 【小型轻量9轴姿态传感器/IMU】LPMS-CURS3系列
【小型轻量9轴姿态传感器/IMU】LPMS-CURS3系列

LPMS-CURS3是阿路比推出的一款高性能微型有线传输型姿态传感器,可利用 USB、UART(TTL和 RS232)、CANBUS多种接口,轻松与 PC机或工业设备进行通信,适用于机器人和人体动作的测量。
产品性能参数
#Q1综合参数

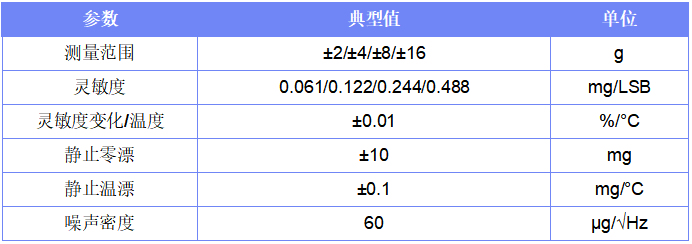
#Q2加速度计参数
#Q3陀螺仪参数

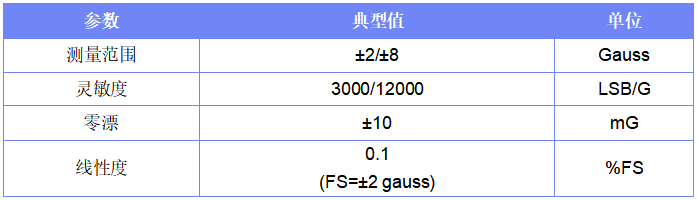
#Q4磁力计参数
#Q5气压计参数
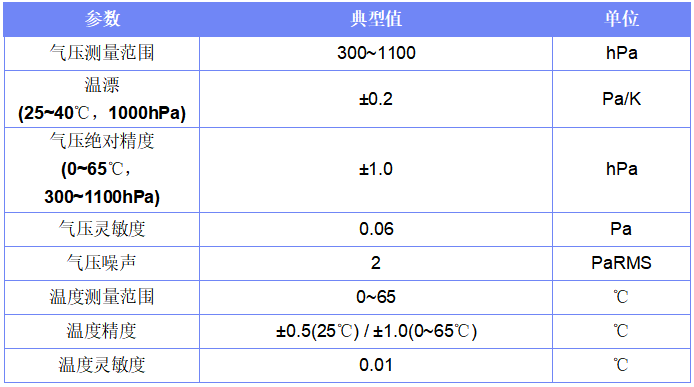
★以上为常温+25°C 下性能参数,其它温度条件下参考值会有所变化。
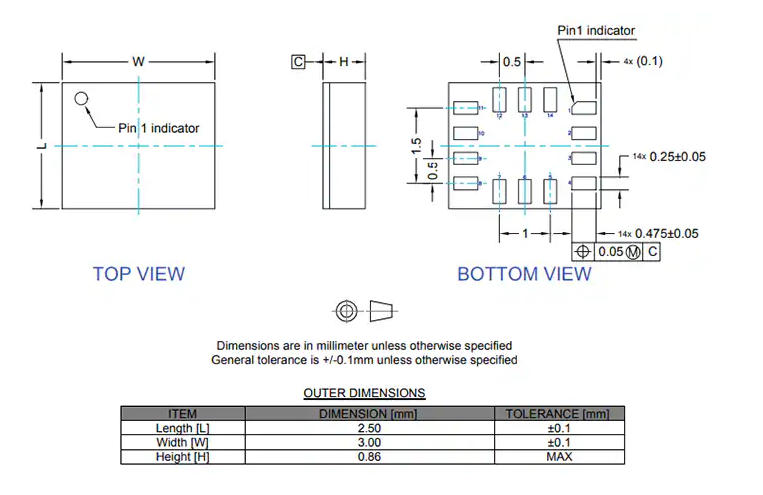
产品尺寸
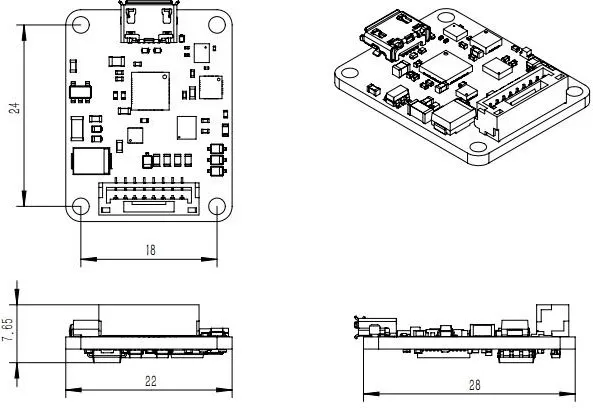
LPMS-CURS3-TTL/RS232/CAN工程图(单位:mm)
技术优势
★高精度,高稳定性
★集成三轴陀螺仪、三轴加速度计和三轴磁力计等传感器
★实时输出:原始数据、欧拉角、四元数、线性加速度、温度、气压
★通信接口:USB+RS232、USB+CAN或 USB+TTL
应用领域
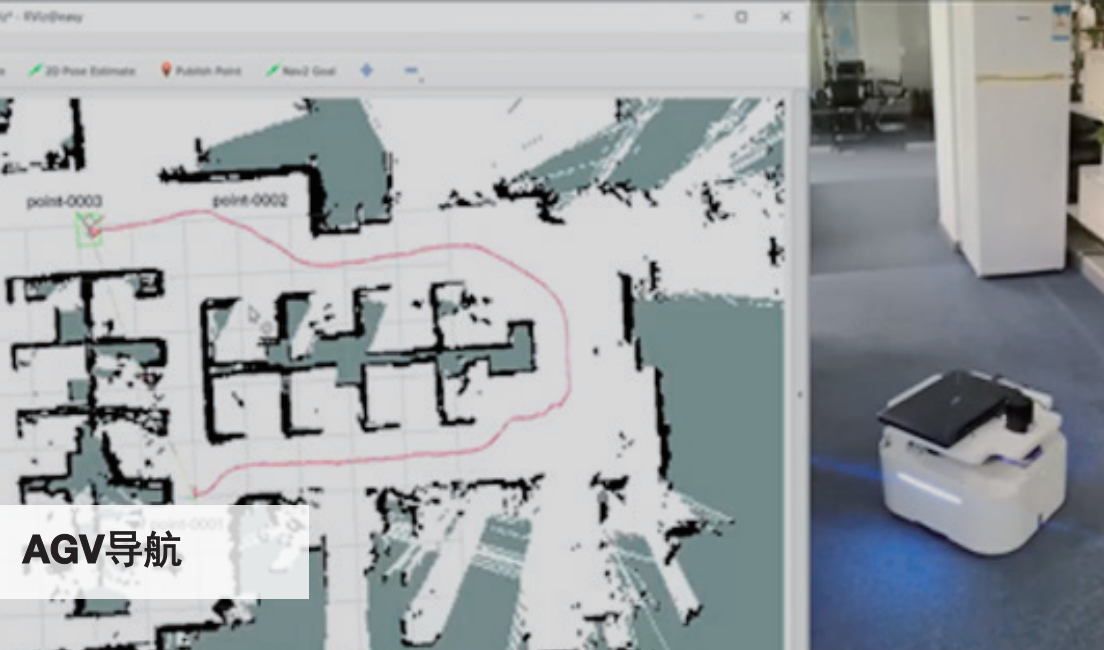
AGV导航

机械监控
配套资料
◢上位机软件【LpmsControl2】,可实时保存测试数据

◢驱动和例程

审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55833浏览量
795515 -
陀螺仪
+关注
关注
44文章
902浏览量
102210 -
IMU
+关注
关注
6文章
438浏览量
48190
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
传感器,集成谐波减速器型,量程±85Nm,过载500%。
宇立仪器(SRI):JTS系列,中空法兰结构,用于髋/膝大扭矩关节。
力晟传感:TD系列
发表于 05-20 17:40
高空立面作业的姿态传感核心——高性能MEMS IMU!
MEMS 惯性测量单元,凭借优异的陀螺、加速度计性能与多传感器融合设计,成为爬壁机器人解决姿态感知、运动控制、安全防护的关键硬件支撑。 高精度姿态解算 ER-MIMU-M02 内置零偏不稳定性2°/h 、零偏稳定性8°/h的三
如何选择三轴力传感器的量程
三轴力传感器广泛应用于工业、机器人、航空航天、汽车等领域,用于测量物体在三个轴向(X、Y、Z)上的力和扭矩。在选择三轴力传感器时,量程是一个关键的参数,它决定了

JY901S 9轴姿态角度传感器模块
模块集成高精度的陀螺仪、加速度计、地磁场传感器,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时运动姿态。

从静态到动态:MEMS IMU 重塑测绘传感边界
通过算法解算出姿态、速度、位移等运动状态,是惯性导航与运动控制的核心部件。 测绘里的MEMS IMU起到什么作用? MEMS IMU(惯性测量单元)是依托MEMS技术的IMU,是现代测
西门子S7-1200和S7-1500 PLC系列模拟量传感器怎么接线
西门子S7-1200和S7-1500PLC系列模拟量传感器怎么接线,现场看到的4线制,3线制,2线制模拟量

EPSON六轴IMU传感器高精度惯导模组M-G370/M-G552 IP67防水
EPSON六轴IMU传感器惯导模组,配备三轴陀螺仪和加速度传感器,温度特性高度稳定,M-G370偏置稳定性
意法半导体LSM6DSV320X IMU传感器在Linux平台的驱动移植与姿态感知应用实现
本期我们聚焦论坛网友短笛君的实测体验。他首先分享了MEMS上位机体验并进行MLC数据预采集,随后实现了LSM6DSV320X IMU传感器在Linux平台的驱动移植,并开发具备四元数和欧拉角解算的完整姿态感知应用,最后讲解了如何

新品上市:九轴姿态传感器!
在智能穿戴、无人机、机器人、VR/AR等高速发展的智能设备领域,精准、稳定、实时的姿态感知能力已成为产品竞争力的关键。HLK-AS201-9九轴姿态

LSM6DSV32X:高性能6轴IMU,赋能下一代智能运动感知应用
STMicroelectronics LSM6DSV32X 6轴惯性测量单元 (IMU) 是一款高性能、低功耗的6轴小型IMU,配备
SCH1633 6DoF传感器三大姿态功能
村田推出高精度汽车用6轴惯性传感器~一颗传感器可同时用于车辆自身位置推算、车辆姿态测量和前照灯调平~村田已开发出高性能的汽车用6轴惯性力

多传感器集成的 IMU,如何协同工作提升无人机性能?
体积,选择小型化则不得不牺牲测量稳定性。 ER-MIMU-103 MEMS IMU正是为破解这一矛盾而生。它将 3 轴陀螺仪、3
IMU的精度对无人机姿态控制意味着什么?
IMU的精度对无人机姿态控制至关重要,是决定无人机飞行稳定安全、响应性和任务执行能力的关键因素之一, IMU(包含三轴加速度计和三轴陀螺仪)
求助,关于ST的IMU和地磁计用motionfx库融合后航向角异常的问题求解
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如
发表于 06-10 07:19
九轴 IMU:赋能无人机,开启智能飞行新纪元
轴IMU ER-MIMU-063]为例,它具有三轴陀螺,三轴加速度计和三轴磁力计。它能够精准捕捉无人机在三维空间内的每一个细微动作与



评论