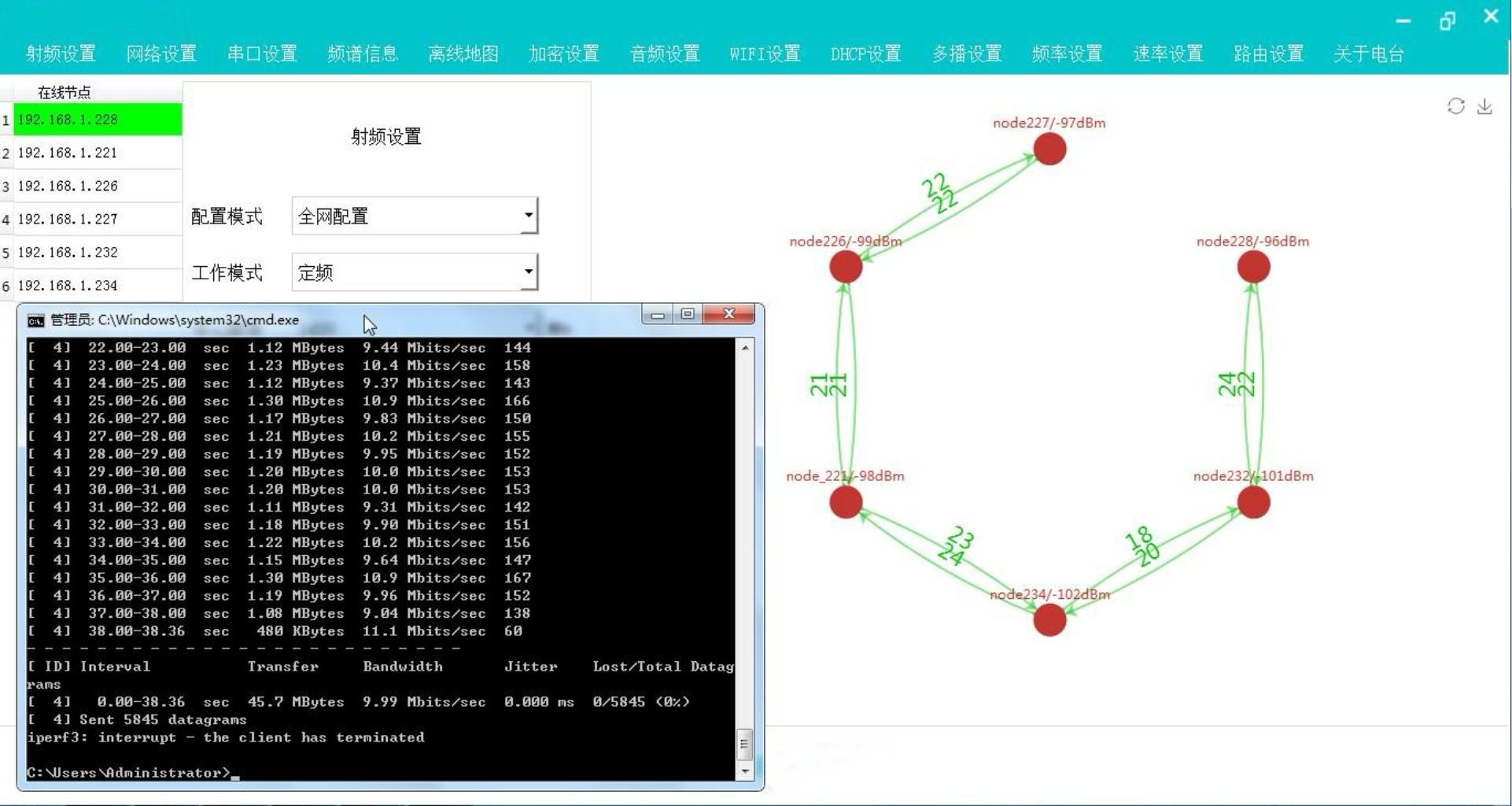
5跳测试(6个节点)
五、现场照片

节点1(8F办公室)

节点2(8F楼道)

节点3(7F楼梯间)

节点4(5F楼梯间)

节点5(3F楼梯间)
审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
宽带
+关注
关注
4文章
1062浏览量
64542
发布评论请先 登录
相关推荐
热点推荐
实用方案|无线Mesh自组网对讲信号覆盖方案(附测试与维护指南)
制约对讲功能的正常发挥。无线Mesh自组网凭借自组织、自修复、多跳中继的核心优势,成为解决这类痛点的最优路径之一,可实现指定区域内信号无死角覆盖,大幅提升无线对讲的可靠性与实用性。
MESH无线自组网方案技术原理
模式让讲话和收听同时进行,互相不干扰。本方案可以提供多种需求的方案定制,频段涵盖2.4G、430M、868M、915M等常用ISM频段,传输距离可近可远(10m-2Km),特别适合于各

解锁端到端仿真新可能 :全新 aiSim 6 即将发布
前言随着端到端自动驾驶从学术探索走向规模化应用,无论是特斯拉FSD神经模拟器、Waymo基于DeepMindGenie3的世界模型,还是国内主流车企的数据闭环体系,均在表明仿真系统的定

行业首个基于地平线单征程6M芯片的端到端城市NOA方案正式交付上车
2025年1月21日,理想AD Pro 4.0推送,行业首个基于地平线单征程6M芯片的端到端城市NOA方案正式交付上车。该方案由理想汽车主导研发,与轻舟智航共同打造,专为城市出行而生,
端到端自动驾驶仿真新范式:aiSim如何解决智驾测试的"灾难性挑战"
。然而,这种变革对仿真测试带来了"灾难性挑战"——传统仿真方法因感知与规控接口的消失而亟待重构。 2 aiSim:端到端智驾仿真的全链路解决方案 2.1 核心架构创新 康谋科技的aiS

如何训练好自动驾驶端到端模型?
[首发于智驾最前沿微信公众号]最近有位小伙伴在后台留言提问:端到端算法是怎样训练的?是模仿学习、强化学习和离线强化学习这三类吗?其实端到

端到端智驾模拟软件推荐——为什么选择Keymotek的aiSim?
随着自动驾驶技术的快速发展,车企和科技公司对于模拟测试平台的需求越来越强。从L2/ADAS到L4/L5等级的自动驾驶,虚拟模拟已经成为其中的关键一环。特别是对于「端对端」智驾(
自动驾驶中“一段式端到端”和“二段式端到端”有什么区别?
[首发于智驾最前沿微信公众号]最近有小伙伴提问,一段式端到端和二段式端到端有什么区别。其实说到自

科普|无线图传和宽带自组网有什么区别?
在很多应急场景下经常会使用到无线图传设备和宽带自组网设备,这两类设备都是在现场使用,通过无线网络技术,实现信息的传输。由于目前的视频应用比较普遍,主要传输的数据都是视频,很多情况下大家就不太清楚

MESH自组网赋能森林防火:云翎智能无线自组网厘米级定位与实时火情传输
在森林防火的数字化革新中,云翎智能以动态MESH自组网与北斗厘米级定位技术为核心,构建了“无盲区、高精度、实时性”的应急通信体系。通过无中心动态组网、多模融合定位及宽窄带融合传输,其解决方案实现了

森林草原防火应急通信自组网:云翎智能应急通信指挥调度解决方案
云翎智能森林草原消防应急专网建设方案一、技术架构与创新动态自组网核心无中心多跳中继:采用MESH自组网技术,支持单频组网,节点可自动识别最优

网络全覆盖,云翎智能如何用应急通信自组网技术守住万亩森林海的“通信防线”?
云翎智能通过部署去中心化自组网设备,构建起覆盖万亩森林的动态通信网络。该网络采用无线MESH协议与多跳中继技术,在密林、山地等复杂地形中实现信号智能路由,单节点覆盖半径扩展5倍,穿透3

山地、密林、断网区?云翎智能应急自组网破解森林防火通信痛点
:云翎智能森林防火应急自组网通信解决方案一、技术核心:无线自组网(MESH)的突破动态组网,无依赖基础设施设备间通过多跳中继自动建立网络,无需基站或卫星支持。在山地

蜂群智联・破界而生——蜂群自组网无线客户端重塑工业通信新范式
一、颠覆传统:当蜂群智慧融入无线通信 在工业物联网领域,传统有线网络的部署局限与中心化架构的脆弱性,始终是规模化互联的瓶颈。USR-FQ610蜂群自组网无线客户端,以仿生学蜂群协作原理为核心,打造



评论